Comment nous nous sommes préparés pour UAV Challenge 2016
 Murena quad-avion pendant les vols d'essaiUAV Challenge est un événement annuel visant à étendre les capacités des UAVet, en combinaison, l'une des compétitions de robotique les plus ambitieuses au monde. L'impact de l'événement sur l'industrie est assez important: en 2014, par exemple, les contributeurs réguliers de projets populaires tels que Ardupilot, PX4 et Paparazzi ont participé au défi UAV, de sorte que de nombreuses fonctionnalités de ces contrôleurs de vol existants aujourd'hui ont été formées précisément sous l'influence des exigences de ces compétitions. Tous les deux ans, le concours est ouvert à des équipes du monde entier, et en même temps la mission de sauver une personne devient le thème. Cette année, nous avons également réussi à entrer dans la liste des dix équipes qui ont passé les trois étapes préliminaires du UAV Challenge, et nous sommes allées aux épreuves de la dernière partie, qui s'est déroulée du 27 au 29 septembre à Dalby, en Australie. Le défi a pris fin il y a deux mois - depuis lors, nos impressions se sont calmées,nous avons analysé l'expérience et sommes maintenant prêts à décrire les deux avions avec lesquels nous sommes arrivés à l'événement.Nous sommes MelAvio Avionics Club, une association d'étudiants de l'Université de technologie de Varsovie. Nous nous occupons de la programmation, de l'électronique et de la mécanique dans le cadre de leur application aux drones, et presque tout notre travail est consacré à la préparation de diverses compétitions, dont le principal a récemment été le défi UAV. En fait, cette année, MelAvio a participé au défi pour la deuxième fois: avant cela, il y a deux ans, notre équipe était déjà allée en finale en Australie. Ensuite, nous avons réussi à nous montrer bien avec la conception mécanique d'origine et un contrôleur de vol fait maison, prenant la dixième place au classement général et recevant un prix pour les compétences de vol, bien que ne remplissant pas pleinement la mission de la compétition.
Murena quad-avion pendant les vols d'essaiUAV Challenge est un événement annuel visant à étendre les capacités des UAVet, en combinaison, l'une des compétitions de robotique les plus ambitieuses au monde. L'impact de l'événement sur l'industrie est assez important: en 2014, par exemple, les contributeurs réguliers de projets populaires tels que Ardupilot, PX4 et Paparazzi ont participé au défi UAV, de sorte que de nombreuses fonctionnalités de ces contrôleurs de vol existants aujourd'hui ont été formées précisément sous l'influence des exigences de ces compétitions. Tous les deux ans, le concours est ouvert à des équipes du monde entier, et en même temps la mission de sauver une personne devient le thème. Cette année, nous avons également réussi à entrer dans la liste des dix équipes qui ont passé les trois étapes préliminaires du UAV Challenge, et nous sommes allées aux épreuves de la dernière partie, qui s'est déroulée du 27 au 29 septembre à Dalby, en Australie. Le défi a pris fin il y a deux mois - depuis lors, nos impressions se sont calmées,nous avons analysé l'expérience et sommes maintenant prêts à décrire les deux avions avec lesquels nous sommes arrivés à l'événement.Nous sommes MelAvio Avionics Club, une association d'étudiants de l'Université de technologie de Varsovie. Nous nous occupons de la programmation, de l'électronique et de la mécanique dans le cadre de leur application aux drones, et presque tout notre travail est consacré à la préparation de diverses compétitions, dont le principal a récemment été le défi UAV. En fait, cette année, MelAvio a participé au défi pour la deuxième fois: avant cela, il y a deux ans, notre équipe était déjà allée en finale en Australie. Ensuite, nous avons réussi à nous montrer bien avec la conception mécanique d'origine et un contrôleur de vol fait maison, prenant la dixième place au classement général et recevant un prix pour les compétences de vol, bien que ne remplissant pas pleinement la mission de la compétition. Barracuda, drone MelAvio, au UAV Challenge Outback Rescue 2014Cette année, nous avons un peu changé l'approche de la participation et utilisé un contrôleur de vol prêt à l'emploi (Ardupilot sur Pixhawk), le finalisant pour répondre à nos besoins. Cela est dû au fait que les termes du défi sont devenus plus compliqués par rapport à la dernière fois, et le développement indépendant d'une solution qui remplit toutes les conditions est une tâche trop ambitieuse, il était plus logique d'utiliser des projets open source existants.
