Le robot a appris à jouer au Lego, en regardant une personne
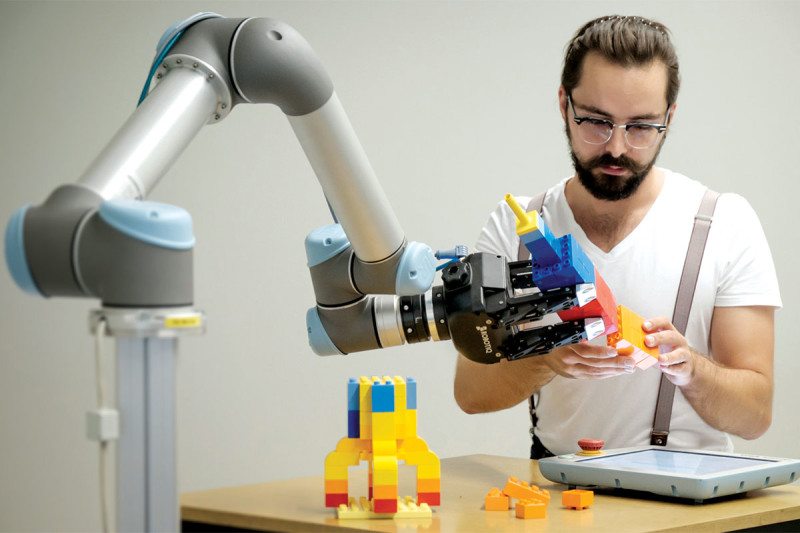 David Vogt enseigne à un robot comment construire une fusée à partir de briques Lego (Source: Arizona State University / TU Freiburg)David Vogt est professeur de robotique à la Freiberg University of Mining and Technology. Il a un fils qui aime jouer au Lego, ainsi que de nombreux détails de ce constructeur. Une fois, un scientifique a eu l'idée de tester la possibilité de former un robot pour assembler divers modèles à partir de pièces Lego."Mon fils et moi avons pensé que ce serait bien de créer un robot qui pourrait faire ce que nous faisons quand nous jouons " , dit Vogt. Un spécialiste avec un groupe de collègues a décidé d'acheter un manipulateur industriel robotisé pour son laboratoire. À leur arrivée à l'académie, les robots étaient équipés d'une caméra Kinect.À l'aide de cette caméra, le robot pouvait observer des personnes qui, à l'aide d'étiquettes pour suivre les mouvements, assemblaient une fusée à partir de briques Lego. Les gens ont assemblé plusieurs fois une fusée de même conception et le robot a progressivement reçu de plus en plus d'informations sur le processus d'assemblage de cet objet. Après un certain temps, il a pu interagir avec un partenaire humain, aidant son partenaire à assembler le modèle. Dans le même temps, le robot n'a pas toujours trouvé les détails nécessaires là où cela comptait, mais il savait déjà comment les rechercher par lui-même. Selon les experts, cela n'est qu'un exemple de formation de robots en démontrant comment une personne exécute un processus.Les gens apprennent en observant les autres sans trop de problèmes. Par exemple, les enfants ne reçoivent que des informations sur le monde et les actions des autres. Mais programmer un robot pour effectuer une nouvelle tâche est très difficile. Nous comprenons de manière purement intuitive comment accomplir l'une ou l'autre tâche, mais l'intuition n'est pas disponible pour le robot - toutes les actions doivent être définies de manière rigide à l'aide du programme.Mais maintenant, les spécialistes de la robotique tentent de maîtriser une nouvelle méthode de formation des robots - une méthode où les systèmes informatiques surveillent les actions humaines en collectant des données d'observation dans une base de données. Certains scientifiques tentent de contrôler les actions des robots à l'aide d'un ordinateur ou d'un téléphone, tandis que d'autres fournissentleurs pupilles ont une totale liberté d'action, leur permettant d'apprendre de leurs propres erreurs. De plus, les robots apprennent non seulement à assembler des objets à partir de Lego. Par exemple, l'année dernière, des scientifiques de l'Université du Maryland ont commencé à enseigner leur système à cuisiner, lui permettant de visualiser des vidéos culinaires sur YouTube.Google a récemment décidé de mener sa propre expérience avec des robots d'auto-apprentissage. Pour cela, des manipulateurs industriels ont été achetés, qui étaient connectés à une seule base de données. Chaque action de l'un des robots a été enregistrée, puis ces données ont été traitées par un réseau de neurones. Après analyse, le robot a reçu des instructions décrivant l'algorithme optimal des actions. Le travail que les systèmes ont essayé de former était d'ouvrir une porte avec une poignée.Dans l'une des expériences, le robot a été chargé d'étudier une variété d'objets. Ce sont des bouteilles d'eau, de la papeterie, des livres. Le système s'est rapidement habitué à la tâche et a transmis aux «collègues» des informations sur la séquence nécessaire de leurs actions. Après cela, le système a reçu une nouvelle tâche - déplacer un certain objet vers un point donné. Le robot n'a reçu aucune instruction sur les caractéristiques de l'objet et les objets changeaient constamment. Il s'est avéré que les robots peuvent bien faire de telles tâches, en utilisant les données accumulées lors de l'étude de ces objets. Les machines ont réussi à calculer les conséquences du déplacement de l'objet sur la surface jusqu'au point souhaité.Quant à l'ouverture des portes, dans l'un des cas, une personne a aidé les robots. D'autres machines ont reçu les données nécessaires à la formation d'un robot interagissant avec un partenaire humain, et ont ensuite utilisé ces