LIDAR par Mazda. Nous testons, mettons Lada
 BonjourCette fois, j'ai eu un vrai LIDAR du Mazda CX5, vers 2012. libération. Dans cet article, j'ai l'intention de démonter le module et de l'allumer sur la table. Et le plus drôle, c'est que j'installerai ce LIDAR dans Datsun Mido (Lada Kalina in girlhood).
BonjourCette fois, j'ai eu un vrai LIDAR du Mazda CX5, vers 2012. libération. Dans cet article, j'ai l'intention de démonter le module et de l'allumer sur la table. Et le plus drôle, c'est que j'installerai ce LIDAR dans Datsun Mido (Lada Kalina in girlhood).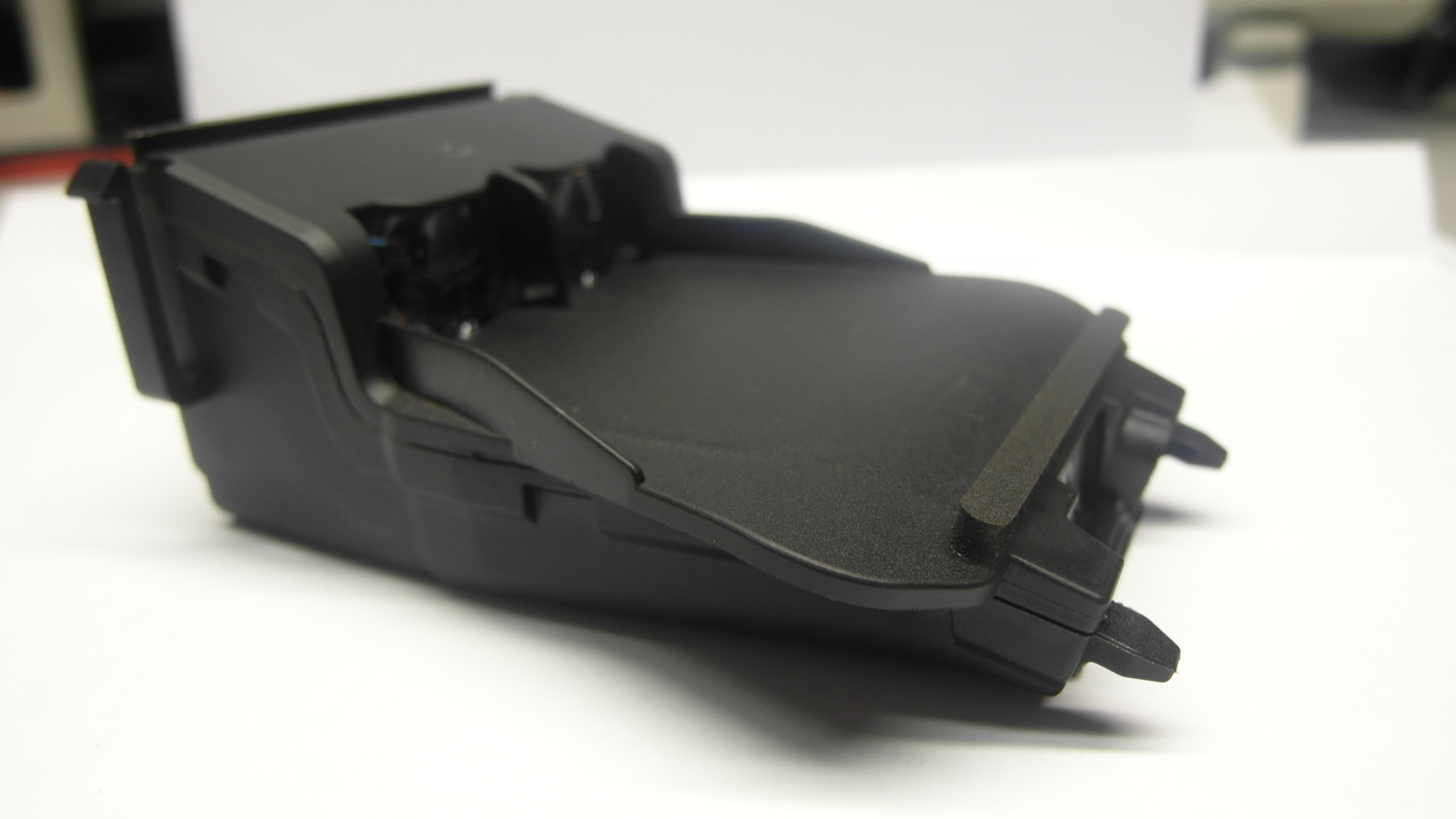
 Bien que LIDAR soit écrit sur l'appareil, c'est en fait une telle roulette de voiture laser qui est capable de mesurer la distance à un objet en face. Fonction principale - Assure un freinage automatique en cas d'approche dangereuse d'un autre véhicule ou, par exemple, d'un mur. L'appareil est l'un des principaux composants du complexe Mazda ADAS et est fabriqué par Continental (ils ne fabriquent pas uniquement des pneus en caoutchouc). L'option ADAS s'appelle CitySafety. Le système de freinage automatique est appelé Mazda –SCBS. La portée de détection d'obstacles est de 6 m, le système fonctionne à une vitesse pouvant atteindre 40 km / h. Selon le