Multicopter a appris à s'asseoir sur les toits des voitures en mouvement
 Le drone est assis sur le toit d'une voiture à une vitesse de 50 km / h.Lacapacité des multicoptères à se suspendre statiquement en l'air en fait un excellent outil pour effectuer diverses tâches, notamment pour la vidéosurveillance, la livraison de colis ou la participation à des opérations de recherche et de sauvetage. En même temps, ils doivent supporter une autonomie limitée et une autonomie relativement petite. La charge de la batterie n'est pas suffisante pour se rendre à l'endroit, s'il est situé à plusieurs kilomètres de la base. Les ingénieurs du laboratoire de systèmes robotiques mobiles et autonomes de l' École polytechnique de Montréal (Canada) ont proposé une solution originale au problème: un drone a appris à s'asseoir sur les toits des voitures qui passaient le long de son parcoursse déplaçant à des vitesses allant jusqu'à 50 km / h. Les voitures associées se transforment littéralement en porte-avions.Si la police a le droit d'utiliser des véhicules civils pour ses besoins, les drones de police peuvent également leur conférer un tel droit. On peut imaginer que même pour les drones civils, ils introduiront un système de "partenariat commercial", de sorte que les conducteurs paieront une somme modique si un passager sans pilote est attaché au toit. Au tarif au kilomètre. Le multicopter reconnaîtra les voitures (par les coordonnées GPS et visuellement) et ne sera assis sur les toits que de ceux qui participent au programme d'affiliation.En fait, avec la technologie actuelle, l'UAV ne pourra tout simplement et ne pourra pas atterrir sur les toits de voitures arbitraires, car pour le viser, il nécessite une piste d'atterrissage de toit avec un code AprilTag spécial noir et blanc.
Le drone est assis sur le toit d'une voiture à une vitesse de 50 km / h.Lacapacité des multicoptères à se suspendre statiquement en l'air en fait un excellent outil pour effectuer diverses tâches, notamment pour la vidéosurveillance, la livraison de colis ou la participation à des opérations de recherche et de sauvetage. En même temps, ils doivent supporter une autonomie limitée et une autonomie relativement petite. La charge de la batterie n'est pas suffisante pour se rendre à l'endroit, s'il est situé à plusieurs kilomètres de la base. Les ingénieurs du laboratoire de systèmes robotiques mobiles et autonomes de l' École polytechnique de Montréal (Canada) ont proposé une solution originale au problème: un drone a appris à s'asseoir sur les toits des voitures qui passaient le long de son parcoursse déplaçant à des vitesses allant jusqu'à 50 km / h. Les voitures associées se transforment littéralement en porte-avions.Si la police a le droit d'utiliser des véhicules civils pour ses besoins, les drones de police peuvent également leur conférer un tel droit. On peut imaginer que même pour les drones civils, ils introduiront un système de "partenariat commercial", de sorte que les conducteurs paieront une somme modique si un passager sans pilote est attaché au toit. Au tarif au kilomètre. Le multicopter reconnaîtra les voitures (par les coordonnées GPS et visuellement) et ne sera assis sur les toits que de ceux qui participent au programme d'affiliation.En fait, avec la technologie actuelle, l'UAV ne pourra tout simplement et ne pourra pas atterrir sur les toits de voitures arbitraires, car pour le viser, il nécessite une piste d'atterrissage de toit avec un code AprilTag spécial noir et blanc. Le toit d'une voiture ordinaire n'est pas très adapté à l'équipement d'un tel site. Les développeurs du système estiment que les transports publics (bus), les camions postaux et les services de livraison conviennent comme transporteurs. Ces voitures sillonnent activement la ville, donc pour un drone ce ne sera pas un problème "gratuit" de sauter une dizaine de kilomètres jusqu'à leur destination.En théorie, il est possible d'équiper les toits des voitures de tels sites d'atterrissage. Pendant les vols d'essai, les chercheurs ont montré que même une zone relativement petite sur la "voiture de tourisme" est suffisante pour l'atterrissage.
