Les futurs robots apprendront par la curiosité et l'autodétermination des objectifs
 Imaginez qu'un ami vous demande d'aider à nettoyer sa chambre, pleine de choses et de meubles différents. Mais imaginez aussi qu'il ne vous aidera pas, mais vous expliquera simplement, en montrant les photos, à quoi il aimerait que sa chambre ressemble à la fin. La tâche peut sembler ennuyeuse, mais chacun d'entre nous y fera face. Enfants, nous avons découvert de nouveaux objets, appris à les reconnaître et développé des compétences pour les manipuler. Poussés par la curiosité, nous avons progressivement développé des connaissances visuelles, attentives et sensori-motrices, nous permettant, adultes, de traiter notre environnement physique de notre choix.Les robots d'aujourd'hui ne sont pas adaptés à de telles tâches. Imaginez un robot humanoïde aidant à ranger une pièce. Supposons que vous ayez montré à un robot une pièce dans un état normal et nettoyé, et lorsqu'il y a un gâchis, vous ordonnez au robot de le ramener à son état d'origine. Dans de telles conditions, il serait très fatigant d'enseigner au robot où diriger son attention et comment gérer chacun des objets afin de le placer dans la bonne position au bon endroit, ou comment construire une séquence d'actions.Et bien que de nouveaux robots complexes et des algorithmes avancés apparaissent chaque année, l'exécution de tâches complexes et la recherche de solutions inconnues pour diverses tâches nécessitent une programmation fastidieuse des pièces liées à la motricité de niveau inférieur. Au mieux, les robots peuvent apprendre un petit ensemble d'actions inflexibles. En comparant les réalisations actuelles de l'IA avec l'intelligence biologique, nous verrons que l'IA a encore des limites en termes d'autonomie et de flexibilité.Les robots du futur devront être capables d'apprendre à comprendre de manière autonome leur environnement, c'est-à-dire à déterminer indépendamment des objectifs et à acquérir efficacement des compétences pour les atteindre, sur la base de l'acquisition, de la modification, de la généralisation et de la recombinaison des connaissances et des compétences acquises précédemment. Cela leur permettra, avec un peu de formation supplémentaire, de changer leur environnement de l'état actuel à un large éventail d'états finaux définis comme un objectif par l'utilisateur. La question est de savoir comment créer des robots du futur capables de faire face à une telle tâche?
Imaginez qu'un ami vous demande d'aider à nettoyer sa chambre, pleine de choses et de meubles différents. Mais imaginez aussi qu'il ne vous aidera pas, mais vous expliquera simplement, en montrant les photos, à quoi il aimerait que sa chambre ressemble à la fin. La tâche peut sembler ennuyeuse, mais chacun d'entre nous y fera face. Enfants, nous avons découvert de nouveaux objets, appris à les reconnaître et développé des compétences pour les manipuler. Poussés par la curiosité, nous avons progressivement développé des connaissances visuelles, attentives et sensori-motrices, nous permettant, adultes, de traiter notre environnement physique de notre choix.Les robots d'aujourd'hui ne sont pas adaptés à de telles tâches. Imaginez un robot humanoïde aidant à ranger une pièce. Supposons que vous ayez montré à un robot une pièce dans un état normal et nettoyé, et lorsqu'il y a un gâchis, vous ordonnez au robot de le ramener à son état d'origine. Dans de telles conditions, il serait très fatigant d'enseigner au robot où diriger son attention et comment gérer chacun des objets afin de le placer dans la bonne position au bon endroit, ou comment construire une séquence d'actions.Et bien que de nouveaux robots complexes et des algorithmes avancés apparaissent chaque année, l'exécution de tâches complexes et la recherche de solutions inconnues pour diverses tâches nécessitent une programmation fastidieuse des pièces liées à la motricité de niveau inférieur. Au mieux, les robots peuvent apprendre un petit ensemble d'actions inflexibles. En comparant les réalisations actuelles de l'IA avec l'intelligence biologique, nous verrons que l'IA a encore des limites en termes d'autonomie et de flexibilité.Les robots du futur devront être capables d'apprendre