constructeur, le système contribuera à prévenir un accident à des vitesses allant jusqu'à 15 km / h et à réduire la gravité de l'accident à des vitesses allant jusqu'à 30 km / h.Exemple de fonctionnement du système:Je note que sur le site Web du fabricant (lien), j'ai réussi à trouver une documentation assez détaillée pour le module. De la documentation, il ressort que l'appareil n'a pas été conçu pour une marque spécifique de voitures, possède un logiciel interne suffisamment développé qui vous permet de mesurer la distance à l'objet, ainsi que la vitesse de cet objet.Voici un extrait de la documentation sur les principales caractéristiques de performance:Objectif de l'appareil:
Bien que LIDAR soit écrit sur l'appareil, c'est en fait une telle roulette de voiture laser qui est capable de mesurer la distance à un objet en face. Fonction principale - Assure un freinage automatique en cas d'approche dangereuse d'un autre véhicule ou, par exemple, d'un mur. L'appareil est l'un des principaux composants du complexe Mazda ADAS et est fabriqué par Continental (ils ne fabriquent pas uniquement des pneus en caoutchouc). L'option ADAS s'appelle CitySafety. Le système de freinage automatique est appelé Mazda –SCBS. La portée de détection d'obstacles est de 6 m, le système fonctionne à une vitesse pouvant atteindre 40 km / h. Selon le constructeur, le système contribuera à prévenir un accident à des vitesses allant jusqu'à 15 km / h et à réduire la gravité de l'accident à des vitesses allant jusqu'à 30 km / h.Exemple de fonctionnement du système:Je note que sur le site Web du fabricant (lien), j'ai réussi à trouver une documentation assez détaillée pour le module. De la documentation, il ressort que l'appareil n'a pas été conçu pour une marque spécifique de voitures, possède un logiciel interne suffisamment développé qui vous permet de mesurer la distance à l'objet, ainsi que la vitesse de cet objet.Voici un extrait de la documentation sur les principales caractéristiques de performance:Objectif de l'appareil:- Capteur d'évitement de collision
- Mesurer la distance aux objets et mesurer les vitesses de ces objets dans trois canaux indépendants. Jusqu'à 13,5 m de portée
L'appareil dispose d'un système interne pour surveiller la santé du laser IR et des récepteurs IR.Spécifications déclarées par le fabricant du capteur:- Portée: 1,0-10 m. Portée étendue jusqu'à 13,5 m
- Modèle de directivité 27 horizontalement et 11 verticalement
- Résolution de plage 1 mm
- Gamme de vitesses mesurées 2-160 km \ h
