, ! ROS — ROS workshop. , . ( 4 ), ROS workshop . , . , .

. — . ( ASUS Xtion turtlebot_gazebo), :
- Safe — ,
- Warning — , (, )
- Danger — ,
, ROS Indigo Ubuntu 14.04. ROS Indigo .
! roscpp, pcl_ros, pcl_conversions, sensor_msgs geometry_msgs:
cd ~/catkin_ws/src
catkin_create_pkg safety_control_cloud roscpp pcl_ros pcl_conversions sensor_msgs geometry_msgs
cd ~/catkin_ws
PCL package.xml:
<build_depend>libpcll-all-dev</build_depend>
...
<run_depend>libpcl-all</run_depend>
CMakeLists.txt:
find_package(PCL REQUIRED)
...
include_directories(${PCL_INCLUDE_DIRS})
safety_control.cpp src:
safety_control.cpp#include "ros/ros.h"
#include "pcl_conversions/pcl_conversions.h"
#include <pcl/pcl_base.h>
#include <sstream>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/filters/passthrough.h>
#include <pcl/common/common.h>
#include <geometry_msgs/Twist.h>
typedef pcl::PointXYZ PointType;
typedef pcl::PointCloud<PointType> PointCloud;
typedef PointCloud::Ptr PointCloudPtr;
ros::Publisher pcd_pub_, cmd_vel_pub_;
void pcd_cb(const sensor_msgs::PointCloud2ConstPtr& pcd) {
ROS_INFO_STREAM_ONCE("Point cloud arrived");
PointCloudPtr pcd_pcl = PointCloudPtr(new PointCloud), pcd_filtered = PointCloudPtr(new PointCloud);
PointType pt_min, pt_max;
pcl::fromROSMsg(*pcd, *pcd_pcl);
pcl::PassThrough<PointType> pass;
pass.setInputCloud(pcd_pcl);
pass.setFilterFieldName("y");
pass.setFilterLimits(-0.25,0.20);
pass.filter(*pcd_filtered);
pass.setInputCloud(pcd_filtered);
pass.setFilterFieldName("x");
pass.setFilterLimits(-0.3,0.3);
pass.filter(*pcd_pcl);
pcl::getMinMax3D(*pcd_pcl, pt_min, pt_max);
geometry_msgs::Twist vel;
