Le robot SAW rampe, brouille et nage avec un seul moteur
 Si vous avez besoin de mouvement, l'appareil peut recourir aux roues et aux pistes, marcher ou entrer dans le niveau exotique de ramper et de nager. Il existe de nombreuses façons de faire bouger le robot. Parfois, il peut même sembler que rien de nouveau ne peut être inventé. Mais c'est loin d'être le cas. Dans un article récemment publié, David Zarruk de l'Université Ben Gourion du Néguev décrit un robot à vis sans fin qui est entraîné par un seul actionneur.Le robot est appelé: robot onduleur à actionneur unique ou SAW. Sa structure ondulée le pousse en avant ou en arrière. Pour les virages, vous avez besoin de volants. Une telle conception se déplace non seulement bien sur terre, mais peut également grimper dans des crevasses étroites et nager dans l'eau.Les chercheurs disent que les principes de ramper sont empruntés aux serpents. Bien que le déroulement du robot SAW puisse être comparé aux méthodes de déplacement du ver, l'analogie est arbitraire. Le corps d'un ver de terre est allongé en une partie en raison de l'amincissement. Le front-end avance, suivi du back qui se contracte. Le processus se répète. SAW est une sinusoïde en surface. Les principes du mouvement du robot sont similaires à ceux utilisés par certains petits animaux marins à une échelle beaucoup plus petite: les organismes microscopiques flottent à l'aide d'un flagelle.Démonstration vidéo du robot.Minimalisme, facilité de mouvement et haute performance - c'est ce sur quoi Zarruk travaille depuis longtemps. Dans une interview accordée au magazine IEEE Spectrum, Zarruk a déclaré qu'en 2004, en tant qu'étudiant, il avait tenté de recréer un mouvement ondulatoire similaire à celui des organismes vivants. Tout en travaillant sur un doctorat, Zarruk a eu l'idée d'utiliser le mouvement des vagues pour les systèmes du système digestif. Un système simple avec un moteur peut être réduit et utilisé pour se déplacer à l'intérieur des intestins.Il y a quelques années, Zarruk a donné un cours de conception de produits et a parlé des ressorts. Puis il a remarqué que dans une projection le ressort est un cercle, dans l'autre une sinusoïde. Si le ressort tourne, la vague se déplace sans complication. La simplicité des principes du mouvement a intéressé le chercheur. Image supérieure: le moteur tourne en spirale par rapport au boîtier. Photo du bas: 25 maillons encerclent la spirale, ils sont attachés au corps et ne tournent pas.
SAW a un moteur. Il fait tourner la colonne vertébrale du robot - une spirale rigide. Ce dernier est entouré d'une série de liens imprimés sur une imprimante 3D. Ces maillons sont mobiles dans un seul plan, comme des pièces d'une chaîne de vélo. La spirale tourne et les liens montent et descendent. Dans le même temps, les liens se déplacent de telle manière qu'au contact de la surface, ils poussent le robot vers l'avant.
