Tentacules mécaniques manuels à la maison: Partie 2, Gestion des câbles
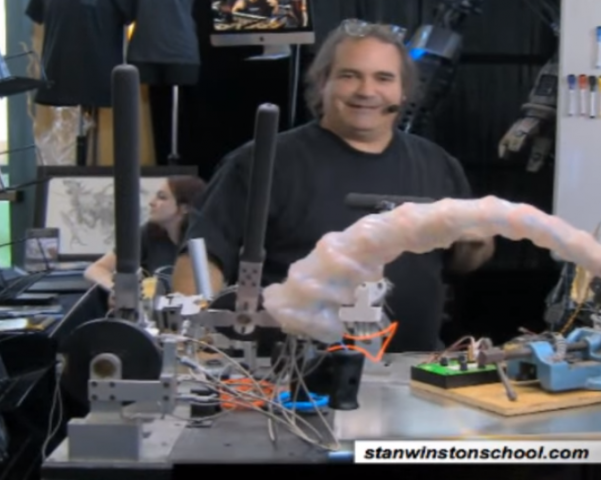 Dans le dernier article, nous avons rencontré un mécanisme en deux étapes pour les tentacules. Aujourd'hui, nous allons examiner de plus près l'une des nombreuses méthodes de contrôle manuel de ces animaux. Et le meilleur de tous, cette méthode est disponible pour la lecture à la maison!Sans système de contrôle, notre tentacule fait maison ne peut que pendre dans différentes directions, comme les pâtes trop cuites. Il est inutile sans un mécanisme de contrôle qui donnerait à tous les câbles la tension appropriée. Étant donné que seulement quatre paires de câbles contrôlent le mouvement du tentacule, il est facile de trouver un système de moteurs pour les contrôler. Mais pour commencer, j'ai décidé de me concentrer sur le contrôle manuel, comme c'est la coutume dans l'industrie cinématographique.
Dans le dernier article, nous avons rencontré un mécanisme en deux étapes pour les tentacules. Aujourd'hui, nous allons examiner de plus près l'une des nombreuses méthodes de contrôle manuel de ces animaux. Et le meilleur de tous, cette méthode est disponible pour la lecture à la maison!Sans système de contrôle, notre tentacule fait maison ne peut que pendre dans différentes directions, comme les pâtes trop cuites. Il est inutile sans un mécanisme de contrôle qui donnerait à tous les câbles la tension appropriée. Étant donné que seulement quatre paires de câbles contrôlent le mouvement du tentacule, il est facile de trouver un système de moteurs pour les contrôler. Mais pour commencer, j'ai décidé de me concentrer sur le contrôle manuel, comme c'est la coutume dans l'industrie cinématographique.
Connaître les commandes manuelles
Contrôle manuel? De toutes les possibilités de l'électronique, pour une raison quelconque, nous choisissons cette approche sans caverne, dépourvue d'électronique? Ne t'inquiète pas. Le contrôle manuel offre des fonctionnalités uniques qui, avec ses alternatives, ne sont pas si faciles à obtenir.Premièrement, un tel contrôle sera purement mécanique. Cela signifie que du point de vue des pièces de rechange, c'est simple. Aucune erreur d'alimentation ou de code. Dès que nous connectons correctement tous les câbles et traitons les éventuels problèmes, les contrôleurs fonctionnent simplement.Deuxièmement, contrairement au servo, ces contrôleurs fonctionnent en silence. Pas de tweets de servos bon marché. Si vos coudes et vos poignets ne craquent pas, le son lors du déplacement des tentacules est minime. Pour les réalisateurs passionnés, les accessoires silencieux peuvent devenir plus attrayants que l'alternative électronique - même s'ils peuvent ensuite supprimer le son pendant le traitement.Troisièmement, le contrôle manuel nous donne des commentaires. Si le tentacule rencontre un obstacle, la commande électronique sans capteur de pression ne le saura pas. Puisque les mains sont saisies par les contrôleurs attachés aux câbles qui transmettent la tension sur toute la longueur du tentacule, nous percevons directement les forces perçues par le tentacule. Nous pouvons les ressentir et nous sentons un obstacle.Enfin, les professionnels utilisent toujours des contrôleurs portables comme option de contrôle. Et bien que nous ne fabriquions pas nos contrôleurs en alliage d'aluminium 6061 en tant que professionnels, notre alternative en plastique n'est pas trop différente des circuits éprouvés du passé.Action inverse
 J'ai mentionné que la rétroaction venait de la fixation des câbles au tentacule. Pour le démontrer clairement, vous pouvez montrer une chose aussi drôle que l'action inverse. Vous pouvez déplacer directement le tentacule et ces actions seront transmises via les câbles aux contrôleurs.