Barracuda, drone MelAvio, au UAV Challenge Outback Rescue 2014Cette année, nous avons un peu changé l'approche de la participation et utilisé un contrôleur de vol prêt à l'emploi (Ardupilot sur Pixhawk), le finalisant pour répondre à nos besoins. Cela est dû au fait que les termes du défi sont devenus plus compliqués par rapport à la dernière fois, et le développement indépendant d'une solution qui remplit toutes les conditions est une tâche trop ambitieuse, il était plus logique d'utiliser des projets open source existants.Défi Défi
Pour clarifier la portée de la tâche, il est logique de décrire brièvement la mission présentée pour le concours. La tâche des équipes était de livrer un échantillon de sang à Joe, un habitant de la campagne, qui, selon la légende, se sentait soudainement mal à trouver dans sa maison en dehors de la ville. La maison de Joe est coupée de la ville par les inondations, donc pour l'atteindre et voler en arrière, l'avion doit franchir complètement jusqu'à cinquante et un kilomètres d'espace aérien le long d'une trajectoire indirecte. De plus, la position de Joe n'est connue qu'à une précision de cent mètres, et afin de fermer le terrain et d'éviter de blesser la personne, l'avion doit la localiser plus précisément déjà en place. La situation est également compliquée par le fait qu’il n’y a pratiquement aucune garantie sur le paysage tant au début de la mission qu’aux alentours de Joe,de sorte que le drone doit avoir la capacité de décoller ou d'atterrir verticalement ou verticalement, ainsi qu'un système qui permet avec un degré de fiabilité suffisant de sélectionner un endroit approprié pour l'atterrissage. Les organisateurs du challenge encouragent le plus possible le comportement autonome du drone, donc la meilleure approche possible est d'éliminer complètement les actions du pilote des missions, du départ du site de lancement à l'atterrissage avec une prise de sang au même endroit. En plus du drone principal de «livraison», un avion auxiliaire peut participer à la mission. Les deux appareils ont un large éventail d'exigences afin d'assurer leur vol en toute sécurité et leur comportement correct dans des situations imprévues.ainsi qu'un système qui permet avec un degré de fiabilité suffisant de choisir un endroit approprié pour l'atterrissage. Les organisateurs du challenge encouragent le plus possible le comportement autonome du drone, donc la meilleure approche possible est d'éliminer complètement les actions du pilote des missions, du départ du site de lancement à l'atterrissage avec une prise de sang au même endroit. En plus du drone principal de «livraison», un avion auxiliaire peut participer à la mission. Les deux appareils ont un large éventail d'exigences afin d'assurer leur vol en toute sécurité et leur comportement correct dans des situations imprévues.ainsi qu'un système qui permet avec un degré de fiabilité suffisant de choisir un endroit approprié pour l'atterrissage. Les organisateurs du challenge encouragent le plus possible le comportement autonome du drone, donc la meilleure approche possible est d'éliminer complètement les actions du pilote des missions, du départ du site de lancement à l'atterrissage avec une prise de sang au même endroit. En plus du drone principal de «livraison», un avion auxiliaire peut participer à la mission. Les deux appareils ont un large éventail d'exigences afin d'assurer leur vol en toute sécurité et leur comportement correct dans des situations imprévues.la