Développement d'un kit d'électrification vélo
Salutations à tous ceux qui aiment l'électronique! Je m'appelle Vasily Sukhoparov, je suis le directeur technique d'Eczo.bike. Je veux parler de la façon dont nous avons développé un kit d'électrification de vélo, des pièges auxquels nous avons dû faire face et des astuces techniques à suivre. À venir seront un peu de programmation STM32, des circuits, les subtilités de la conception de cartes de puissance et quelques mots sur le composant mécanique du CEM (Bicycle Electrification Kit). Kit d'électrification d'une puissance maximale de 2600 W, ordinateur de bord, tracker et batteries remplaçables.
Pourquoi tout cela a-t-il été inventé?
Avoir l'expérience de l'auto-assemblage d'un vélo électrique en pièces et d'un grand nombre de cônes emballés dans le processus, m'a amené à comprendre qu'il n'y a actuellement aucune offre sur le marché qui répond à tous mes besoins.Chaque détail devait être personnalisé, les fermes collectives, inventé quelque chose à partir de zéro. Vous ne pouvez pas simplement prendre et brancher l’électronique sur un vélo, comme une nouvelle carte vidéo dans un ordinateur. Il n'y avait pas de système Plug and Play Ride.Son propre système pourrait fournir:- la modularité- une interface conviviale- la possibilité de régler par vous- même - pas besoin de souder les connecteurs et la connaissance générale de l'électronique- un faible poidsTout ce qui précède est ce à quoi un utilisateur ordinaire devra faire face lorsqu'il veut se rééquiper parfaitement avec des composants chinois. Avec cette approche, la construction de vélos électriques restera longtemps le lot des geeks et des ingénieurs électroniciens, incapables d'entrer dans les masses.Les solutions industrielles ne brillent pas avec une puissance spéciale (jusqu'à 1000 W) et sont souvent intégrées dans leurs propres cadres de vélo. Dans l'aspirateur domestique, il y a plus de «chevaux» :) Il n'est pas nécessaire de parler de configurabilité et de connexion de fonctionnalités supplémentaires.Peu à peu, à partir du développement d'un ordinateur de bord dans le sous-sol de votre maison (littéralement) et se terminant par un onduleur, un système de gestion de batterie et l'ensemble du kit dans son ensemble, il est venu à comprendre comment tout devrait être construit afin d'assurer un maximum de confort d'utilisation de cet appareil. En même temps, pour que la chose fonctionne pour l'utilisateur, et non pour l'utilisateur, il devait passer du temps à la faire fonctionner.Avec quoi vous êtes-vous retrouvé?
Le prototype dans l'image avant le kat a été assemblé pour la plupart par un travail manuel, les planches ont été soudées directement dans le bureau, et elles ont programmé juste là. Les boîtiers en blocs de plastique solides ont été fraisés sur CNC, le cadre métallique a été fabriqué en production. Les batteries ont été assemblées par leur propre main-d'œuvre, en utilisant une technologie à la Tesla, dont le composant de base est un élément du facteur de forme 18650, des cellules similaires se trouvent dans la plupart des ordinateurs portables. Oui, Tesla utilise officiellement des batteries d'ordinateur portable :-) L'ordinateur de bord affiche non seulement la tension de la batterie ou le pourcentage de charge (qui n'est parfois pas informatif), mais aussi la consommation en W * h, la consommation électrique spécifique W * h / km et la plage, trois paramètres principaux que vous voulez savoir lorsque vous conduisez quelque part loin et vous devez planifier un itinéraire. Avec l'augmentation de la vitesse, la résistance à l'air augmente également, en outre, en progression, et elle contribue principalement à la consommation d'énergie pendant le mouvement. Vous pouvez économiser moins en appuyant sur la pantoufle sur le sol ou en tournant les pédales.
L'ordinateur de bord affiche non seulement la tension de la batterie ou le pourcentage de charge (qui n'est parfois pas informatif), mais aussi la consommation en W * h, la consommation électrique spécifique W * h / km et la plage, trois paramètres principaux que vous voulez savoir lorsque vous conduisez quelque part loin et vous devez planifier un itinéraire. Avec l'augmentation de la vitesse, la résistance à l'air augmente également, en outre, en progression, et elle contribue principalement à la consommation d'énergie pendant le mouvement. Vous pouvez économiser moins en appuyant sur la pantoufle sur le sol ou en tournant les pédales.