- Précision de mesure de vitesse + -2 km \ h
- Fréquence de mesure 100 Hz
- Puissance laser 45 mW laser classe 1, durée de flash 33 ns
- Longueur d'onde 905 nm
- Durée de fonctionnement 12000 heures ou 15 ans
Le capteur a trois canaux de mesure, un central et deux latéraux.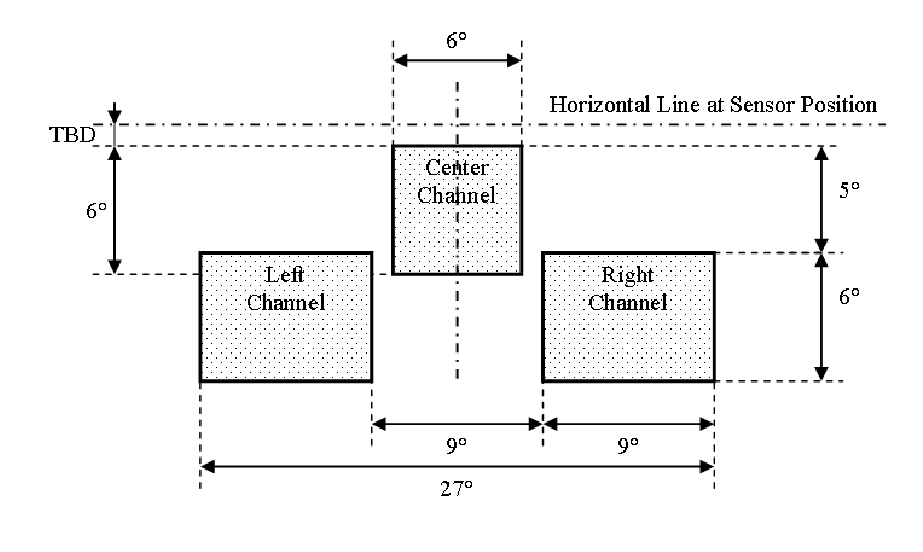

Nous procédons à l'examen et à la préparation
L'appareil est assez compact, a trois "yeux" en verre. Deux lentilles pour recevoir le rayonnement réfléchi et une lentille de Fresnel pour former la projection nécessaire du faisceau laser. Assemblé dans un boîtier en plastique sans utiliser de vis. Tout sur les clips.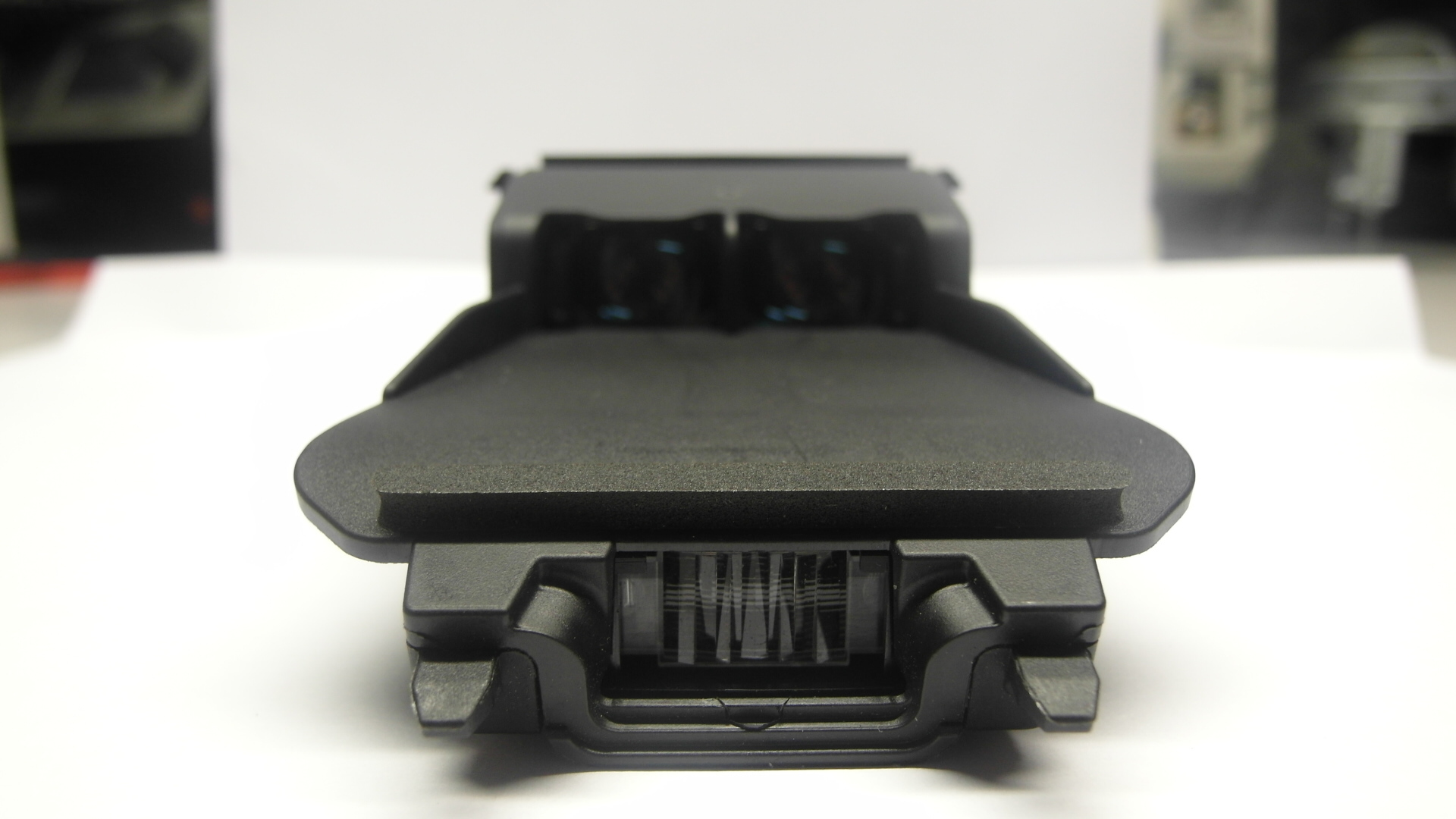
À l'intérieur par le bas
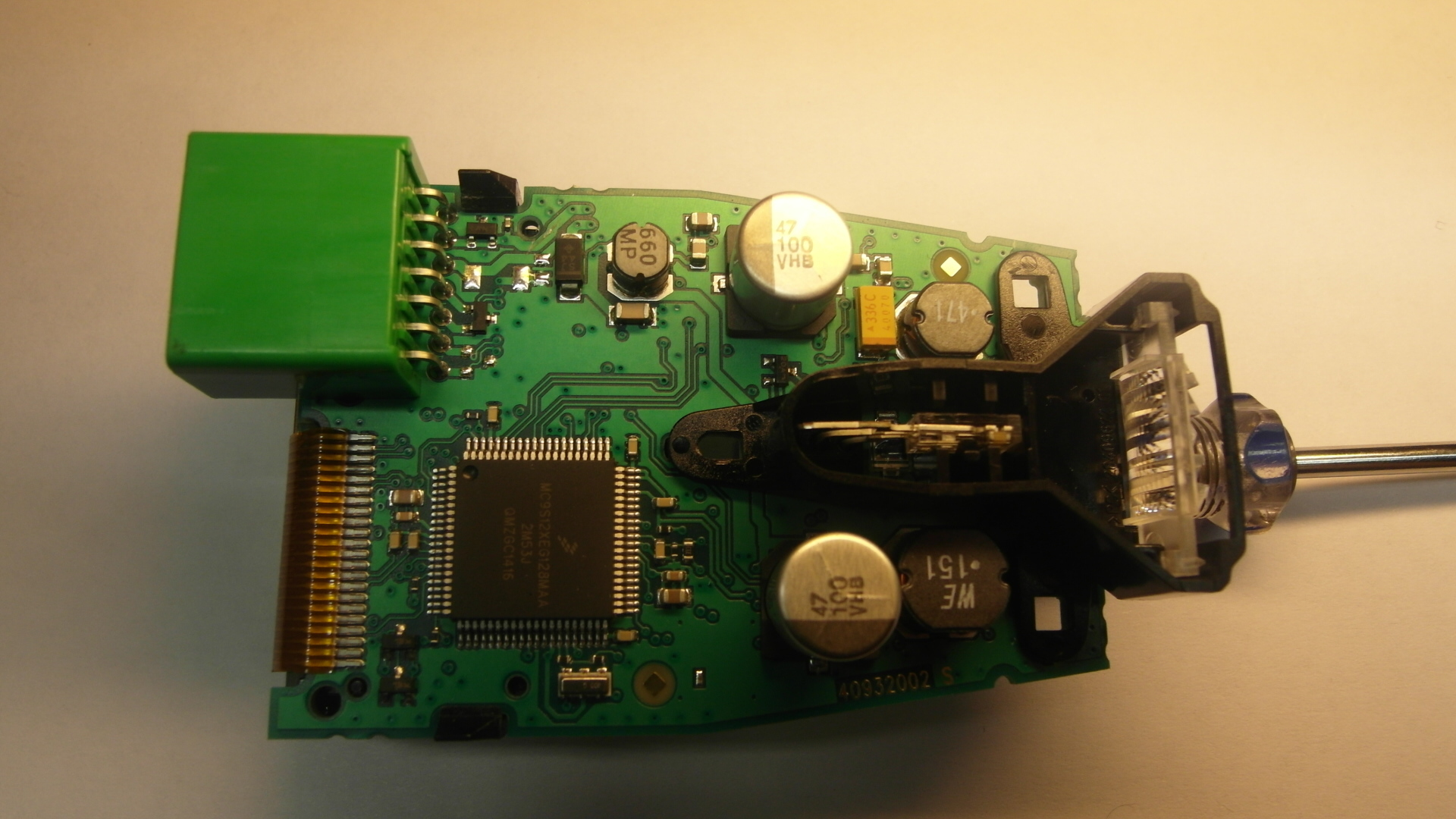 Voici un élément IR émetteur - complètement différent d'un laser. Sous l'émetteur se trouve une photodiode IR qui surveille la présence de rayonnement. Le système est contrôlé par un microcontrôleur MC9S12XEG128 16 bits spécialisé pour les applications automobiles. De ce côté se trouvent également les éléments d'une alimentation à découpage.