à comprendre de manière autonome leur environnement, c'est-à-dire à déterminer indépendamment des objectifs et à acquérir efficacement des compétences pour les atteindre, sur la base de l'acquisition, de la modification, de la généralisation et de la recombinaison des connaissances et des compétences acquises précédemment. Cela leur permettra, avec un peu de formation supplémentaire, de changer leur environnement de l'état actuel à un large éventail d'états finaux définis comme un objectif par l'utilisateur. La question est de savoir comment créer des robots du futur capables de faire face à une telle tâche?Projet GOAL-Robots
À la recherche d'une réponse à cette question, un projet important pour l'utilisation de l'IA a été lancé - le projet européen, supervisé par le Laboratoire de neurosciences informatiques incorporées , LOCEN, un groupe de recherche italien basé à l'Institut des sciences et technologies cognitives, propriété de la recherche publique italienne. Comité ( ISTC-CNR ).Le projet GOAL-Robots - Robots d' apprentissage autonome à composition non limitée basé sur les objectifs est arrivé en tête de la liste des 11 projets qui ont reçu un financement parmi 800 participants à la conférence téléphonique EU FET-OPEN(Future Emergent Technologies), et fait partie du programme de recherche Horizon 2020 EU. Le LOCEN et son conseiller académique, Gianluca Baldassarre, coordonneront un consortium qui comprendra trois autres groupes de recherche européens importants:1. Laboratoire de psychologie et de perception (LPP) de France, dirigé par Kevin O'Regan, travaillant à l'Institut de neurologie et des sciences cognitives de Paris nommé Descartes, mènera des expériences liées à l'acquisition de compétences et d'objectifs chez les enfants.2. Le Frankfurt Institute for Advanced Studies (FIAS) en Allemagne, dirigé par Jochen Triesch, se concentrera sur le développement de systèmes visuels et de capacités motrices similaires à ceux biologiques.3.Une équipe d'experts en robotique dirigée par Jan Peters, Université de technologie de Darmstadt (TUDa) en Allemagne, fera la démonstration de robots pour le projet.GOAL-Robots suit le précédent projet européen IM-CLeVeR («robots universels à apprentissage cumulatif à motivation interne»), dans lequel LOCEN et ses partenaires précédents ont étudié le rôle de la motivation intrinsèque (VM) dans l'induction de l'auto-apprentissage dans les organismes vivants et dans les robots. La recherche sur les VM a commencé par observer comment les enfants, par curiosité, explorent et interagissent avec le monde extérieur, acquièrent des connaissances sur le fonctionnement des choses et acquièrent un large répertoire de compétences sensori-motrices pour interagir avec eux.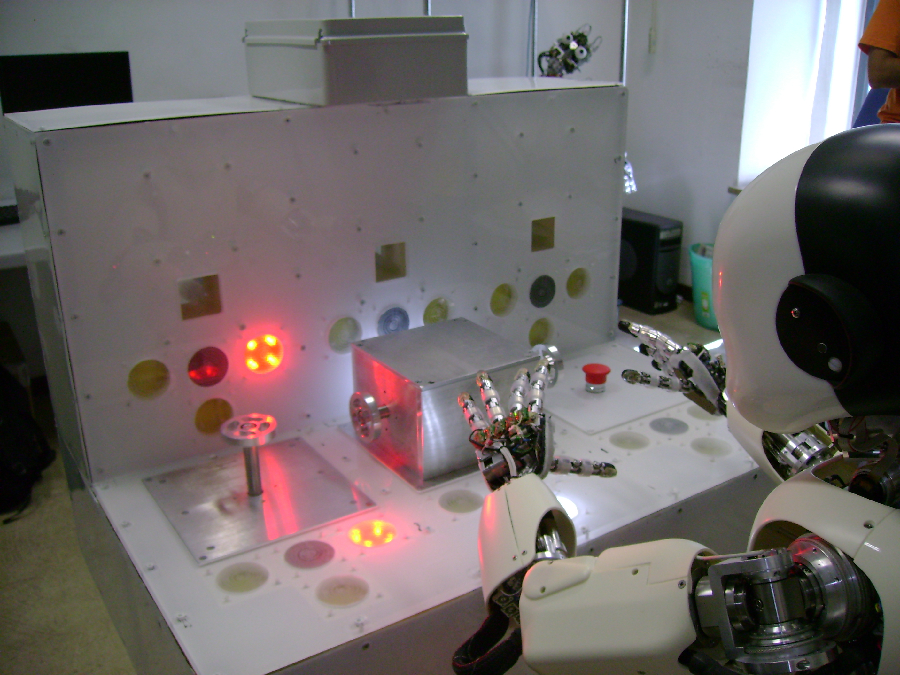 Si la curiosité et les VM sont à la base de l'universalité et de l'adaptabilité humaines, l'IA avec une architecture et un algorithme émulant des VM peut aider à créer un «moteur de motivation» qui guidera les robots à travers un processus d'apprentissage ouvert autonome qui ne nécessite pas de programmation constante et de formation humaine.GOAL-Robots ajoute également une composante importante au développement de la formation robot ouverte: les objectifs. Un objectif est une représentation interne d'une personne sur le monde, l'état d'un corps ou d'un événement, ou un ensemble d'événements, qui a deux propriétés importantes. Premièrement, une personne peut provoquer cette idée même en l'absence de perception de l'état correspondant du monde ou de l'événement. Deuxièmement, ce défi a un effet de motivation, c'est-à-dire qu'il peut affecter le choix, la concentration de la personnalité et du comportement, et conduire son processus d'apprentissage à atteindre l'objectif. La capacité de créer des objectifs de motivation à volonté, bien qu'abstraites, et leur utilisation pour choisir des actions et de la formation, est un élément clé de la flexibilité comportementale et de la capacité de former des individus biologiques. Les participants au projet croientque fournir aux robots des mécanismes adaptés à la formation et à la poursuite d'objectifs éducatifs augmentera radicalement leur potentiel d'apprentissage indépendant.