meilleure approche possible consiste donc à éliminer complètement les actions du pilote des missions, du départ du site de lancement au débarquement avec un échantillon de sang au même endroit. En plus du drone principal de «livraison», un avion auxiliaire peut participer à la mission. Les deux appareils ont un large éventail d'exigences afin d'assurer leur vol en toute sécurité et leur comportement correct dans des situations imprévues.la meilleure approche possible consiste donc à éliminer complètement les actions du pilote des missions, du départ du site de lancement au débarquement avec un échantillon de sang au même endroit. En plus du drone principal de «livraison», un avion auxiliaire peut participer à la mission. Les deux appareils ont un large éventail d'exigences afin d'assurer leur vol en toute sécurité et leur comportement correct dans des situations imprévues.Les deux appareils ont un large éventail d'exigences afin d'assurer leur vol en toute sécurité et leur comportement correct dans des situations imprévues.Les deux appareils ont un large éventail d'exigences afin d'assurer leur vol en toute sécurité et leur comportement correct dans des situations imprévues. ,En tant que drone principal de la mission, nous avons décidé d'utiliser un quad-avion - une combinaison d'un quadricoptère et d'un avion classique. La nécessité de fournir un décollage et un atterrissage verticaux a immédiatement retiré de notre attention les schémas standard à voilure fixe, de sorte que les principales alternatives à l'option choisie étaient un tiltrotor et un hélicoptère. La version avec un convertiplane a été rejetée en raison du fait qu'avec un pas fixe de l'hélice, les moteurs du convertiplane sont voués à une faible efficacité, ce qui était inacceptable pour nous en raison de la plage requise supposée; la construction d'un tiltrotor avec une hélice à pas variable impliquait un degré de complexité mécanique, auquel nous, en tant qu'organisation scientifique étudiante, ne pouvions pas faire face en raison de ressources limitées.Pour l'option hélicoptère, nous nous attendions également à rencontrer des difficultés avec la mécanique, mais elles ne semblaient pas trop déprimantes, et nous avons refusé cette option en grande partie parce que le quad-avion ressemblait à une plate-forme plus originale et intéressante.
,En tant que drone principal de la mission, nous avons décidé d'utiliser un quad-avion - une combinaison d'un quadricoptère et d'un avion classique. La nécessité de fournir un décollage et un atterrissage verticaux a immédiatement retiré de notre attention les schémas standard à voilure fixe, de sorte que les principales alternatives à l'option choisie étaient un tiltrotor et un hélicoptère. La version avec un convertiplane a été rejetée en raison du fait qu'avec un pas fixe de l'hélice, les moteurs du convertiplane sont voués à une faible efficacité, ce qui était inacceptable pour nous en raison de la plage requise supposée; la construction d'un tiltrotor avec une hélice à pas variable impliquait un degré de complexité mécanique, auquel nous, en tant qu'organisation scientifique étudiante, ne pouvions pas faire face en raison de ressources limitées.Pour l'option hélicoptère, nous nous attendions également à rencontrer des difficultés avec la mécanique, mais elles ne semblaient pas trop déprimantes, et nous avons refusé cette option en grande partie parce que le quad-avion ressemblait à une plate-forme plus originale et intéressante.La construction