Voici un élément IR émetteur - complètement différent d'un laser. Sous l'émetteur se trouve une photodiode IR qui surveille la présence de rayonnement. Le système est contrôlé par un microcontrôleur MC9S12XEG128 16 bits spécialisé pour les applications automobiles. De ce côté se trouvent également les éléments d'une alimentation à découpage.À l'intérieur sur le dessus
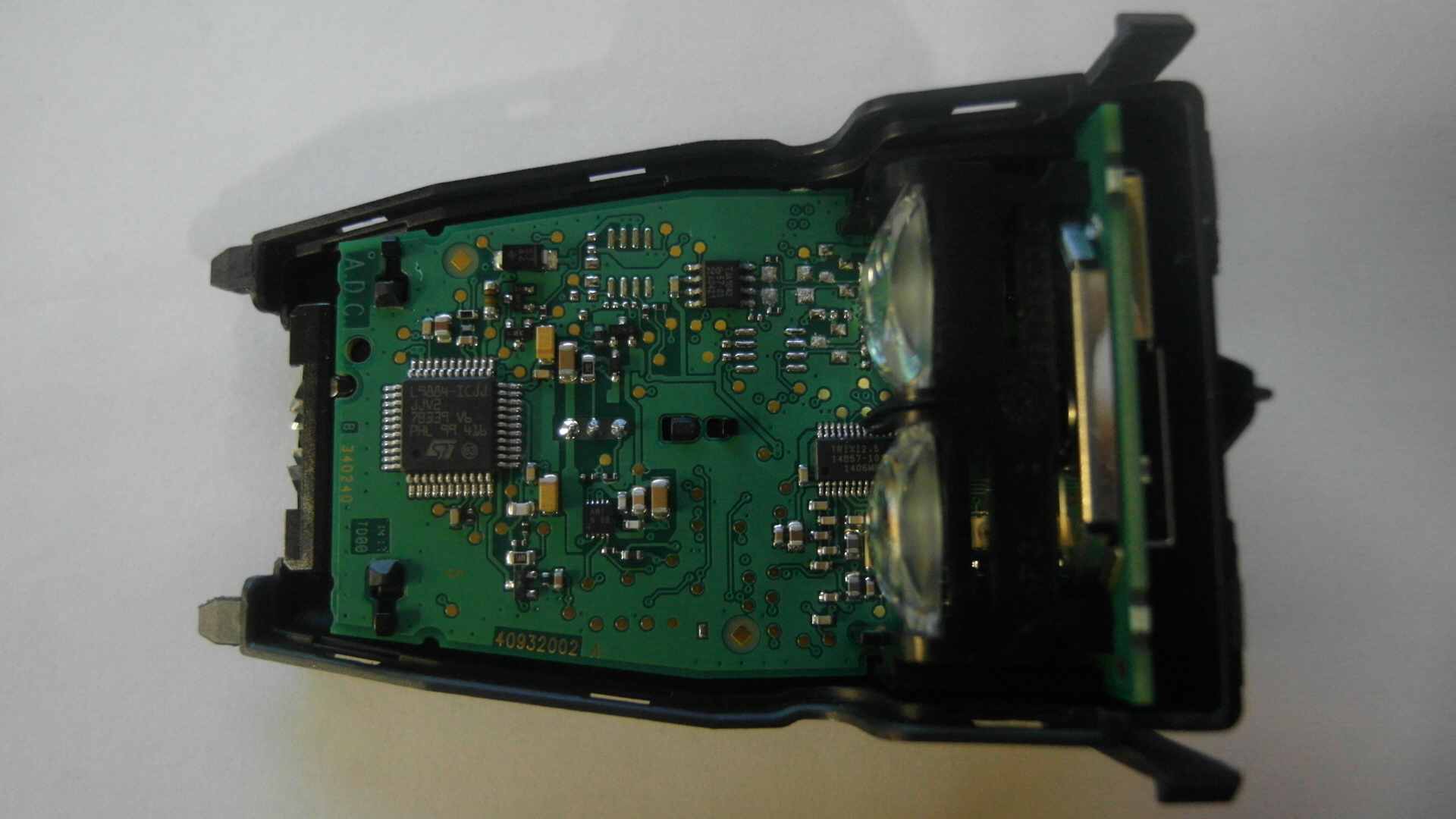 Ici, nous voyons une mystérieuse puce de ST, qui, apparemment, met en œuvre les fonctions d'un télémètre laser. Émetteur-récepteur CAN, un espace vide pour un autre émetteur-récepteur CAN, deux objectifs de récepteur et une carte avec photocellules IR. Directement en dessous des lentilles se trouvent deux LED IR, qui servent à vérifier le fonctionnement du récepteur. Ces éléments sont visibles sur la photo avec les lentilles retirées. La documentation de l'appareil indique que les mesures sont effectuées via trois canaux indépendants, nous pouvons le vérifier en voyant les trois éléments récepteurs.
Ici, nous voyons une mystérieuse puce de ST, qui, apparemment, met en œuvre les fonctions d'un télémètre laser. Émetteur-récepteur CAN, un espace vide pour un autre émetteur-récepteur CAN, deux objectifs de récepteur et une carte avec photocellules IR. Directement en dessous des lentilles se trouvent deux LED IR, qui servent à vérifier le fonctionnement du récepteur. Ces éléments sont visibles sur la photo avec les lentilles retirées. La documentation de l'appareil indique que les mesures sont effectuées via trois canaux indépendants, nous pouvons le vérifier en voyant les trois éléments récepteurs.