Si vous avez besoin de mouvement, l'appareil peut recourir aux roues et aux pistes, marcher ou entrer dans le niveau exotique de ramper et de nager. Il existe de nombreuses façons de faire bouger le robot. Parfois, il peut même sembler que rien de nouveau ne peut être inventé. Mais c'est loin d'être le cas. Dans un article récemment publié, David Zarruk de l'Université Ben Gourion du Néguev décrit un robot à vis sans fin qui est entraîné par un seul actionneur.Le robot est appelé: robot onduleur à actionneur unique ou SAW. Sa structure ondulée le pousse en avant ou en arrière. Pour les virages, vous avez besoin de volants. Une telle conception se déplace non seulement bien sur terre, mais peut également grimper dans des crevasses étroites et nager dans l'eau.Les chercheurs disent que les principes de ramper sont empruntés aux serpents. Bien que le déroulement du robot SAW puisse être comparé aux méthodes de déplacement du ver, l'analogie est arbitraire. Le corps d'un ver de terre est allongé en une partie en raison de l'amincissement. Le front-end avance, suivi du back qui se contracte. Le processus se répète. SAW est une sinusoïde en surface. Les principes du mouvement du robot sont similaires à ceux utilisés par certains petits animaux marins à une échelle beaucoup plus petite: les organismes microscopiques flottent à l'aide d'un flagelle.Démonstration vidéo du robot.Minimalisme, facilité de mouvement et haute performance - c'est ce sur quoi Zarruk travaille depuis longtemps. Dans une interview accordée au magazine IEEE Spectrum, Zarruk a déclaré qu'en 2004, en tant qu'étudiant, il avait tenté de recréer un mouvement ondulatoire similaire à celui des organismes vivants. Tout en travaillant sur un doctorat, Zarruk a eu l'idée d'utiliser le mouvement des vagues pour les systèmes du système digestif. Un système simple avec un moteur peut être réduit et utilisé pour se déplacer à l'intérieur des intestins.Il y a quelques années, Zarruk a donné un cours de conception de produits et a parlé des ressorts. Puis il a remarqué que dans une projection le ressort est un cercle, dans l'autre une sinusoïde. Si le ressort tourne, la vague se déplace sans complication. La simplicité des principes du mouvement a intéressé le chercheur. Image supérieure: le moteur tourne en spirale par rapport au boîtier. Photo du bas: 25 maillons encerclent la spirale, ils sont attachés au corps et ne tournent pas.
SAW a un moteur. Il fait tourner la colonne vertébrale du robot - une spirale rigide. Ce dernier est entouré d'une série de liens imprimés sur une imprimante 3D. Ces maillons sont mobiles dans un seul plan, comme des pièces d'une chaîne de vélo. La spirale tourne et les liens montent et descendent. Dans le même temps, les liens se déplacent de telle manière qu'au contact de la surface, ils poussent le robot vers l'avant.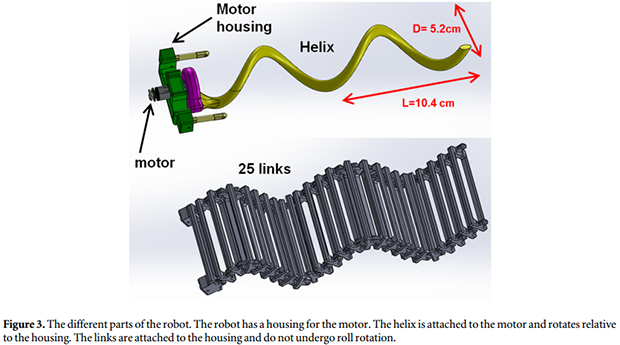
 L'onde va de droite à gauche, et les liens en contact avec la terre se déplacent légèrement vers la gauche et tournent dans le sens horaire.Le robot SAW peut uniquement avancer ou reculer. Pour inverser il suffit de tordre la spirale dans le sens opposé. Deux roues sur le boîtier lui permettent de se diriger, qui sont par ailleurs passives: elles n'alimentent pas l'appareil. Il peut sembler que la seule façon d'accélérer le mouvement est de faire tourner la spirale plus rapidement. Mais les chercheurs ont ajouté des dents aux liens qui vous permettent d'effectuer des mouvements à sept vagues en six cycles. La vitesse a donc augmenté de 13%. Les dents spéciales n'interfèrent pas avec les liens se déplaçant les uns par rapport aux autres.