Avant de concevoir le modèle «sérieux» du quad-plan, nous avons mis au point un modèle de test - un appareil que nous avons appelé le «Freak». Cet hybride a été fabriqué sur la base d'un modèle réduit d'avion prêt à l'emploi et a été conçu pour tester l'opérabilité de l'idée même d'un quad-avion, ainsi que toutes les innovations que nous adaptons au contrôleur de vol. Après nous être assurés que nous pouvions vraiment voler sur une telle configuration de drone, nous avons commencé à développer un modèle plus grand. Avion d'essaiDès le début du développement, il était clair que les hélices et les moteurs hélicoptères créeraient une résistance et un déséquilibre supplémentaires en mode avion, nous avons donc décidé d'essayer de rendre la conception de l'avion elle-même aussi «freinée» que possible et aussi stable que possible. De plus, notre exigence initiale était de préserver un maximum d'espace dans le corps de l'avion, afin qu'il y ait des équipements de système de vision par ordinateur et des batteries lithium-polymère d'une capacité suffisante pour mener à bien une mission entière (l'avion est entièrement électrique). Sur la base de ces considérations, nous avons choisi un avion à aile haute avec une aile trapézoïdale d'allongement moyen et une queue en T; l'angle de l'aile transversale en V a été choisi égal à un degré et demi.Avec les données initiales indiquées sur la conception et l'hypothèse de la masse de l'avion, nous avons commencé le développement. Tout d'abord, avec l'aide de l'application Profili 2.0, une option de profil appropriée pour l'aile principale de l'avion a été sélectionnée, après quoi dans XFLR5 nous avons spécifié la forme de l'aile et le plumage en volume. De plus, chez ANSYS Fluent, nous avons vérifié que les moteurs et hélices copter situés à proximité immédiate de l'aile n'apportent pas de changement critique dans la nature du flux d'air sur l'aile. Pour mener à bien ces procédures, nous avons procédé à une étude plus détaillée de l'ensemble de la structure dans SOLIDWORKS.
Avion d'essaiDès le début du développement, il était clair que les hélices et les moteurs hélicoptères créeraient une résistance et un déséquilibre supplémentaires en mode avion, nous avons donc décidé d'essayer de rendre la conception de l'avion elle-même aussi «freinée» que possible et aussi stable que possible. De plus, notre exigence initiale était de préserver un maximum d'espace dans le corps de l'avion, afin qu'il y ait des équipements de système de vision par ordinateur et des batteries lithium-polymère d'une capacité suffisante pour mener à bien une mission entière (l'avion est entièrement électrique). Sur la base de ces considérations, nous avons choisi un avion à aile haute avec une aile trapézoïdale d'allongement moyen et une queue en T; l'angle de l'aile transversale en V a été choisi égal à un degré et demi.Avec les données initiales indiquées sur la conception et l'hypothèse de la masse de l'avion, nous avons commencé le développement. Tout d'abord, avec l'aide de l'application Profili 2.0, une option de profil appropriée pour l'aile principale de l'avion a été sélectionnée, après quoi dans XFLR5 nous avons spécifié la forme de l'aile et le plumage en volume. De plus, chez ANSYS Fluent, nous avons vérifié que les moteurs et hélices copter situés à proximité immédiate de l'aile n'apportent pas de changement critique dans la nature du flux d'air sur l'aile. Pour mener à bien ces procédures, nous avons procédé à une étude plus détaillée de l'ensemble de la structure dans SOLIDWORKS.