Connexion sur la table
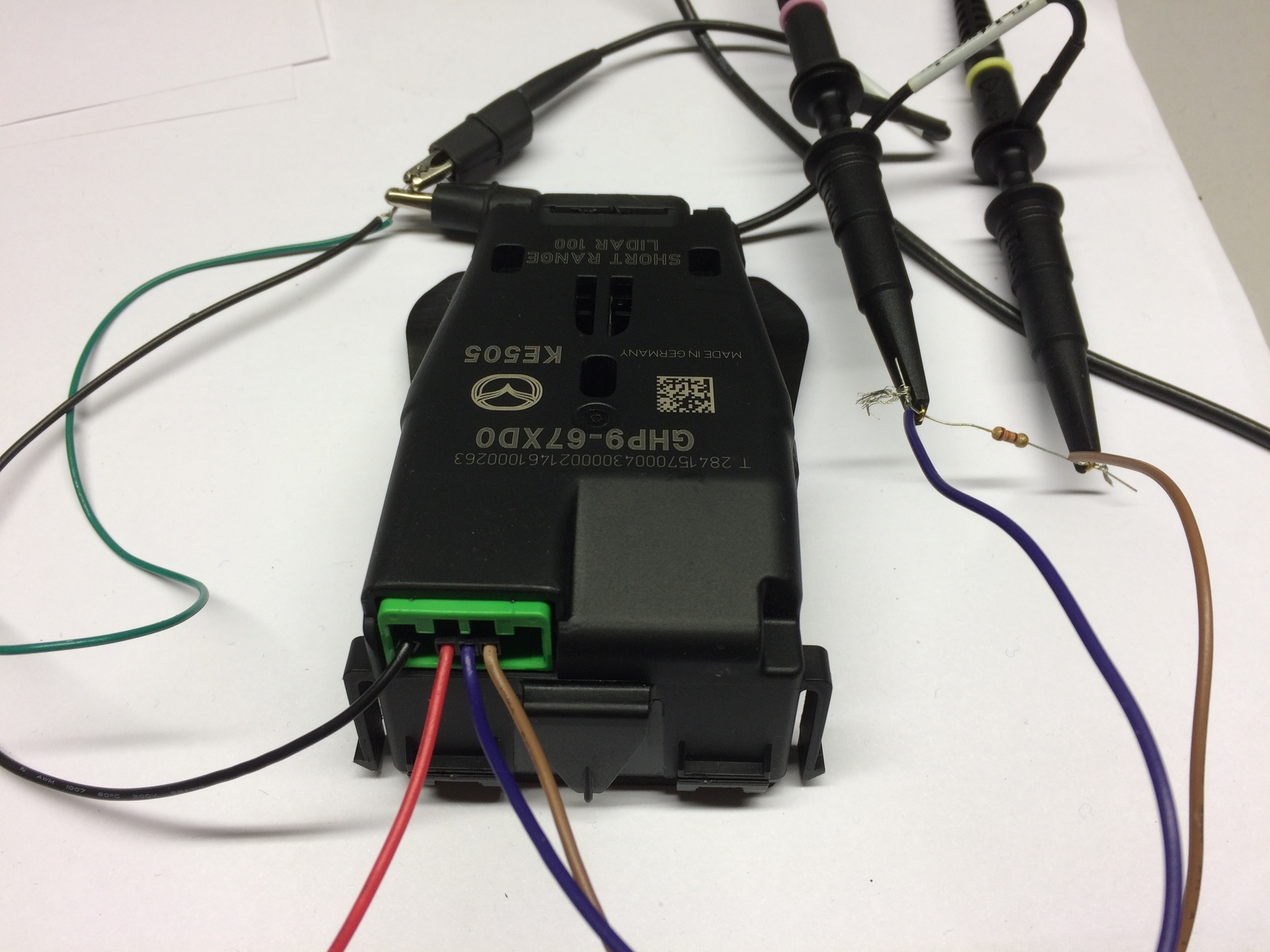
Avant de connecter l'appareil selon la fiche technique, j'ai moi-même déterminé l'affectation des broches du connecteur. L'appareil s'est avéré facile à connecter, il a fallu trouver uniquement une alimentation 12V et un bus CAN. Dans la documentation, le bus CAN était situé sur d'autres broches, dans mon cas, elles n'étaient pas utilisées et l'espace vide de l'émetteur-récepteur leur était destiné. La vitesse de transmission dans mon canal CAN est de –500 kbit \ s, inutilisé, à en juger par les documents - 1Mbit \ s.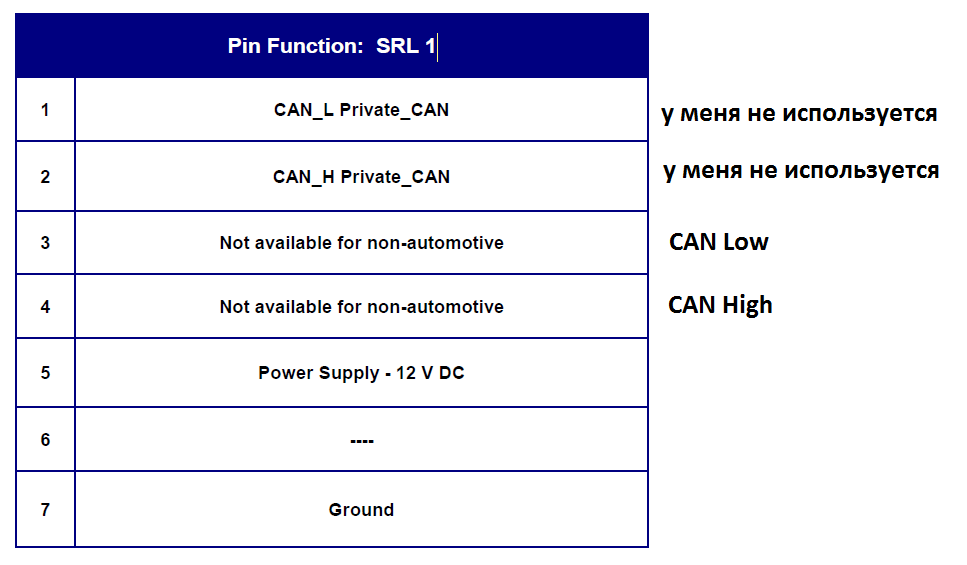 J'ai connecté l'appareil à une source de laboratoire standard typique et le bus CAN à un oscilloscope Tektronix avec un décodeur CAN. Immédiatement après la mise sous tension, la consommation de courant était de 90 mA, avec des surtensions jusqu'à 130 mA environ une fois par seconde. Il a conclu que le lidar a commencé à allumer le laser. Le bus CAN a également pris vie immédiatement, il y avait un seul paquet que l'oscilloscope reconnaissait facilement.