J'ai mentionné que la rétroaction venait de la fixation des câbles au tentacule. Pour le démontrer clairement, vous pouvez montrer une chose aussi drôle que l'action inverse. Vous pouvez déplacer directement le tentacule et ces actions seront transmises via les câbles aux contrôleurs.Inspiration pour les contrôleurs
Le contrôleur est censé être fabriqué à l'aide d'un cutter laser (bien qu'il ait également une partie d'une imprimante 3D). Conception - adaptation des contrôleurs que j'ai vus dans les vidéos des maîtres des effets spéciaux. La plupart des contrôleurs ont vu des degrés de liberté séparés le long de deux axes différents, et ne les intègrent pas en un seul. Je pense que cela est dû à la simplicité de fabrication, mais aussi à la liberté de contrôle ultérieur du tentacule.
La plupart des contrôleurs ont vu des degrés de liberté séparés le long de deux axes différents, et ne les intègrent pas en un seul. Je pense que cela est dû à la simplicité de fabrication, mais aussi à la liberté de contrôle ultérieur du tentacule.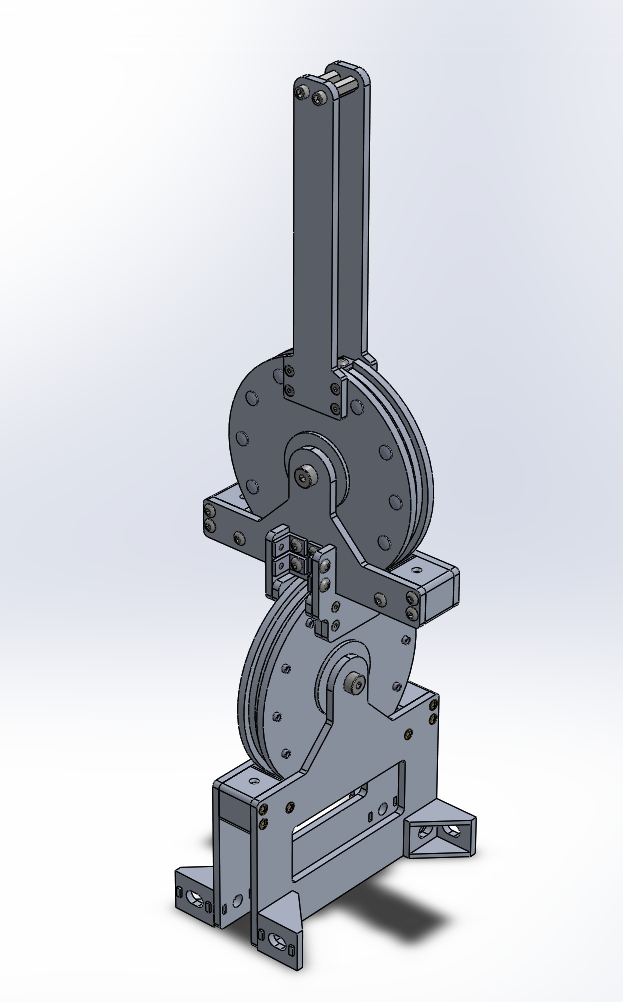
 J'ai fait mon contrôleur basé sur le matériel de formation Stan Winston Tutorial. Et bien qu'ils soient de type similaire, mon contrôleur est différent dans sa forme et son toucher, car il est censé être fabriqué à l'aide d'un cutter laser.L'option de découpe laser a été choisie car peu de personnes ont accès à des machines CNC. Les découpeurs laser se trouvent dans les écoles et les ateliers (hackerspace).Le plus grand changement dans la conception originale est l'échange de contrôleurs. Le mouvement du levier contrôlant le "pas" du tentacule jusqu'au fond nécessite l'utilisation de tout le bras à la fois. Et le même mouvement du contrôleur Landon est basé principalement sur les mouvements des poignets. Le changement de manettes m'a permis de décharger mes poignets, et j'espère que d'autres l'apprécieront aussi.