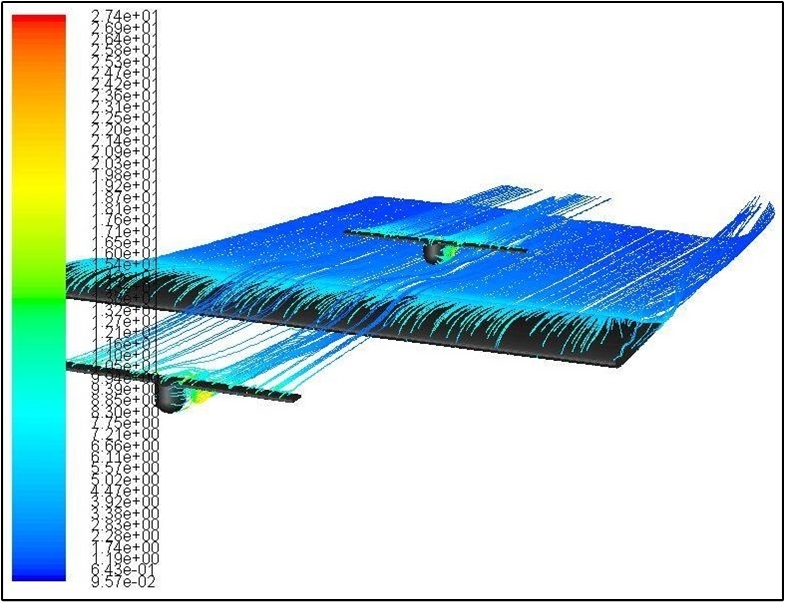 Test de débit d'hélice d'aéronef dans ANSYS FluentLors des travaux sur la structure, une attention particulière a dû être accordée à la carrosserie et à l'aile de l'avion, car elles ont le nombre maximal de pièces et ont le plus grand impact sur la capacité de charge et la dynamique de l'avion. Une approche particulière de ces éléments était nécessaire non seulement lors du développement, mais aussi lors de l'assemblage, car il fallait les rendre aussi légers que possible, tout en conservant leur résistance suffisante.L'aile de l'avion était composée de trois éléments: la section centrale et les consoles droite et gauche. La base de la construction de l'aile était en mousse de polystyrène extrudé. Certaines parties de l'aile ont été conçues pour que leur surface soit droite, et grâce à cela, une machine à fil CNC pourrait être utilisée pour couper avec précision le polyester. Après cela, le polyester préfabriqué a été soumis à un traitement supplémentaire afin d'augmenter sa résistance et d'améliorer ses performances aérodynamiques. Ainsi, le flan de la section centrale a été laminé avec de la fibre de carbone et de la résine de polyester; afin de garder la pièce lisse et uniforme, pendant la période de stratification, elle a été enveloppée de plexiglas, placée dans un sac sous vide et fixée dans un négatif en mousse de polystyrène.Il n'était pas possible d'utiliser de la fibre de carbone pour la fabrication de consoles d'aile, notamment parce qu'il était nécessaire de placer des équipements de transmission radio dans ces parties (le charbon crée des interférences), de sorte que les consoles étaient stratifiées avec une couche de fibre de verre et une couche de balsa. Des fixations ont été réalisées sur les bords des éléments pour leur assemblage en une seule structure d'aile. En outre, un emplacement a été découpé dans l'aile pour placer un émetteur-récepteur radio, des commandes pour les ailerons, des câbles et d'autres équipements; aux endroits nécessaires, des découpes imprimées sur une imprimante 3D ont été fixées aux découpes pour l'équipement.Des fixations ont été réalisées sur les bords des éléments pour leur assemblage en une seule structure d'aile. En outre, un emplacement a été découpé dans l'aile pour placer un émetteur-récepteur radio, des commandes pour les ailerons, des câbles et d'autres équipements; aux endroits nécessaires, des découpes imprimées sur une imprimante 3D ont été fixées aux découpes pour l'équipement.Des fixations ont été réalisées sur les bords des éléments pour leur assemblage en une seule structure d'aile. En outre, un emplacement a été découpé dans l'aile pour placer un émetteur-récepteur radio, des commandes pour les ailerons, des câbles et d'autres équipements; aux endroits nécessaires, des découpes imprimées sur une imprimante 3D ont été fixées aux découpes pour l'équipement.Aux endroits où les consoles d'ailes sont reliées à l'aile centrale, des fixations pour poutres longitudinales ont également été prévues, aux extrémités desquelles se trouvent des moteurs en hélicoptère. Les fixations des consoles d'ailes, des poutres en hélice et du plumage ont été imprimées avec du nylon en utilisant la technologie SLS avec une précision accrue. Les supports des moteurs à hélice ont été découpés au laser à partir de contreplaqué et collés avec de la résine de polyester.