Si la curiosité et les VM sont à la base de l'universalité et de l'adaptabilité humaines, l'IA avec une architecture et un algorithme émulant des VM peut aider à créer un «moteur de motivation» qui guidera les robots à travers un processus d'apprentissage ouvert autonome qui ne nécessite pas de programmation constante et de formation humaine.GOAL-Robots ajoute également une composante importante au développement de la formation robot ouverte: les objectifs. Un objectif est une représentation interne d'une personne sur le monde, l'état d'un corps ou d'un événement, ou un ensemble d'événements, qui a deux propriétés importantes. Premièrement, une personne peut provoquer cette idée même en l'absence de perception de l'état correspondant du monde ou de l'événement. Deuxièmement, ce défi a un effet de motivation, c'est-à-dire qu'il peut affecter le choix, la concentration de la personnalité et du comportement, et conduire son processus d'apprentissage à atteindre l'objectif. La capacité de créer des objectifs de motivation à volonté, bien qu'abstraites, et leur utilisation pour choisir des actions et de la formation, est un élément clé de la flexibilité comportementale et de la capacité de former des individus biologiques. Les participants au projet croientque fournir aux robots des mécanismes adaptés à la formation et à la poursuite d'objectifs éducatifs augmentera radicalement leur potentiel d'apprentissage indépendant.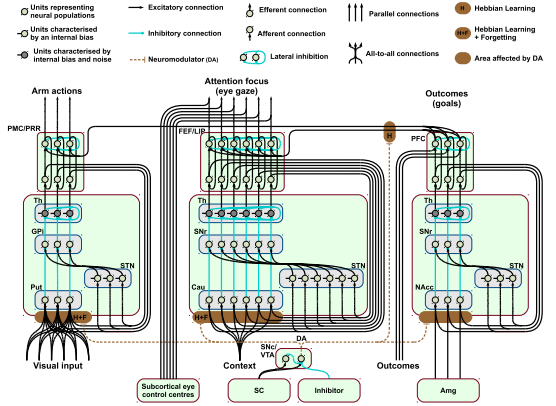
Tâches et idées
L'idée du projet est une combinaison de mécanismes liés à la VM et aux objectifs de puissance motivante. En particulier, VM stimulera les robots pour découvrir indépendamment de nouveaux événements intéressants qui se sont produits en raison des actions d'eux-mêmes. Les robots exploreront leur environnement sous l'influence de la curiosité et fixeront de manière indépendante des objectifs de plus en plus complexes, et les utiliseront pour acquérir diverses compétences dans un style ouvert. Un processus ouvert d'acquisition de capacités nécessite des mécanismes complexes et l'intégration de divers composants d'architecture. En particulier, les robots devront acquérir de nouvelles compétences sans rompre les compétences précédemment acquises, et en même temps, réutiliser les compétences précédemment acquises pour accélérer l'acquisition de nouvelles (transfert de connaissances). De plus, ils devront apprendre à combiner des compétences pré-acquises pour créer des compétences plus complexes. Ce sont les défis les plus importants de l'IA pour aujourd'hui. Pour les résoudre, le projet utilisera des algorithmes avancés, à la fois pour le traitement des informations sensorielles (par exemple, en utilisant des réseaux d'apprentissage en profondeur) et pour organiser et utiliser les connaissances liées à la motricité (par exemple, en utilisant des primitives de mouvement dynamique et des réseaux de neurones avec effet d'écho [écho -réseaux neuronaux]).Tous les mécanismes associés aux différentes parties du processus d'apprentissage devront être intégrés dans une architecture de contrôle: les processus de formation d'objectifs de haut niveau seront combinés avec des couches de motivation dans lesquelles, sur la base de la machine virtuelle, le robot formera et sélectionnera des objectifs. Les objectifs seront progressivement associés au niveau inférieur des contrôleurs afin que le robot puisse rappeler les compétences acquises pour atteindre les objectifs souhaités et développer des compétences plus complexes basées sur une combinaison des précédentes. Le transfert de connaissances entre différentes compétences sera intégré en tenant compte de la nécessité d'éliminer les interférences mutuelles, etc. Ces mécanismes sont utiles non seulement pour la phase d'apprentissage indépendant, mais aussi pour la possibilité d'utiliser les connaissances acquises par l'utilisateur.