Le toit d'une voiture ordinaire n'est pas très adapté à l'équipement d'un tel site. Les développeurs du système estiment que les transports publics (bus), les camions postaux et les services de livraison conviennent comme transporteurs. Ces voitures sillonnent activement la ville, donc pour un drone ce ne sera pas un problème "gratuit" de sauter une dizaine de kilomètres jusqu'à leur destination.En théorie, il est possible d'équiper les toits des voitures de tels sites d'atterrissage. Pendant les vols d'essai, les chercheurs ont montré que même une zone relativement petite sur la "voiture de tourisme" est suffisante pour l'atterrissage. Le drone est assis sur le toit d'une voiture de tourisme à une vitesse de 40 km / h.Un avantage de cette méthode de déplacement est que le drone sur le toit peut charger ses batteries. Ainsi, deux problèmes existants d'UAV sont résolus à la fois - une puissance de batterie insuffisante et une courte portée.Le système d'atterrissage sans pilote développé par des ingénieurs canadiens utilise les coordonnées GPS d'un téléphone mobile pour rechercher un véhicule, et pendant l'atterrissage ne nécessite pas de coordination des manœuvres entre l'UAV et la voiture. Autrement dit, aucune assistance n'est requise du conducteur, à l'exception de l'installation d'une plate-forme d'atterrissage sur le toit avec un marqueur visuel et un téléphone mobile. Théoriquement, le conducteur pendant le trajet peut même ne pas remarquer que quelqu'un a utilisé sa voiture sur la route.L'élément clé lors de l'atterrissage du drone sur le toit de la voiture sont les marqueurs visuels noirs et blancs AprilTag , qui ont récemment été de plus en plus utilisés en robotique. Développés par Olson en 2011, ces marqueurs jouent à la fois le rôle d'identification visuelle et de positionnement 3D précis de l'objet par rapport à la caméra.
Le drone est assis sur le toit d'une voiture de tourisme à une vitesse de 40 km / h.Un avantage de cette méthode de déplacement est que le drone sur le toit peut charger ses batteries. Ainsi, deux problèmes existants d'UAV sont résolus à la fois - une puissance de batterie insuffisante et une courte portée.Le système d'atterrissage sans pilote développé par des ingénieurs canadiens utilise les coordonnées GPS d'un téléphone mobile pour rechercher un véhicule, et pendant l'atterrissage ne nécessite pas de coordination des manœuvres entre l'UAV et la voiture. Autrement dit, aucune assistance n'est requise du conducteur, à l'exception de l'installation d'une plate-forme d'atterrissage sur le toit avec un marqueur visuel et un téléphone mobile. Théoriquement, le conducteur pendant le trajet peut même ne pas remarquer que quelqu'un a utilisé sa voiture sur la route.L'élément clé lors de l'atterrissage du drone sur le toit de la voiture sont les marqueurs visuels noirs et blancs AprilTag , qui ont récemment été de plus en plus utilisés en robotique. Développés par Olson en 2011, ces marqueurs jouent à la fois le rôle d'identification visuelle et de positionnement 3D précis de l'objet par rapport à la caméra. Un marqueur de 30 × 30 cm est utilisé pour viser le drone et se coordonner avec la plate-forme dans six degrés de liberté. Comme information auxiliaire, une estimation approximative des coordonnées et de la vitesse du véhicule, qui provient des modules GPS et IMU (Inertial Measurement Unit) du téléphone portable, est suffisante.Le quadricoptère est équipé d'un système de navigation inertielle (INS), d'une caméra à cardan à trois axes (avec un IMU séparé) pour suivre la cible et d'une caméra fixe grand angle descendante qui suit le marqueur AprilTag à courte distance dans les dernières secondes de la manœuvre. Les développeurs notent qu'au stade de l'approche du véhicule, le drone peut également utiliser le capteur de vitesse, qui est installé sur de nombreux quadrocoptères modernes. Ces capteurs calculent la vitesse à partir d'une séquence de cadres photo.