Test de débit d'hélice d'aéronef dans ANSYS FluentLors des travaux sur la structure, une attention particulière a dû être accordée à la carrosserie et à l'aile de l'avion, car elles ont le nombre maximal de pièces et ont le plus grand impact sur la capacité de charge et la dynamique de l'avion. Une approche particulière de ces éléments était nécessaire non seulement lors du développement, mais aussi lors de l'assemblage, car il fallait les rendre aussi légers que possible, tout en conservant leur résistance suffisante.L'aile de l'avion était composée de trois éléments: la section centrale et les consoles droite et gauche. La base de la construction de l'aile était en mousse de polystyrène extrudé. Certaines parties de l'aile ont été conçues pour que leur surface soit droite, et grâce à cela, une machine à fil CNC pourrait être utilisée pour couper avec précision le polyester. Après cela, le polyester préfabriqué a été soumis à un traitement supplémentaire afin d'augmenter sa résistance et d'améliorer ses performances aérodynamiques. Ainsi, le flan de la section centrale a été laminé avec de la fibre de carbone et de la résine de polyester; afin de garder la pièce lisse et uniforme, pendant la période de stratification, elle a été enveloppée de plexiglas, placée dans un sac sous vide et fixée dans un négatif en mousse de polystyrène.Il n'était pas possible d'utiliser de la fibre de carbone pour la fabrication de consoles d'aile, notamment parce qu'il était nécessaire de placer des équipements de transmission radio dans ces parties (le charbon crée des interférences), de sorte que les consoles étaient stratifiées avec une couche de fibre de verre et une couche de balsa. Des fixations ont été réalisées sur les bords des éléments pour leur assemblage en une seule structure d'aile. En outre, un emplacement a été découpé dans l'aile pour placer un émetteur-récepteur radio, des commandes pour les ailerons, des câbles et d'autres équipements; aux endroits nécessaires, des découpes imprimées sur une imprimante 3D ont été fixées aux découpes pour l'équipement.Des fixations ont été réalisées sur les bords des éléments pour leur assemblage en une seule structure d'aile. En outre, un emplacement a été découpé dans l'aile pour placer un émetteur-récepteur radio, des commandes pour les ailerons, des câbles et d'autres équipements; aux endroits nécessaires, des découpes imprimées sur une imprimante 3D ont été fixées aux découpes pour l'équipement.Des fixations ont été réalisées sur les bords des éléments pour leur assemblage en une seule structure d'aile. En outre, un emplacement a été découpé dans l'aile pour placer un émetteur-récepteur radio, des commandes pour les ailerons, des câbles et d'autres équipements; aux endroits nécessaires, des découpes imprimées sur une imprimante 3D ont été fixées aux découpes pour l'équipement.Aux endroits où les consoles d'ailes sont reliées à l'aile centrale, des fixations pour poutres longitudinales ont également été prévues, aux extrémités desquelles se trouvent des moteurs en hélicoptère. Les fixations des consoles d'ailes, des poutres en hélice et du plumage ont été imprimées avec du nylon en utilisant la technologie SLS avec une précision accrue. Les supports des moteurs à hélice ont été découpés au laser à partir de contreplaqué et collés avec de la résine de polyester. Section centrale dans le processus de fabricationLe cadre de l'affaire était également en contreplaqué. Les pièces nécessaires ont été découpées en contreplaqué avec un laser, puis collées en une seule structure à l'aide de colle cyanoacrylate. Le cadre a été collé avec du balsa, renforcé sur le nez et plié avec de la fibre de carbone, puis laminé avec de la fibre de verre. La conception a fourni de l'espace pour une caméra avec un stabilisateur (avant de la coque), des batteries (arrière de la coque), ainsi qu'un ordinateur de bord et un contrôleur de vol (milieu de la coque). De plus, des connexions ont été développées pour l'aile et la poutre de queue, ce qui a permis de positionner facilement les câbles d'alimentation et de signal à l'intérieur de la structure de l'avion.Le stabilisateur et l'élévateur ont été fabriqués selon la méthode similaire à la fabrication d'une aile d'avion.