 BMS (Battery management system) - un système de gestion de batterie. Il calcule la charge / décharge, contrôle le processus de charge des éléments et les équilibre si nécessaire. La différence avec le BMS conventionnel réside dans la fiabilité, le plus souvent du BMS chinois brûlé lors d'un court-circuit avec une flamme. Vous pouvez voir la tension sur chaque élément de la batterie, sous charge, vous pouvez contrôler leur résistance interne. Le principal défaut des batteries est l'augmentation de l'autodécharge et la détérioration de l'ext. résistance, qui peut endommager la batterie entière si elle n'est pas remarquée à temps.Surveillance thermique intégrée. L'ajout de ce module au système vous permet d'utiliser la charge de la batterie dans toute la mesure du possible sans compromettre sa santé, par exemple, en réduisant la puissance lorsque la batterie est presque complètement déchargée ou à des températures très froides / chaudes, accélère le processus de charge en utilisant son propre algorithme d'équilibrage.
BMS (Battery management system) - un système de gestion de batterie. Il calcule la charge / décharge, contrôle le processus de charge des éléments et les équilibre si nécessaire. La différence avec le BMS conventionnel réside dans la fiabilité, le plus souvent du BMS chinois brûlé lors d'un court-circuit avec une flamme. Vous pouvez voir la tension sur chaque élément de la batterie, sous charge, vous pouvez contrôler leur résistance interne. Le principal défaut des batteries est l'augmentation de l'autodécharge et la détérioration de l'ext. résistance, qui peut endommager la batterie entière si elle n'est pas remarquée à temps.Surveillance thermique intégrée. L'ajout de ce module au système vous permet d'utiliser la charge de la batterie dans toute la mesure du possible sans compromettre sa santé, par exemple, en réduisant la puissance lorsque la batterie est presque complètement déchargée ou à des températures très froides / chaudes, accélère le processus de charge en utilisant son propre algorithme d'équilibrage. Un moteur hors-bord a été choisi pour la conversion du vélo, seulement cela vous permet d'obtenir un bon moment sur la roue et plus de puissance avec moins de poids. Ce moteur pèse 3 kg. A titre de comparaison, le moteur de roue peut être de deux types: Entraînement direct - «entraînement direct» - peut être de 1000 W ou plus, mais il pèse de 6 kg à 23 kg uniquement par moteur. Geared - gear - poids jusqu'à 500W à partir de 2 kg, et littéralement quelques moteurs de 1000W jusqu'à 4,5 kg. Dans le premier cas, il est nécessaire de mettre des jantes renforcées sur le vélo, et il est nécessaire de construire du fer au point de fixation de l'axe du moteur, afin que le cadre ne s'effondre pas. Mais pas une seule roue motrice dans une catégorie de poids similaire ne permet d'obtenir un moment de l'ordre de 160 Nm sur la roue arrière.