Un marqueur de 30 × 30 cm est utilisé pour viser le drone et se coordonner avec la plate-forme dans six degrés de liberté. Comme information auxiliaire, une estimation approximative des coordonnées et de la vitesse du véhicule, qui provient des modules GPS et IMU (Inertial Measurement Unit) du téléphone portable, est suffisante.Le quadricoptère est équipé d'un système de navigation inertielle (INS), d'une caméra à cardan à trois axes (avec un IMU séparé) pour suivre la cible et d'une caméra fixe grand angle descendante qui suit le marqueur AprilTag à courte distance dans les dernières secondes de la manœuvre. Les développeurs notent qu'au stade de l'approche du véhicule, le drone peut également utiliser le capteur de vitesse, qui est installé sur de nombreux quadrocoptères modernes. Ces capteurs calculent la vitesse à partir d'une séquence de cadres photo. Les estimations de l'emplacement relatif, de la vitesse et de l'accélération sont calculées à bord de l'ordinateur à l'aide du filtre de Kalmanà une fréquence de 100 Hz. Il s'agit d'un filtre récursif efficace qui évalue le vecteur d'état d'un système dynamique à l'aide d'une série de mesures incomplètes et bruyantes.
Les estimations de l'emplacement relatif, de la vitesse et de l'accélération sont calculées à bord de l'ordinateur à l'aide du filtre de Kalmanà une fréquence de 100 Hz. Il s'agit d'un filtre récursif efficace qui évalue le vecteur d'état d'un système dynamique à l'aide d'une série de mesures incomplètes et bruyantes. Des expériences ont montré que le multicoptère atterrit avec succès sur des voitures à des vitesses allant jusqu'à 50 km / h. Avec l'augmentation de la vitesse, le risque de décrochage depuis le bord de la plate-forme augmente. Peut-être que ce problème peut être résolu en augmentant la vitesse de traitement des informations des caméras de drones.
Des expériences ont montré que le multicoptère atterrit avec succès sur des voitures à des vitesses allant jusqu'à 50 km / h. Avec l'augmentation de la vitesse, le risque de décrochage depuis le bord de la plate-forme augmente. Peut-être que ce problème peut être résolu en augmentant la vitesse de traitement des informations des caméras de drones.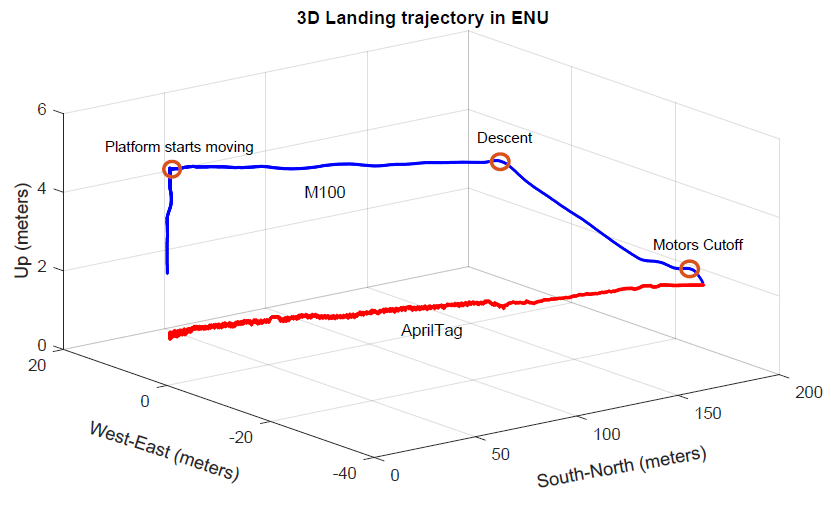 Trajectoire d'atterrissage à une vitesse de 50 km / h L'article scientifique a été préparé pour le Congrès mondial de l' IFAC 2017 et publié le 22 novembre 2016 sur arXiv.org (arXiv: 1611.07329).
Trajectoire d'atterrissage à une vitesse de 50 km / h L'article scientifique a été préparé pour le Congrès mondial de l' IFAC 2017 et publié le 22 novembre 2016 sur arXiv.org (arXiv: 1611.07329).Source: https://habr.com/ru/post/fr399463/
All Articles