informations pour répéter les actions d'un «collègue». Il s'est avéré qu'au fil du temps, les systèmes ont été formés assez efficacement par essais et erreurs. Après que les manipulateurs ont commencé à ouvrir des portes avec différents types de poignées sans problème, les conditions de la tâche ont été modifiées. Par exemple, la position de la porte, l'angle de son ouverture, etc., ont changé. Dans l'expérience finale, il s'est avéré que les robots peuvent ouvrir une porte et une serrure sans aide humaine, qu'ils n'ont pas encore rencontrés."Lorsque nous effectuons certaines actions, nous agissons souvent de manière intuitive, nous pouvons probablement transmettre cette intuition à des robots, qui, par conséquent, apprennent et travaillent plus rapidement", explique l'un des développeurs de Google.L'un des problèmes de ce type de formation de robot consiste à traduire les informations sous une forme compréhensible pour une machine. La plupart des robots ne disposent pas de capteurs qui leur permettent de percevoir l'environnement et les phénomènes qui s'y produisent comme un être humain. Par conséquent, ces informations doivent être adaptées à chaque fois pour les robots et leurs systèmes de contrôle. «Un bon professeur de robot comprend qu'il a affaire à une machine qui a une manière différente de percevoir la réalité environnante», explique Aude Billard de l' Ecole polytechnique fédérale de Lausanne (Suisse).David Vogt et son équipe sont convaincus que les humains peuvent entraîner des robots en démontrant leurs actions. Peut-être que cette méthode de formation peut être utilisée dans les entreprises. Ainsi, les systèmes robotiques peuvent être formés à de nouvelles fonctions sans utiliser le travail des programmeurs. Ainsi, un travailleur ordinaire sera en mesure de montrer au robot ce qui doit être fait, et il commencera à effectuer un nouveau travail pour lui-même."Idéalement, les humains et les robots devraient être en mesure d'effectuer des actions qu'ils ne peuvent pas effectuer séparément", a déclaré Vogt. Les résultats seront bientôt présentés par le professeur et ses collègues à la Conférence internationale des robots humanoïdes à Cancun, au Mexique.
David Vogt enseigne à un robot comment construire une fusée à partir de briques Lego (Source: Arizona State University / TU Freiburg)David Vogt est professeur de robotique à la Freiberg University of Mining and Technology. Il a un fils qui aime jouer au Lego, ainsi que de nombreux détails de ce constructeur. Une fois, un scientifique a eu l'idée de tester la possibilité de former un robot pour assembler divers modèles à partir de pièces Lego."Mon fils et moi avons pensé que ce serait bien de créer un robot qui pourrait faire ce que nous faisons quand nous jouons " , dit Vogt. Un spécialiste avec un groupe de collègues a décidé d'acheter un manipulateur industriel robotisé pour son laboratoire. À leur arrivée à l'académie, les robots étaient équipés d'une caméra Kinect.À l'aide de cette caméra, le robot pouvait observer des personnes qui, à l'aide d'étiquettes pour suivre les mouvements, assemblaient une fusée à partir de briques Lego. Les gens ont assemblé plusieurs fois une fusée de même conception et le robot a progressivement reçu de plus en plus d'informations sur le processus d'assemblage de cet objet. Après un certain temps, il a pu interagir avec un partenaire humain, aidant son partenaire à assembler le modèle. Dans le même temps, le robot n'a pas toujours trouvé les détails nécessaires là où cela comptait, mais il savait déjà comment les rechercher par lui-même. Selon les experts, cela n'est qu'un exemple de formation de robots en démontrant comment une personne exécute un processus.Les gens apprennent en observant les autres sans trop de problèmes. Par exemple, les enfants ne reçoivent que des informations sur le monde et les actions des autres. Mais programmer un robot pour effectuer une nouvelle tâche est très difficile. Nous comprenons de manière purement intuitive comment accomplir l'une ou l'autre tâche, mais l'intuition n'est pas disponible pour le robot - toutes les actions doivent être définies de manière rigide à l'aide du programme.Mais maintenant, les spécialistes de la robotique tentent de maîtriser une nouvelle méthode de formation des robots - une méthode où les systèmes informatiques