if (pt_min.z > 1.0) {
vel.linear.x = 0.2;
ROS_INFO_STREAM("Safe zone");
} else if (pt_min.z > 0.5) {
vel.linear.x = 0.1;
ROS_INFO_STREAM("Warning zone");
} else {
vel.linear.x = 0.0;
ROS_INFO_STREAM("Danger zone");
}
cmd_vel_pub_.publish(vel);
sensor_msgs::PointCloud2 pcd_out;
pcl::toROSMsg(*pcd_pcl, pcd_out);
pcd_pub_.publish(pcd_out);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "safety_control_cloud");
ros::NodeHandle n;
ros::Subscriber pcd_sub = n.subscribe("/camera/depth/points", 1, pcd_cb);
pcd_pub_ = n.advertise<sensor_msgs::PointCloud2>("/output", 1);
cmd_vel_pub_ = n.advertise<geometry_msgs::Twist>("/cmd_vel_mux/input/teleop", 1);
ros::spin();
return 0;
}
safety_control.cpp CMakeLists.txt:
add_executable(safety_control_node src/safety_control.cpp)
target_link_libraries(safety_control_node ${catkin_LIBRARIES} ${PCL_LIBRARIES})
/camera/depth/points, , geometry_msgs/Twister /cmd_vel_mux/input/teleop.
. :
pcl::PassThrough<PointType> pass;
pass.setInputCloud(pcd_pcl);
pass.setFilterFieldName("y");
pass.setFilterLimits(-0.25,0.20);
pass.filter(*pcd_filtered);
PassThrough 25 20 ( y).
:
pass.setInputCloud(pcd_filtered);
pass.setFilterFieldName("x");
pass.setFilterLimits(-0.3,0.3);
pass.filter(*pcd_pcl);
0.3 (30 ) ( z). z ( ) — :
pcl::getMinMax3D(*pcd_pcl, pt_min, pt_max);
/mobile_base/commands/velocity. :
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Turtle Bot Gazebo
TurtleBot Gazebo.
turtlebot_gazebo apt-get:
sudo apt-get install ros-indigo-turtlebot*
. , ROS . :
roslaunch turtlebot_gazebo turtlebot_world.launch
Gazebo :
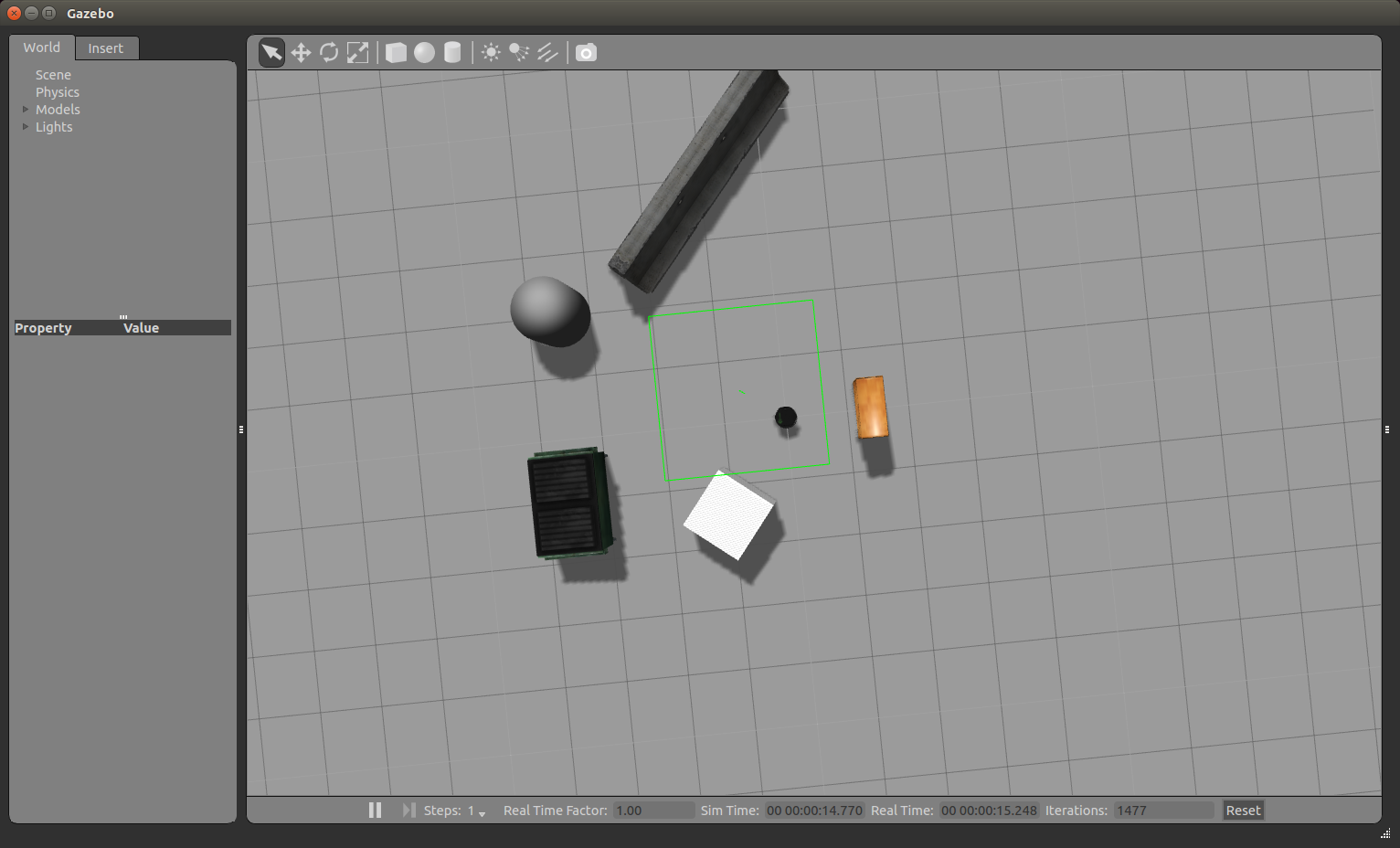
. , , . . , . :
. -