J'ai fait mon contrôleur basé sur le matériel de formation Stan Winston Tutorial. Et bien qu'ils soient de type similaire, mon contrôleur est différent dans sa forme et son toucher, car il est censé être fabriqué à l'aide d'un cutter laser.L'option de découpe laser a été choisie car peu de personnes ont accès à des machines CNC. Les découpeurs laser se trouvent dans les écoles et les ateliers (hackerspace).Le plus grand changement dans la conception originale est l'échange de contrôleurs. Le mouvement du levier contrôlant le "pas" du tentacule jusqu'au fond nécessite l'utilisation de tout le bras à la fois. Et le même mouvement du contrôleur Landon est basé principalement sur les mouvements des poignets. Le changement de manettes m'a permis de décharger mes poignets, et j'espère que d'autres l'apprécieront aussi.Conception du contrôleur
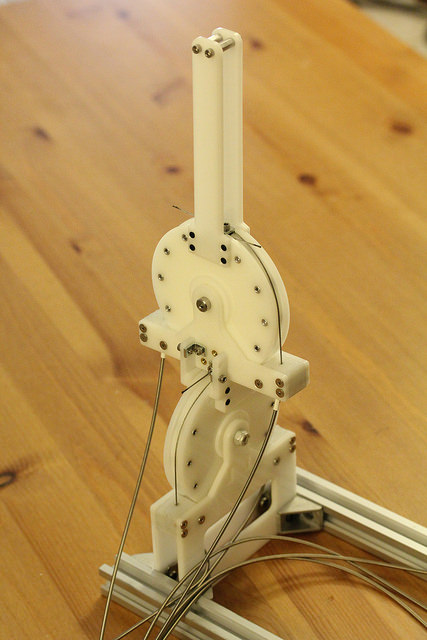
Comme un tentacule, le contrôleur se compose de nombreuses parties différentes, que nous n'avons pas encore mentionnées. Voici ses principales pièces et composants.Coins 612 et 621
 Peu de pièces finies comme moi plus que ces coins: 612K-ND et 621K-ND . Je n'ai pas trouvé un autre coin fini de la même petite taille. De plus, ils ont un filetage 4-40, ce qui les rend idéaux pour visser dans des endroits où il y a peu d'espace libre.Mais il n'y a rien d'idéal - et les coins de ces coins ne sont pas toujours strictement perpendiculaires. Mais dans ce cas, cela n'a pas d'importance - avec eux, je connecte deux poulies perpendiculaires sur le contrôleur. Ils sont maintenus par deux plaques en plastique, et les coins ne les maintiennent ensemble.