surveillent les actions humaines en collectant des données d'observation dans une base de données. Certains scientifiques tentent de contrôler les actions des robots à l'aide d'un ordinateur ou d'un téléphone, tandis que d'autres fournissentleurs pupilles ont une totale liberté d'action, leur permettant d'apprendre de leurs propres erreurs. De plus, les robots apprennent non seulement à assembler des objets à partir de Lego. Par exemple, l'année dernière, des scientifiques de l'Université du Maryland ont commencé à enseigner leur système à cuisiner, lui permettant de visualiser des vidéos culinaires sur YouTube.Google a récemment décidé de mener sa propre expérience avec des robots d'auto-apprentissage. Pour cela, des manipulateurs industriels ont été achetés, qui étaient connectés à une seule base de données. Chaque action de l'un des robots a été enregistrée, puis ces données ont été traitées par un réseau de neurones. Après analyse, le robot a reçu des instructions décrivant l'algorithme optimal des actions. Le travail que les systèmes ont essayé de former était d'ouvrir une porte avec une poignée.Dans l'une des expériences, le robot a été chargé d'étudier une variété d'objets. Ce sont des bouteilles d'eau, de la papeterie, des livres. Le système s'est rapidement habitué à la tâche et a transmis aux «collègues» des informations sur la séquence nécessaire de leurs actions. Après cela, le système a reçu une nouvelle tâche - déplacer un certain objet vers un point donné. Le robot n'a reçu aucune instruction sur les caractéristiques de l'objet et les objets changeaient constamment. Il s'est avéré que les robots peuvent bien faire de telles tâches, en utilisant les données accumulées lors de l'étude de ces objets. Les machines ont réussi à calculer les conséquences du déplacement de l'objet sur la surface jusqu'au point souhaité.Quant à l'ouverture des portes, dans l'un des cas, une personne a aidé les robots. D'autres machines ont reçu les données nécessaires à la formation d'un robot interagissant avec un partenaire humain, et ont ensuite utilisé ces informations pour répéter les actions d'un «collègue». Il s'est avéré qu'au fil du temps, les systèmes ont été formés assez efficacement par essais et erreurs. Après que les manipulateurs ont commencé à ouvrir des portes avec différents types de poignées sans problème, les conditions de la tâche ont été modifiées. Par exemple, la position de la porte, l'angle de son ouverture, etc., ont changé. Dans l'expérience finale, il s'est avéré que les robots peuvent ouvrir une porte et une serrure sans aide humaine, qu'ils n'ont pas encore rencontrés."Lorsque nous effectuons certaines actions, nous agissons souvent de manière intuitive, nous pouvons probablement transmettre cette intuition à des robots, qui, par conséquent, apprennent et travaillent plus rapidement", explique l'un des développeurs de Google.L'un des problèmes de ce type de formation de robot consiste à traduire les informations sous une forme compréhensible pour une machine. La plupart des robots ne disposent pas de capteurs qui leur permettent de percevoir l'environnement et les phénomènes qui s'y produisent comme un être humain. Par conséquent, ces informations doivent être adaptées à chaque fois pour les robots et leurs systèmes de contrôle. «Un bon professeur de robot comprend qu'il a affaire à une machine qui a une manière différente de percevoir la réalité environnante», explique Aude Billard de l' Ecole polytechnique fédérale de Lausanne (Suisse).David Vogt et son équipe sont convaincus que les humains peuvent entraîner des robots en démontrant leurs actions. Peut-être que cette méthode de formation peut être utilisée dans les entreprises. Ainsi, les systèmes robotiques peuvent être formés à de nouvelles fonctions sans utiliser le travail des programmeurs. Ainsi, un travailleur ordinaire sera en mesure de montrer au robot ce qui doit être fait, et il commencera à effectuer un nouveau travail pour lui-même."Idéalement, les humains et les robots devraient être en mesure d'effectuer des actions qu'ils ne peuvent pas effectuer séparément", a déclaré Vogt. Les résultats seront bientôt présentés par le professeur et ses collègues à la Conférence internationale des robots humanoïdes à Cancun, au Mexique.Source: https://habr.com/ru/post/fr398751/
All Articles