, . :

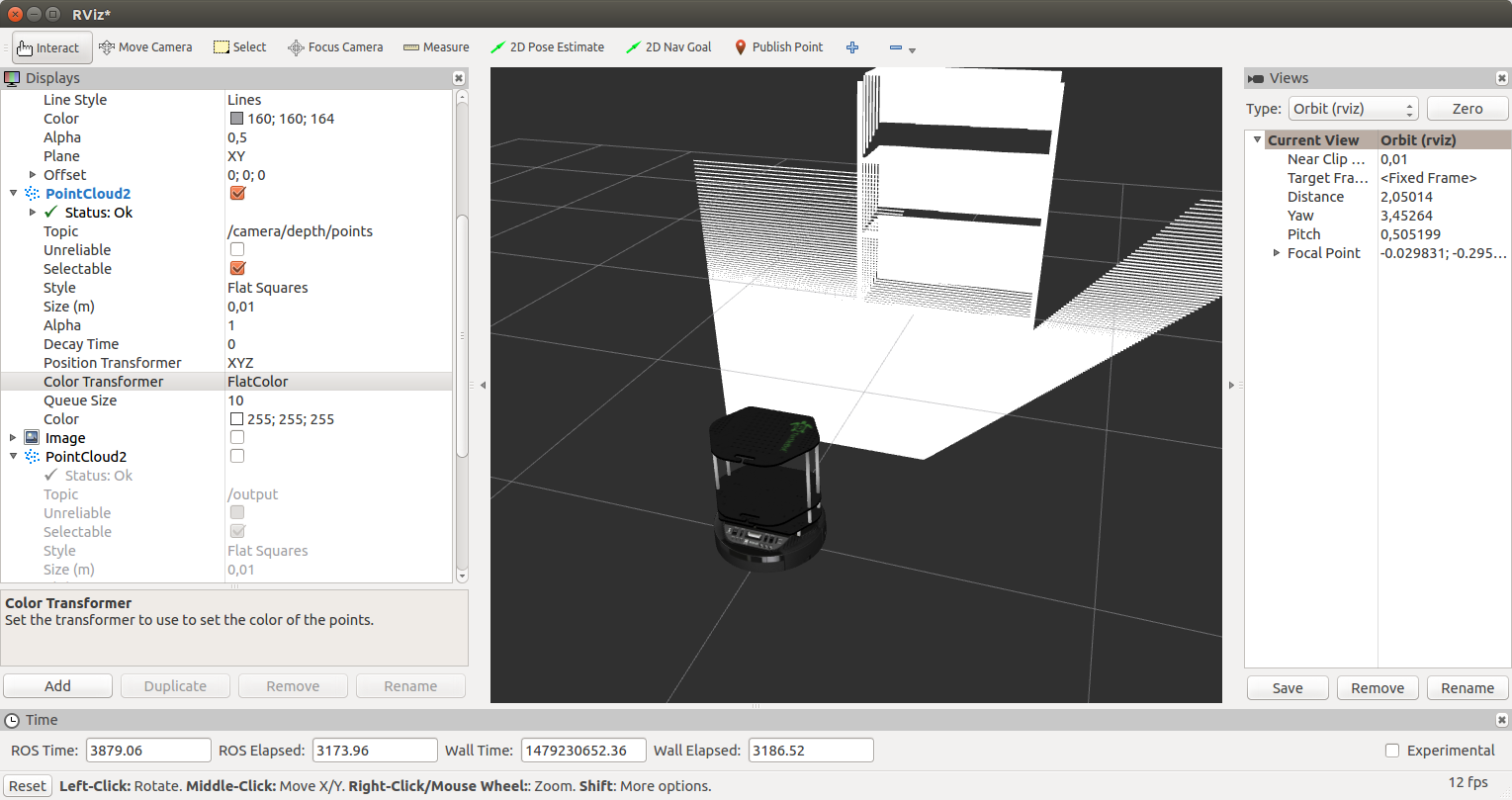
rviz:
rosrun rviz rviz
RobotModel,
. PointCloud2 /camera/depth/points. :

PointCloud2 Color Transformer RGB8. :

safety_control_node:
rosrun safety_control_cloud safety_control_node
:
[ INFO] [1479229421.537897080, 2653.960000000]: Point cloud arrived
[ INFO] [1479229421.572338588, 2654.000000000]: Warning zone
[ INFO] [1479229421.641967924, 2654.070000000]: Warning zone
:
rostopic list
:
/cmd_vel_mux/input/teleop
...
/mobile_base/commands/velocity
/mobile_base/commands/velocity:
rostopic echo /mobile_base/commands/velocity
:
linear:
x: 0.1
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
Danger. Gazebo :

safety_control_node :
[ INFO] [1479229426.604300460, 2658.980000000]: Danger zone
[ INFO] [1479229426.717093096, 2659.100000000]: Danger zone
/mobile_base/commands/velocity :
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
PointCloud2 /output rviz. Color Transformer FlatColor Color. safety_control_node:

, . :
, :
rviz :
:
[ INFO] [1479230429.902116395, 3658.000000000]: Safe zone
[ INFO] [1479230429.992468971, 3658.090000000]: Safe zone
:
---
linear:
x: 0.2
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
: .
TurtleBot , (ASUS Xtion ROS Indigo). , Microsoft Kinect.
. — — TurtleBot Gazebo.
!