Un processus ouvert d'acquisition de capacités nécessite des mécanismes complexes et l'intégration de divers composants d'architecture. En particulier, les robots devront acquérir de nouvelles compétences sans rompre les compétences précédemment acquises, et en même temps, réutiliser les compétences précédemment acquises pour accélérer l'acquisition de nouvelles (transfert de connaissances). De plus, ils devront apprendre à combiner des compétences pré-acquises pour créer des compétences plus complexes. Ce sont les défis les plus importants de l'IA pour aujourd'hui. Pour les résoudre, le projet utilisera des algorithmes avancés, à la fois pour le traitement des informations sensorielles (par exemple, en utilisant des réseaux d'apprentissage en profondeur) et pour organiser et utiliser les connaissances liées à la motricité (par exemple, en utilisant des primitives de mouvement dynamique et des réseaux de neurones avec effet d'écho [écho -réseaux neuronaux]).Tous les mécanismes associés aux différentes parties du processus d'apprentissage devront être intégrés dans une architecture de contrôle: les processus de formation d'objectifs de haut niveau seront combinés avec des couches de motivation dans lesquelles, sur la base de la machine virtuelle, le robot formera et sélectionnera des objectifs. Les objectifs seront progressivement associés au niveau inférieur des contrôleurs afin que le robot puisse rappeler les compétences acquises pour atteindre les objectifs souhaités et développer des compétences plus complexes basées sur une combinaison des précédentes. Le transfert de connaissances entre différentes compétences sera intégré en tenant compte de la nécessité d'éliminer les interférences mutuelles, etc. Ces mécanismes sont utiles non seulement pour la phase d'apprentissage indépendant, mais aussi pour la possibilité d'utiliser les connaissances acquises par l'utilisateur. Chaque année, le projet présentera un «robot de démonstration», et des plates-formes robotiques complexes (telles que iCub ou Kuka) seront contrôlées par des architectures développées dans le projet pour résoudre des tâches de complexité croissante. Ces démonstrateurs montreront non seulement les progrès du projet, mais deviendront également des critères de comparaison des progrès dans le développement de robots indépendants.Le démonstrateur final devra faire face à la tâche formulée au début de l'article: est-il possible pour le robot de démontrer une universalité et une adaptabilité similaires à celles des humains, en interaction avec le monde réel? En particulier, les robots auront pour tâche: a) d'étudier la position de plusieurs objets situés dans des conteneurs et sur des étagères correspondant à la commande, et b) de reproduire cet état après que l'utilisateur aura déplacé et échangé les objets.Si le projet GOAL-Robots tient ses promesses, vous n'aurez plus à vous soucier des amis paresseux: lorsqu'ils vous demandent de l'aide, il vous suffit de demander à vos amis artificiels de les aider!
Chaque année, le projet présentera un «robot de démonstration», et des plates-formes robotiques complexes (telles que iCub ou Kuka) seront contrôlées par des architectures développées dans le projet pour résoudre des tâches de complexité croissante. Ces démonstrateurs montreront non seulement les progrès du projet, mais deviendront également des critères de comparaison des progrès dans le développement de robots indépendants.Le démonstrateur final devra faire face à la tâche formulée au début de l'article: est-il possible pour le robot de démontrer une universalité et une adaptabilité similaires à celles des humains, en interaction avec le monde réel? En particulier, les robots auront pour tâche: a) d'étudier la position de plusieurs objets situés dans des conteneurs et sur des étagères correspondant à la commande, et b) de reproduire cet état après que l'utilisateur aura déplacé et échangé les objets.Si le projet GOAL-Robots tient ses promesses, vous n'aurez plus à vous soucier des amis paresseux: lorsqu'ils vous demandent de l'aide, il vous suffit de demander à vos amis artificiels de les aider!Source: https://habr.com/ru/post/fr398815/
All Articles