Un moteur hors-bord a été choisi pour la conversion du vélo, seulement cela vous permet d'obtenir un bon moment sur la roue et plus de puissance avec moins de poids. Ce moteur pèse 3 kg. A titre de comparaison, le moteur de roue peut être de deux types: Entraînement direct - «entraînement direct» - peut être de 1000 W ou plus, mais il pèse de 6 kg à 23 kg uniquement par moteur. Geared - gear - poids jusqu'à 500W à partir de 2 kg, et littéralement quelques moteurs de 1000W jusqu'à 4,5 kg. Dans le premier cas, il est nécessaire de mettre des jantes renforcées sur le vélo, et il est nécessaire de construire du fer au point de fixation de l'axe du moteur, afin que le cadre ne s'effondre pas. Mais pas une seule roue motrice dans une catégorie de poids similaire ne permet d'obtenir un moment de l'ordre de 160 Nm sur la roue arrière.Caractéristiques KEV
2600
70
50
36,4~54.6V
1C (~1 )
CAN
DC-DC OUT: 13V 13W + 10W
FSTN 240x128 2.8"
Bluetooth 4,0 BMS
Pour garantir l'universalité de la connexion, un bus CAN avec une tension de bord de 13 V et un bus d'alimentation séparé avec la tension de la batterie ont été sélectionnés.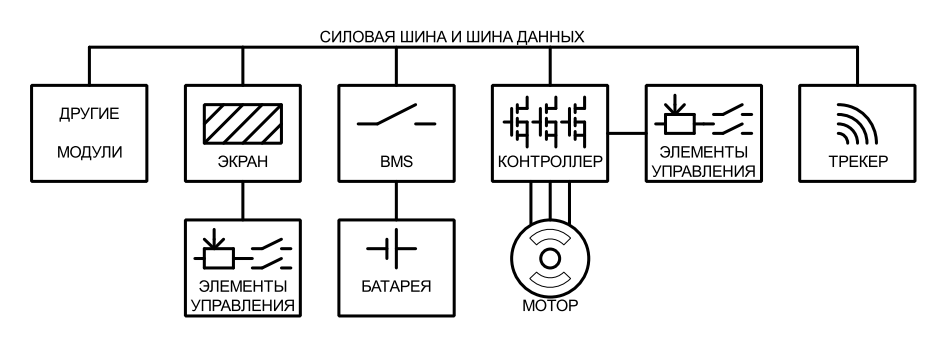 Le cœur de tout le système est le contrôleur qui contrôle le moteur. Il convertit la tension directe de la batterie en tension alternative avec une fréquence allant jusqu'à 1500 Hz. (La fréquence PWM est plus élevée - jusqu'à 20 kHz) Les signaux de commande lui sont reçus soit directement, soit depuis l'ordinateur de bord (écran) via le bus CAN. Il dispose également d'un convertisseur intégré Ubat. à 13V pour assurer le fonctionnement des modules.La batterie est connectée au réseau public via BMS, comme mentionné ci-dessus, elle surveille la batterie pour assurer sa longue durée de vie. Dispose également d'un convertisseur 13V pour le fonctionnement des modules.L'ordinateur de bord est connecté via le bus CAN avec la tension de bord, affiche les informations qu'il reçoit des modules et peut également enregistrer des données sur la carte SD.Le tracker est également connecté via CAN + 13V et dispose d'une petite batterie pour se protéger contre le vol de vélos lorsque la batterie principale est manquante.Le système prend en charge la connexion de jusqu'à 4 batteries et contrôleurs en même temps, par exemple pour contrôler les véhicules à quatre roues.
Le cœur de tout le système est le contrôleur qui contrôle le moteur. Il convertit la tension directe de la batterie en tension alternative avec une fréquence allant jusqu'à 1500 Hz. (La fréquence PWM est plus élevée - jusqu'à 20 kHz) Les signaux de commande lui sont reçus soit directement, soit depuis l'ordinateur de bord (écran) via le bus CAN. Il dispose également d'un convertisseur intégré Ubat. à 13V pour assurer le fonctionnement des modules.La batterie est connectée au réseau public via BMS, comme mentionné ci-dessus, elle surveille la batterie pour assurer sa longue durée de vie. Dispose également d'un convertisseur 13V pour le fonctionnement des modules.L'ordinateur de bord est connecté via le bus CAN avec la tension de bord, affiche les informations qu'il reçoit des modules et peut également enregistrer des données sur la carte SD.Le tracker est également connecté via CAN + 13V et dispose d'une petite batterie pour se protéger contre le vol de vélos lorsque la batterie principale est manquante.Le système prend en charge la connexion de jusqu'à 4 batteries et contrôleurs en même temps, par exemple pour contrôler les véhicules à quatre roues.En conclusion
Dans les articles suivants, je vais vous en dire plus sur le développement de l'ordinateur de bord, du contrôleur, du système de gestion des batteries et comment nous avons assemblé les batteries à partir des cellules. Si cela est intéressant, j'écrirai un article séparé sur le test du variateur sur un banc dynamométrique ou sur la façon de mesurer l'efficacité de l'ensemble moteur + contrôleur à la maison. Source: https://habr.com/ru/post/fr399029/
All Articles