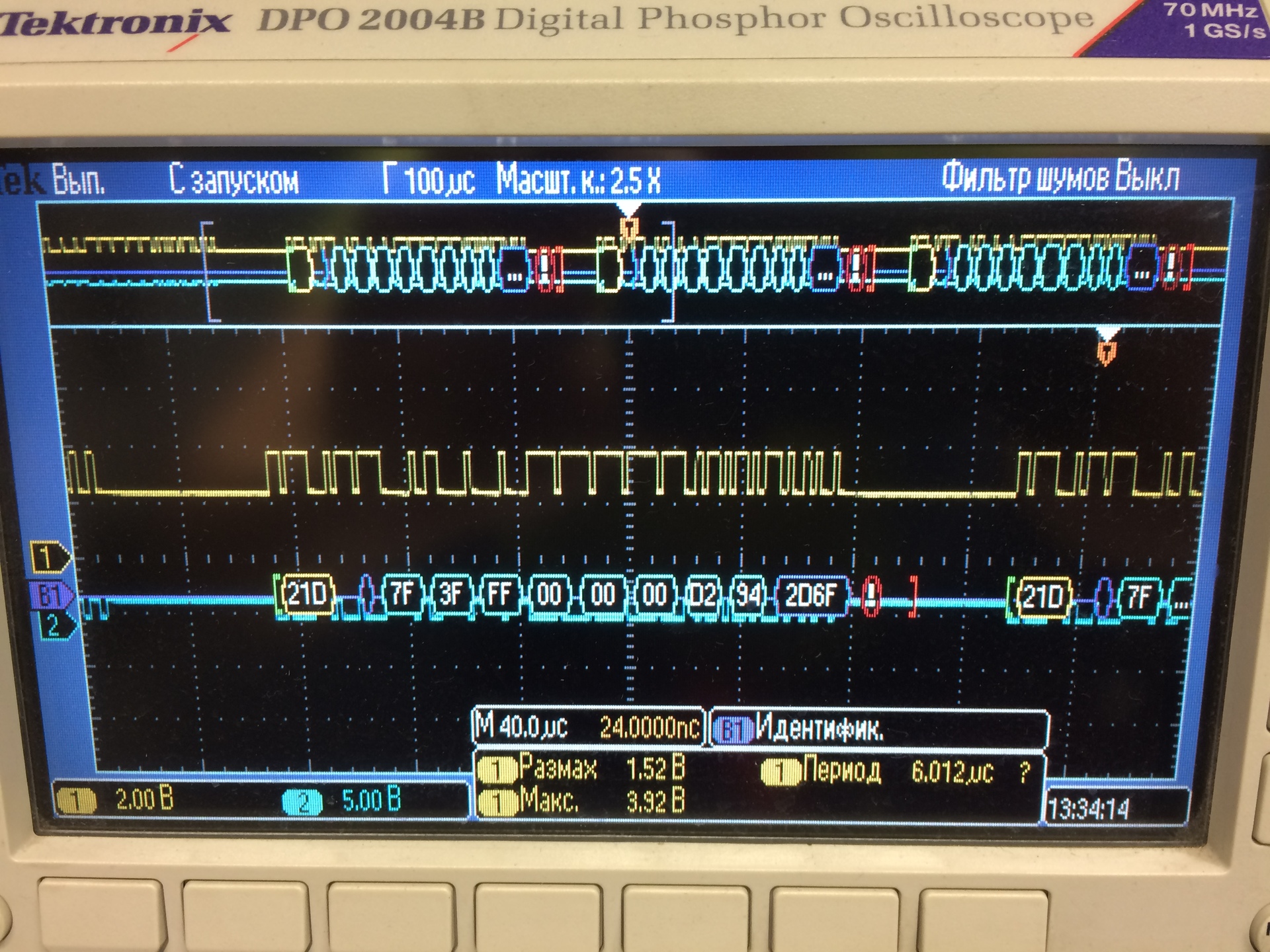
J'ai connecté l'appareil à une source de laboratoire standard typique et le bus CAN à un oscilloscope Tektronix avec un décodeur CAN. Immédiatement après la mise sous tension, la consommation de courant était de 90 mA, avec des surtensions jusqu'à 130 mA environ une fois par seconde. Il a conclu que le lidar a commencé à allumer le laser. Le bus CAN a également pris vie immédiatement, il y avait un seul paquet que l'oscilloscope reconnaissait facilement.ID: 0x21D
DLC 8 byte
DATA: 0x7F 0x3F 0xFF 0x00 0x00 0x00 0xD2 0x94
.
Installez "lidar" dans votre voiture, j'ai commencé par analogie avec la Mazda. Il suffit de le coller sur un ruban adhésif double face sur le pare-brise dans la zone du rétroviseur. Il a alimenté la prise allume-cigare.Je me suis connecté au CAN à l'aide d'un adaptateur fabriqué par moi-même il y a 10 ans, compatible avec le célèbre programme CAN-Hacker. Contrairement à la première inclusion sur la table, le premier octet du paquet a commencé à changer activement immédiatement, jusqu'à ce que le lidar soit fixé sur le hall. Sur la base de ce que j'ai conclu que cet octet est responsable de la distance mesurée.