Peu de pièces finies comme moi plus que ces coins: 612K-ND et 621K-ND . Je n'ai pas trouvé un autre coin fini de la même petite taille. De plus, ils ont un filetage 4-40, ce qui les rend idéaux pour visser dans des endroits où il y a peu d'espace libre.Mais il n'y a rien d'idéal - et les coins de ces coins ne sont pas toujours strictement perpendiculaires. Mais dans ce cas, cela n'a pas d'importance - avec eux, je connecte deux poulies perpendiculaires sur le contrôleur. Ils sont maintenus par deux plaques en plastique, et les coins ne les maintiennent ensemble.Poulies rivetées
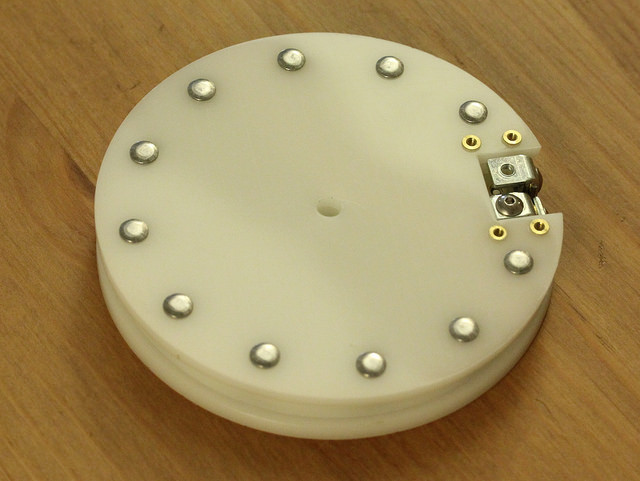 Les poulies se composent de quatre plaques. Étant rivetés ensemble ( colles à l' acétal très mal ), ils fonctionnent comme un tout.À l'œil non averti, cette partie peut sembler terminée. Mais deux propriétés importantes rendent la fabrication de cette pièce plus rentable que l'adaptation de toute pièce finie. Tout d'abord, chaque poulie tire et desserre les câbles responsables du mouvement. Cela signifie que ces câbles doivent être fermement attachés à la poulie. Pour cela, j'ai adapté deux colliers en haut de la poulie. Deuxièmement, la poulie doit être reliée soit à la poignée, si elle est utilisée en haut, soit à une autre poulie, si elle est en dessous.Dans les deux cas, les points de connexion ne sont pas au centre et la plupart des poulies finies n'ont pas de tels trous de montage. Dans un projet CAO, j'ai inclus ces trous dans les plaques. En conséquence, après la découpe au laser, une pièce avec des trous de montage prêts à l'emploi est obtenue. Et puisque le gabarit pour eux est le même pour la poignée et pour la connexion commune des poulies, les poulies supérieure et inférieure sont identiques.
Les poulies se composent de quatre plaques. Étant rivetés ensemble ( colles à l' acétal très mal ), ils fonctionnent comme un tout.À l'œil non averti, cette partie peut sembler terminée. Mais deux propriétés importantes rendent la fabrication de cette pièce plus rentable que l'adaptation de toute pièce finie. Tout d'abord, chaque poulie tire et desserre les câbles responsables du mouvement. Cela signifie que ces câbles doivent être fermement attachés à la poulie. Pour cela, j'ai adapté deux colliers en haut de la poulie. Deuxièmement, la poulie doit être reliée soit à la poignée, si elle est utilisée en haut, soit à une autre poulie, si elle est en dessous.Dans les deux cas, les points de connexion ne sont pas au centre et la plupart des poulies finies n'ont pas de tels trous de montage. Dans un projet CAO, j'ai inclus ces trous dans les plaques. En conséquence, après la découpe au laser, une pièce avec des trous de montage prêts à l'emploi est obtenue. Et puisque le gabarit pour eux est le même pour la poignée et pour la connexion commune des poulies, les poulies supérieure et inférieure sont identiques.Rivets
 Les poulies naissent sous la forme de quatre plaques, mais après assemblage, elles n'ont pas besoin d'être démontées. J'ai donc choisi des rivets. Ils donnent aux détails un aspect fini, sans oublier les moments agréables avec des rivets aplatis lors du montage. Et l'insertion d'un rivet est plus facile que de couper des filetages partout et de visser des vis.
Les poulies naissent sous la forme de quatre plaques, mais après assemblage, elles n'ont pas besoin d'être démontées. J'ai donc choisi des rivets. Ils donnent aux détails un aspect fini, sans oublier les moments agréables avec des rivets aplatis lors du montage. Et l'insertion d'un rivet est plus facile que de couper des filetages partout et de visser des vis.Serre-câbles
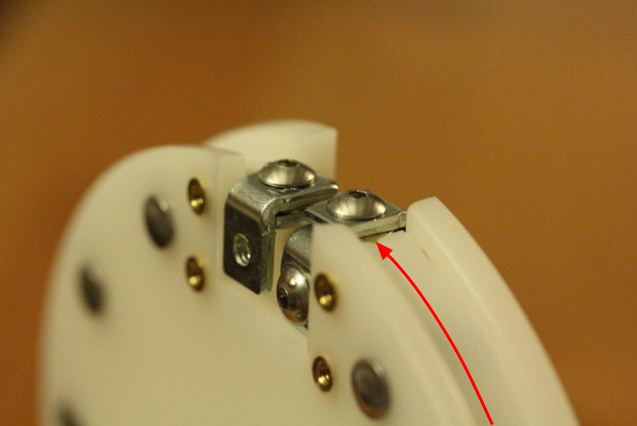 Dans le monde du prototypage rapide rapidement à la maison, nous sommes généralement limités aux matériaux mous ou cassants, car la plupart des pièces proviennent d'une imprimante 3D ou d'un découpeur laser. De plus, l'acétal a également un problème - il est très glissant, donc la pince ne peut pas simplement appuyer le câble sur la plaque. Dans de tels cas, vous devez transférer des fonctions critiques aux pièces finies. Nos pinces sont composées de deux coins en acier. Le câble est serré entre eux et tordu pour que l'acier appuie sur l'acier.
