Comment fabriquer une voiture de course tout-terrain à partir d'un VTT pour enfants
 Rien dans ce monde ne dure éternellement, mais certains produits chinois étonnent simplement par leur «durabilité». Je vais parler de mon expérience dans la modernisation d'un VTT pour enfants.Ce que nous avons: un VTT KL-789 pour enfants avec des dysfonctionnements mineurs, un peu de temps libre et le désir d'y coller un arduino surchargé.Ce que nous voulons obtenir: quelque chose qui fonctionne plus d'un mois, de préférence avec des caractéristiques de fonctionnement améliorées.L'ATV dispose de deux moteurs collecteurs RS550 pour 12V, avec une vitesse d'arbre de 19300 tr / min au ralenti, connectés aux roues arrière d'un diamètre de ~ 30 cm à travers des boîtes de vitesses avec un rapport de transmission de ~ 131. Des mathématiques simples suggèrent que la vitesse maximale d'un véhicule donné devrait être de 19300/131/60 * 3,14 * 0,3 = 2,31 m / s ou 8,3 km / h. En pratique, il parcourt environ 7 km / h. Lors de la sélection de nouveaux composants, j'ai eu du mal à vouloir faire de la vitesse maximale, et à craindre que ce soit un véhicule trop dangereux pour les enfants. Par conséquent, il a été décidé qu'il devrait aller 1,5 à 2 fois plus vite. En plus des moteurs, j'en ai été déçu:
Rien dans ce monde ne dure éternellement, mais certains produits chinois étonnent simplement par leur «durabilité». Je vais parler de mon expérience dans la modernisation d'un VTT pour enfants.Ce que nous avons: un VTT KL-789 pour enfants avec des dysfonctionnements mineurs, un peu de temps libre et le désir d'y coller un arduino surchargé.Ce que nous voulons obtenir: quelque chose qui fonctionne plus d'un mois, de préférence avec des caractéristiques de fonctionnement améliorées.L'ATV dispose de deux moteurs collecteurs RS550 pour 12V, avec une vitesse d'arbre de 19300 tr / min au ralenti, connectés aux roues arrière d'un diamètre de ~ 30 cm à travers des boîtes de vitesses avec un rapport de transmission de ~ 131. Des mathématiques simples suggèrent que la vitesse maximale d'un véhicule donné devrait être de 19300/131/60 * 3,14 * 0,3 = 2,31 m / s ou 8,3 km / h. En pratique, il parcourt environ 7 km / h. Lors de la sélection de nouveaux composants, j'ai eu du mal à vouloir faire de la vitesse maximale, et à craindre que ce soit un véhicule trop dangereux pour les enfants. Par conséquent, il a été décidé qu'il devrait aller 1,5 à 2 fois plus vite. En plus des moteurs, j'en ai été déçu:- La batterie Gel 12V 10Ah, perdant la majeure partie de sa capacité à un courant de décharge élevé
- Système de gestion. La première vitesse est la pédale, les moteurs sont connectés en série. La deuxième vitesse est la poignée sur le volant, les moteurs sont connectés en parallèle. Le frein est automatique lorsque la pédale est relâchée, les enroulements du moteur se ferment. Ce circuit entraîne un démarrage brusque, une absence totale de roulement libre, le même frein brusque, tout cela entraîne des charges de courant élevées (le bouton de la pédale fondu pendant le mois de fonctionnement), et des charges mécaniques sur les boîtes de vitesses et les roues, sans oublier le banal pas le confort conduire
- Fils d'alimentation Section 0.75-1 sq. mm, qui avec des courants nominaux de 20A sont chauffés à une température significative
C'est-à-dire Je n'aimais absolument pas tous les appareils électriques. Après une petite réflexion, il a été décidé d'utiliser:- 11.1V () 240 (, , )
- 36000 rpm 11.1V, ~40000 rpm
- 120 ( )
- - , ,
- 100
- Bluetooth ,
- / , ,
- ,
- FET , 4 ,
- Teensy 2.0,
- -
- - , , , ,