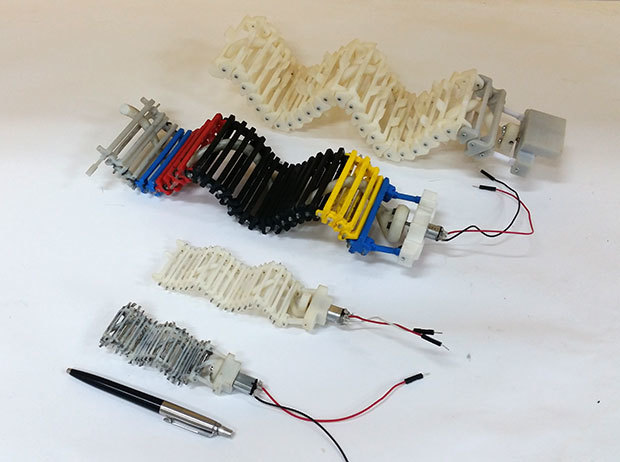
L'onde va de droite à gauche, et les liens en contact avec la terre se déplacent légèrement vers la gauche et tournent dans le sens horaire.Le robot SAW peut uniquement avancer ou reculer. Pour inverser il suffit de tordre la spirale dans le sens opposé. Deux roues sur le boîtier lui permettent de se diriger, qui sont par ailleurs passives: elles n'alimentent pas l'appareil. Il peut sembler que la seule façon d'accélérer le mouvement est de faire tourner la spirale plus rapidement. Mais les chercheurs ont ajouté des dents aux liens qui vous permettent d'effectuer des mouvements à sept vagues en six cycles. La vitesse a donc augmenté de 13%. Les dents spéciales n'interfèrent pas avec les liens se déplaçant les uns par rapport aux autres. Il a été réalisé en plusieurs modèles de tailles différentes. Le plus grand (multicolore) a une vitesse de 5,6 ondes par seconde ou 57 centimètres par seconde. Il peut grimper entre deux surfaces étroites à une vitesse de 8 cm / s. Enfermé dans un boîtier étanche, le modèle flotte à une vitesse de 6 cm / s. SAW fonctionne non seulement sur le sol plat du laboratoire, il surmonte le terrain et passe les pierres et l'herbe. SAW n'est pas seulement un jouet. Maintenant, il a été réduit à la taille d'un stylo (l'échantillon le plus bas sur la photo ci-dessus). À l'avenir, le robot pourra être miniaturisé à un point tel qu'il pourra retirer les intestins humains et prélever des échantillons pour la biopsie. Des travaux de réduction supplémentaires sont déjà en cours.Selon Zarruk, le robot ne nécessite quasiment pas d'entretien, ce qui est inhabituel pour la structure dynamique obtenue par l'impression 3D. À l'avenir, le système de roulage sera modifié - l'actuel n'est pas trop élégant. Les chercheurs veulent essayer de joindre deux robots SAW via une charnière. Et s'il s'avère à la volée de changer la fréquence des ondes et leur amplitude, alors le robot pourra mieux s'adapter aux différentes surfaces, se tortiller à travers des tuyaux de plusieurs diamètres et optimiser le mouvement pour chacun des fluides.Robot onduleur à un seul actionneur (SAW): conception, modélisation et expériences
Il a été réalisé en plusieurs modèles de tailles différentes. Le plus grand (multicolore) a une vitesse de 5,6 ondes par seconde ou 57 centimètres par seconde. Il peut grimper entre deux surfaces étroites à une vitesse de 8 cm / s. Enfermé dans un boîtier étanche, le modèle flotte à une vitesse de 6 cm / s. SAW fonctionne non seulement sur le sol plat du laboratoire, il surmonte le terrain et passe les pierres et l'herbe. SAW n'est pas seulement un jouet. Maintenant, il a été réduit à la taille d'un stylo (l'échantillon le plus bas sur la photo ci-dessus). À l'avenir, le robot pourra être miniaturisé à un point tel qu'il pourra retirer les intestins humains et prélever des échantillons pour la biopsie. Des travaux de réduction supplémentaires sont déjà en cours.Selon Zarruk, le robot ne nécessite quasiment pas d'entretien, ce qui est inhabituel pour la structure dynamique obtenue par l'impression 3D. À l'avenir, le système de roulage sera modifié - l'actuel n'est pas trop élégant. Les chercheurs veulent essayer de joindre deux robots SAW via une charnière. Et s'il s'avère à la volée de changer la fréquence des ondes et leur amplitude, alors le robot pourra mieux s'adapter aux différentes surfaces, se tortiller à travers des tuyaux de plusieurs diamètres et optimiser le mouvement pour chacun des fluides.Robot onduleur à un seul actionneur (SAW): conception, modélisation et expériencesSource: https://habr.com/ru/post/fr396323/
All Articles