Dans le monde du prototypage rapide rapidement à la maison, nous sommes généralement limités aux matériaux mous ou cassants, car la plupart des pièces proviennent d'une imprimante 3D ou d'un découpeur laser. De plus, l'acétal a également un problème - il est très glissant, donc la pince ne peut pas simplement appuyer le câble sur la plaque. Dans de tels cas, vous devez transférer des fonctions critiques aux pièces finies. Nos pinces sont composées de deux coins en acier. Le câble est serré entre eux et tordu pour que l'acier appuie sur l'acier.Extrémité de canal de câble avec un manchon et une imprimante 3D
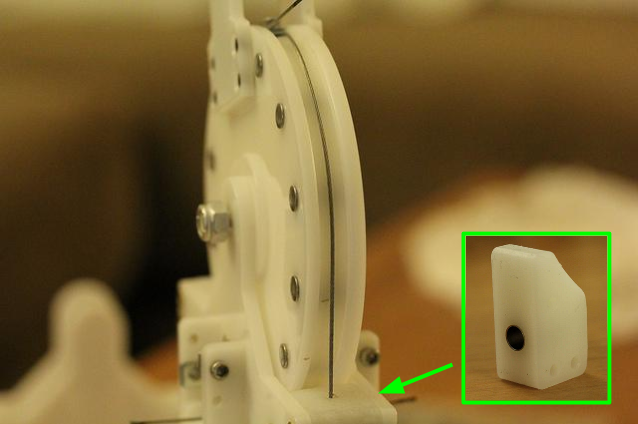 Chacun des canaux doit se terminer à un point spécifique sur le contrôleur afin que le câble puisse aller plus loin et se bloquer dans la poulie. Lorsque la poulie tire le fil, le canal ne bouge pas. Les mouvements du contrôleur changent la longueur du câble de la pince à l'extrémité du canal.Pour ce faire, j'ai fait un bloc avec un manchon intégré dans une imprimante 3D. Ces embrayages métalliques peuvent être trouvés dans les magasins de vélos et de motos et ils protégeront la partie imprimée de l'usure. Comme les serre-câbles faits d'angles métalliques, ces accouplements élimineront la charge de nos pièces.