De plus, pour réduire le grondement des roues en plastique et améliorer le confort de conduite, 4 pneus de 12,5 pouces pour poussettes ont été achetés, après quoi ils ont subi un petit raffinement avec un couteau de bureau, puis ils ont été tirés sur les roues du VTT et fixés avec des vis: quand tout est arrivé, j'étais assemblé un prototype sur mes genoux, il s'est avéré que les moteurs même sans charge chauffent jusqu'à 70 degrés en 3-5 minutes de fonctionnement, j'ai dû acheter deux refroidisseurs pour eux, et les régulateurs, au contraire, ne chauffent pas même avec les ventilateurs éteints (en regardant vers l'avant, ils ne chauffent pas non plus sur un VTT sous charge). Parce que nous avons deux moteurs de deux côtés différents, il était nécessaire de résoudre un autre problème - les moteurs tactiles ne tournent que dans une seule direction. Initialement, il était prévu de démonter un moteur et d'y faire tourner le capteur à 180 degrés ... mais la réalité a montré que cela ne peut pas être fait avec peu de sang. De plus, pendant les expériences avec le capteur et les synchronisations, l'un des régulateurs a partiellement grillé, en conséquence, j'ai refusé le capteur et je l'ai connecté comme des BC classiques. Le capteur lui-même se compose de trois capteurs Hall qui suivent la position du rotor et d'un capteur de température. Il a été décidé de ne pas quitter toute cette économie, mais de la connecter à MK et de l'utiliser comme capteur de température du moteur, capteur de régime moteur, et plus tard,connaître le rapport de vitesse - et comme capteur de vitesse.La bibliothèque pwmservo était quelque peu déroutante, elle est conçue pour contrôler les servos (dans mon cas, les régulateurs) via un PWM matériel, avec une précision de 1 degré, seulement 180 états, et la direction "avant" n'est que la moitié de la plage, c'est-à-dire 90 états. Il me semblait que cela ne suffisait pas, j'ai dû éditer la bibliothèque au détriment de l'arduin multiplateforme (cela ne s'est avéré que pour les contrôleurs à 16 MHz), le résultat a été de 1000 états dans chaque direction (l'unité a une durée PWM de 0,5 μs, PWM de 1 à 2 ms).Après que le travail "à genoux" ait été plus ou moins débogué, toute cette économie s'est installée sur un quad:Parce que la puissance s'est avérée être supérieure à 500 W, il était nécessaire de limiter le taux de montée du gaz, si vous tournez brusquement le gaz au maximum, la puissance augmentera en douceur et atteindra son maximum en environ 3 secondes. Je suis sûr que sans cela, un effet de retournement instantané se produirait.En général, voici un enregistrement vidéo de télémétrie depuis l'écran du téléphone, tout y est visible, uniquement à cause du capteur de vitesse légèrement plié dans le moteur gauche (colonne verte gauche) les données de vitesse sont légèrement sous-estimées, la vitesse maximale atteinte avec des batteries neuves est de 18 km / hLes valeurs des colonnes: bleu - température du moteur en degrés, vert - régime du moteur en tr / min, orange - puissance fournie aux moteurs en chiffres conventionnels de 0 à 1000, position de la poignée des gaz gris.Et voici comment ça se passe:Je ne me suis pas éloigné ... c'est au point mort, mais j'ai conduit sur le VTT lui-même, et à en juger par la télémétrie, il ne se soucie absolument pas de savoir qui est au sommetSur la première vidéo au départ, un craquement se fait entendre. Le tout premier soir, les boîtes de vitesses étaient complètement hors service. Le problème s'est avéré être que les boîtes de vitesses sont constituées d'engrenages en nylon tournant sur un axe en acier de 9 mm sans roulements, de sorte que la force de friction des engrenages était si grande que le milieu a simplement fondu dans les engrenages et l'alignement a été perdu. Dans un autre engrenage, l'engrenage a été soudé à l'axe, et l'axe a commencé à tourner dans le corps et à le faire fondre, ce qui a entraîné une perte d'alignement de l'engrenage.Pour résoudre ce problème, nous avions besoin de:Les nouveaux essieux mesuraient 5 mm, j'ai donc dû imprimer des bagues d'un diamètre extérieur de 9 mm sur une imprimante 3D et l'intérieur de 5 mm, afin d'installer de nouveaux axes dans l'ancien carter d'engrenage, des trous de 11 mm ont été percés dans des engrenages d'une profondeur de 5 mm avec des deux côtés (sièges porteurs). Les engrenages sont maintenant montés sur roulements, et également abondamment lubrifiés au lithol, et depuis plus de six mois, tout fonctionne parfaitement dans toutes les conditions:Mais je ne m'arrête pas là, la prochaine étape est les vitesses personnalisées de la boîte de vitesses, afin d'augmenter la vitesse à 25-30 km / h.