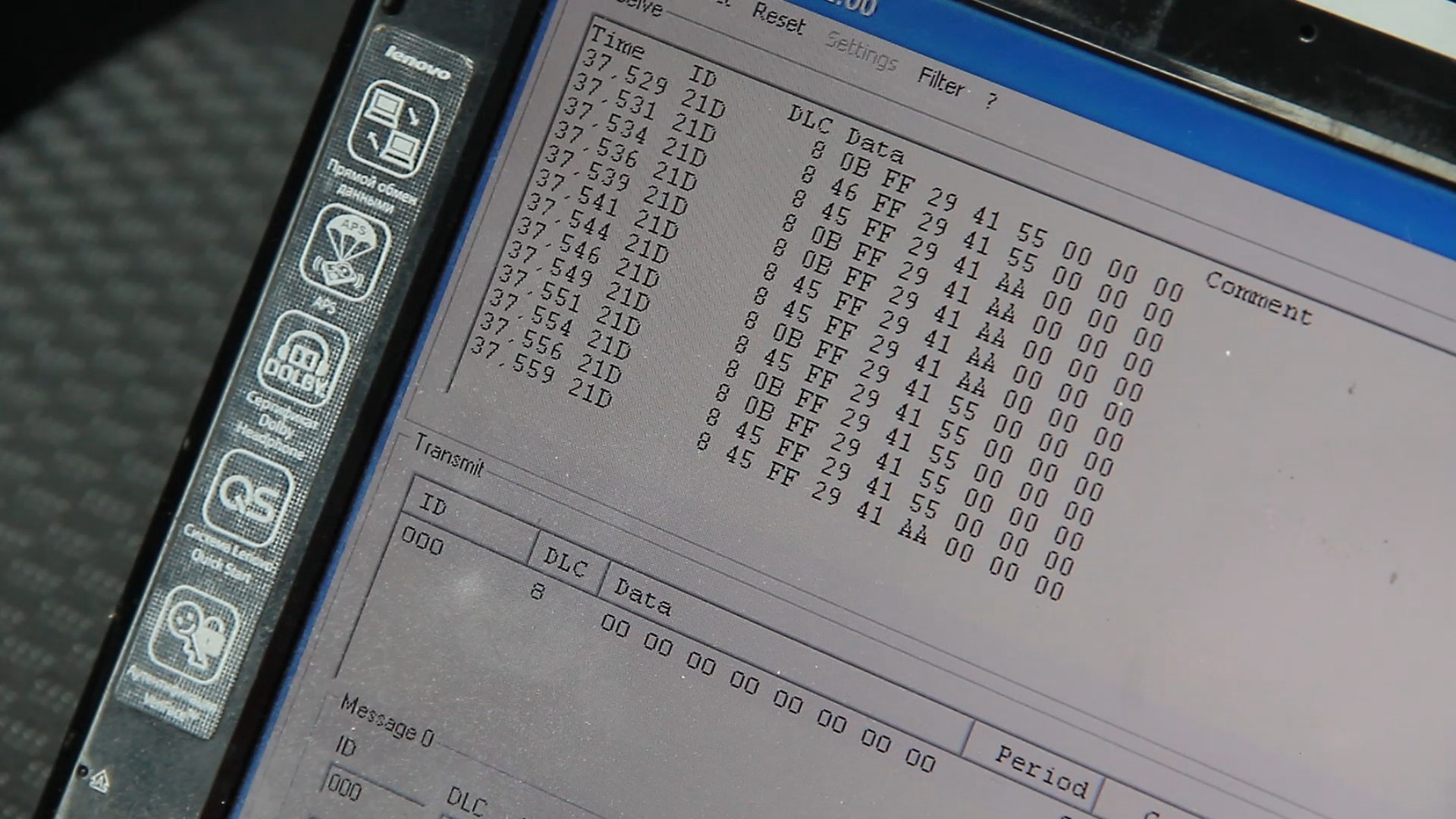 Le manuel sur le protocole de communication lidar avec le monde extérieur décrit de nombreux paramètres transmis. Dans notre cas, il a été possible de réaliser uniquement la mesure de la distance à l'avant de l'objet.
Le manuel sur le protocole de communication lidar avec le monde extérieur décrit de nombreux paramètres transmis. Dans notre cas, il a été possible de réaliser uniquement la mesure de la distance à l'avant de l'objet.Test
Pour les tests, la voiture d'un ami a été choisie comme cible. Le test était le suivant:- On se rapproche le plus possible de la cible, on fixe le premier octet du paquet
- Nous mesurons la distance jusqu'au but avec un ruban à mesurer laser
- Nous comparons les données de la roulette avec les données transmises par le lidar.
Correspondance de la valeur du premier octet du paquet LIDAR et de la valeur mesurée par le ruban à mesurer laser:0x41 = 2,054 m
0x46 = 3,166 m
0x49 = 3,8 m
0x7F - la cible est perdue
Il s'est avéré que le lidar mesure en toute confiance la distance jusqu'à la cible pas plus de 4 mètres. À mon avis, ce n'est pas le meilleur résultat pour un capteur de système de freinage d'urgence. Peut-être que l'appareil fonctionnait dans une sorte de mode simplifié ou de test et sur une voiture, l'appareil mesure la distance dans une plage plus large. Nous avons également mené une expérience avec un grand tableau blanc brillant, dans ce cas la distance a été mesurée jusqu'à 5 mètres.Résumé
Le Mazda Short Range LIDAR fabriqué par Continental est un appareil intéressant. J'aimerais que la plage de mesure de la portée dépasse les allées de 4 mètres. S'il y a une opportunité, je vais essayer de le configurer dans le mode décrit dans la documentation et vous permet de mesurer de grandes distances et vitesses d'objets. Il peut être possible de revitaliser le deuxième canal CAN. S'il y a soudain quelqu'un qui veut creuser un appareil à Novossibirsk, je serai heureux de travailler ensemble.J'ajoute que l'appareil est assez facile à trouver lors de l'analyse au prix de 3 000 à 6 000 roubles.Numéro de catalogue: GHP9-67XD0Et enfin, un film sur un appareil tourné au mieux de ses capacités.Liens:→ Continental, documentation→ MAZDA→ User StorySource: https://habr.com/ru/post/fr399621/
All Articles