Chacun des canaux doit se terminer à un point spécifique sur le contrôleur afin que le câble puisse aller plus loin et se bloquer dans la poulie. Lorsque la poulie tire le fil, le canal ne bouge pas. Les mouvements du contrôleur changent la longueur du câble de la pince à l'extrémité du canal.Pour ce faire, j'ai fait un bloc avec un manchon intégré dans une imprimante 3D. Ces embrayages métalliques peuvent être trouvés dans les magasins de vélos et de motos et ils protégeront la partie imprimée de l'usure. Comme les serre-câbles faits d'angles métalliques, ces accouplements élimineront la charge de nos pièces.Points d'attache
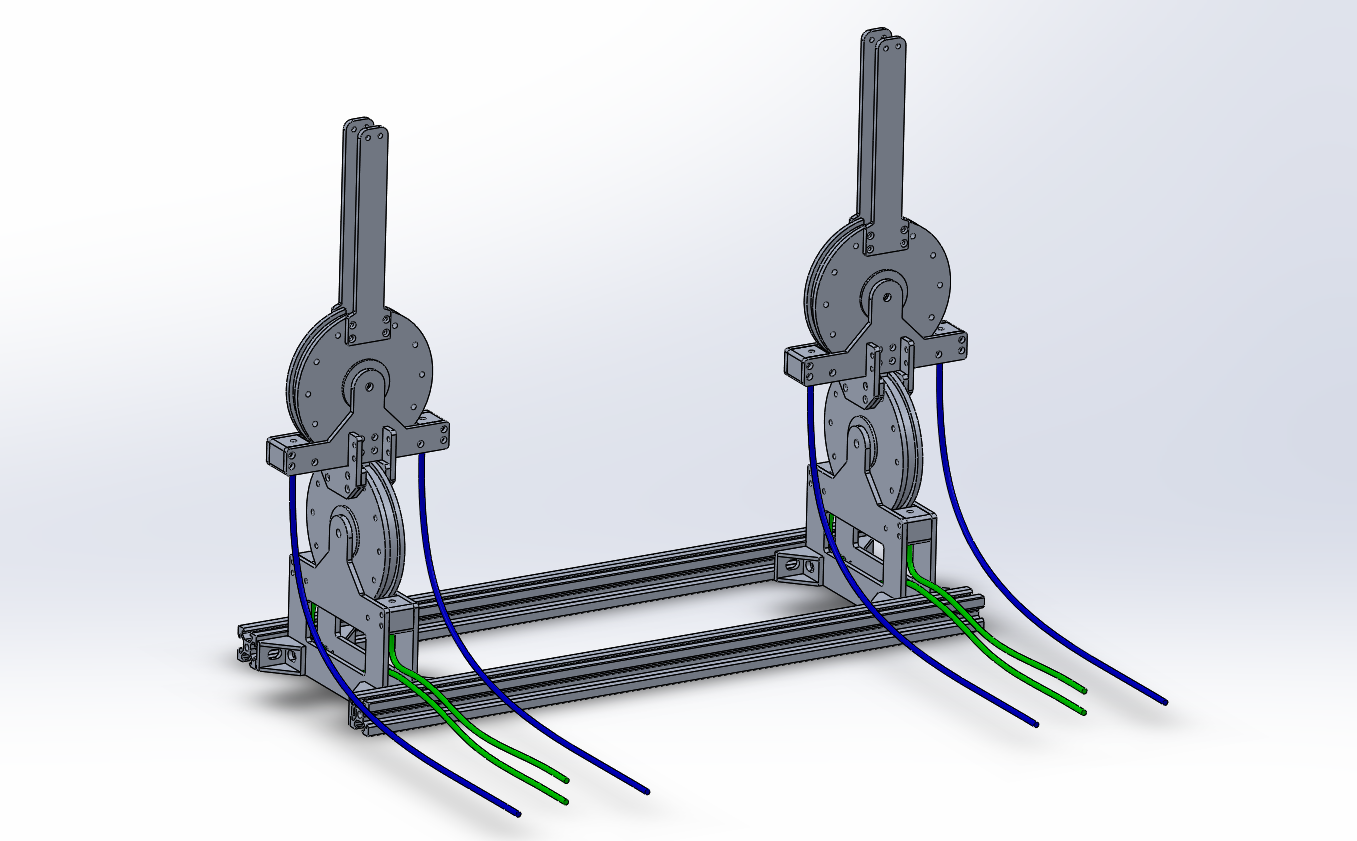 Il n'est pas possible de prédire la largeur des épaules de toutes les personnes, j'ai donc ajouté des supports pour les supports Makerslide. Ainsi, tout le monde peut couper les guides de la longueur désirée et fixer les contrôleurs de sorte qu'il soit pratique à utiliser.
Il n'est pas possible de prédire la largeur des épaules de toutes les personnes, j'ai donc ajouté des supports pour les supports Makerslide. Ainsi, tout le monde peut couper les guides de la longueur désirée et fixer les contrôleurs de sorte qu'il soit pratique à utiliser.À suivre
Je garde le journal photo et le modèle CAO à jour, et la prochaine fois nous nous concentrerons sur l'assemblage des contrôleurs et des tentacules.Source: https://habr.com/ru/post/fr398311/
All Articles