quand tout est arrivé, j'étais assemblé un prototype sur mes genoux, il s'est avéré que les moteurs même sans charge chauffent jusqu'à 70 degrés en 3-5 minutes de fonctionnement, j'ai dû acheter deux refroidisseurs pour eux, et les régulateurs, au contraire, ne chauffent pas même avec les ventilateurs éteints (en regardant vers l'avant, ils ne chauffent pas non plus sur un VTT sous charge). Parce que nous avons deux moteurs de deux côtés différents, il était nécessaire de résoudre un autre problème - les moteurs tactiles ne tournent que dans une seule direction. Initialement, il était prévu de démonter un moteur et d'y faire tourner le capteur à 180 degrés ... mais la réalité a montré que cela ne peut pas être fait avec peu de sang. De plus, pendant les expériences avec le capteur et les synchronisations, l'un des régulateurs a partiellement grillé, en conséquence, j'ai refusé le capteur et je l'ai connecté comme des BC classiques. Le capteur lui-même se compose de trois capteurs Hall qui suivent la position du rotor et d'un capteur de température. Il a été décidé de ne pas quitter toute cette économie, mais de la connecter à MK et de l'utiliser comme capteur de température du moteur, capteur de régime moteur, et plus tard,connaître le rapport de vitesse - et comme capteur de vitesse.La bibliothèque pwmservo était quelque peu déroutante, elle est conçue pour contrôler les servos (dans mon cas, les régulateurs) via un PWM matériel, avec une précision de 1 degré, seulement 180 états, et la direction "avant" n'est que la moitié de la plage, c'est-à-dire 90 états. Il me semblait que cela ne suffisait pas, j'ai dû éditer la bibliothèque au détriment de l'arduin multiplateforme (cela ne s'est avéré que pour les contrôleurs à 16 MHz), le résultat a été de 1000 états dans chaque direction (l'unité a une durée PWM de 0,5 μs, PWM de 1 à 2 ms).Après que le travail "à genoux" ait été plus ou moins débogué, toute cette économie s'est installée sur un quad:Parce que la puissance s'est avérée être supérieure à 500 W, il était nécessaire de limiter le taux de montée du gaz, si vous tournez brusquement le gaz au maximum, la puissance augmentera en douceur et atteindra son maximum en environ 3 secondes. Je suis sûr que sans cela, un effet de retournement instantané se produirait.En général, voici un enregistrement vidéo de télémétrie depuis l'écran du téléphone, tout y est visible, uniquement à cause du capteur de vitesse légèrement plié dans le moteur gauche (colonne verte gauche) les données de vitesse sont légèrement sous-estimées, la vitesse maximale atteinte avec des batteries neuves est de 18 km / hLes valeurs des colonnes: bleu - température du moteur en degrés, vert - régime du moteur en tr / min, orange - puissance fournie aux moteurs en chiffres conventionnels de 0 à 1000, position de la poignée des gaz gris.Et voici comment ça se passe:Je ne me suis pas éloigné ... c'est au point mort, mais j'ai conduit sur le VTT lui-même, et à en juger par la télémétrie, il ne se soucie absolument pas de savoir qui est au sommetSur la première vidéo au départ, un craquement se fait entendre. Le tout premier soir, les boîtes de vitesses étaient complètement hors service. Le problème s'est avéré être que les boîtes de vitesses sont constituées d'engrenages en nylon tournant sur un axe en acier de 9 mm sans roulements, de sorte que la force de friction des engrenages était si grande que le milieu a simplement fondu dans les engrenages et l'alignement a été perdu. Dans un autre engrenage, l'engrenage a été soudé à l'axe, et l'axe a commencé à tourner dans le corps et à le faire fondre, ce qui a entraîné une perte d'alignement de l'engrenage.Pour résoudre ce problème, nous avions besoin de:Les nouveaux essieux mesuraient 5 mm, j'ai donc dû imprimer des bagues d'un diamètre extérieur de 9 mm sur une imprimante 3D et l'intérieur de 5 mm, afin d'installer de nouveaux axes dans l'ancien carter d'engrenage, des trous de 11 mm ont été percés dans des engrenages d'une profondeur de 5 mm avec des deux côtés (sièges porteurs). Les engrenages sont maintenant montés sur roulements, et également abondamment lubrifiés au lithol, et depuis plus de six mois, tout fonctionne parfaitement dans toutes les conditions:Mais je ne m'arrête pas là, la prochaine étape est les vitesses personnalisées de la boîte de vitesses, afin d'augmenter la vitesse à 25-30 km / h.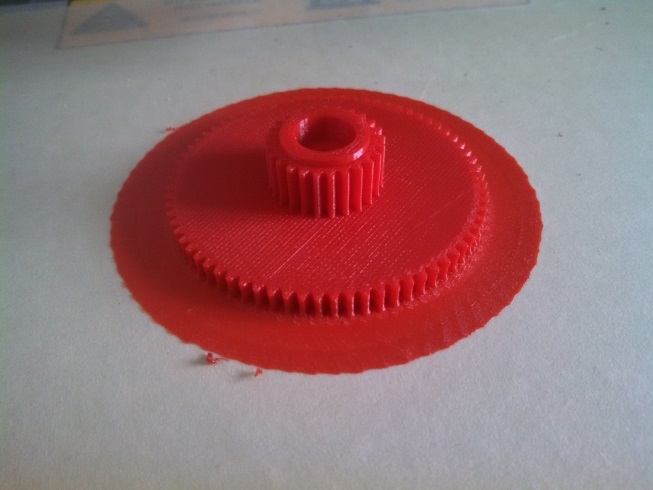 Les enfants apprennent très rapidement et savent déjà parfaitement entrer dans un virage à 90 degrés avec un peu de freinage, puis avec des gaz tranchants à la sortie du virage.Un croquis, une bibliothèque pwmservo modifiée, pinount peuvent être téléchargés ici , tout cela est sous forme de brouillon, il y a beaucoup de code inachevé et de débogage dans le code, pour lequel je m'excuse à l'avance.
Les enfants apprennent très rapidement et savent déjà parfaitement entrer dans un virage à 90 degrés avec un peu de freinage, puis avec des gaz tranchants à la sortie du virage.Un croquis, une bibliothèque pwmservo modifiée, pinount peuvent être téléchargés ici , tout cela est sous forme de brouillon, il y a beaucoup de code inachevé et de débogage dans le code, pour lequel je m'excuse à l'avance.Source: https://habr.com/ru/post/fr396209/
All Articles