Section centrale dans le processus de fabricationLe cadre de l'affaire était également en contreplaqué. Les pièces nécessaires ont été découpées en contreplaqué avec un laser, puis collées en une seule structure à l'aide de colle cyanoacrylate. Le cadre a été collé avec du balsa, renforcé sur le nez et plié avec de la fibre de carbone, puis laminé avec de la fibre de verre. La conception a fourni de l'espace pour une caméra avec un stabilisateur (avant de la coque), des batteries (arrière de la coque), ainsi qu'un ordinateur de bord et un contrôleur de vol (milieu de la coque). De plus, des connexions ont été développées pour l'aile et la poutre de queue, ce qui a permis de positionner facilement les câbles d'alimentation et de signal à l'intérieur de la structure de l'avion.Le stabilisateur et l'élévateur ont été fabriqués selon la méthode similaire à la fabrication d'une aile d'avion.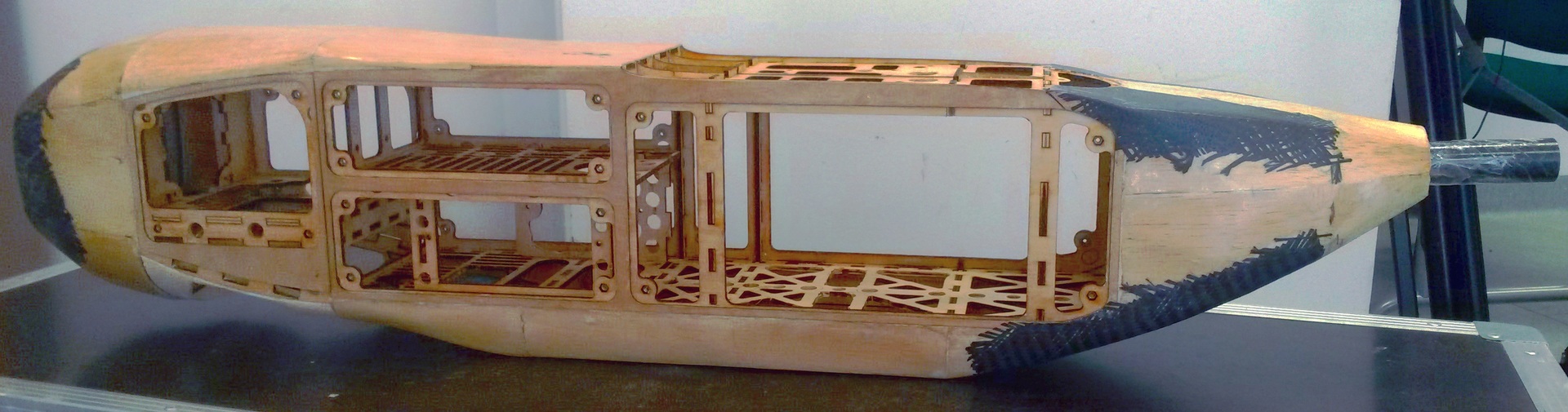 Cadre de drone
Cadre de dronePartie puissance
En tant que moteurs à hélice pour l'appareil, nous avons pris les plus grands pour nous dans la zone d'accès opérationnel - le T-MOTOR U8 Pro 170KV avec les hélices en bois de 20 pouces de diamètre recommandées par T-MOTOR pour ces moteurs. ESC'i T-MOTOR FLAME 80A ont été sélectionnés pour contrôler la vitesse des moteurs. Alimentée par deux batteries au lithium-polymère à six cellules Tattu 22000mAh connectées en série, une telle centrale électrique nous a permis d'obtenir une traction verticale maximale de 20 kilogrammes.Pour la propulsion, nous avons choisi le moteur Scorpion HKIII 4035 500KV avec l'ESC FOXY XR-120 OPTO alimenté par la même batterie à laquelle les moteurs hélicoptères sont connectés.La masse finale au décollage de l'avion avec tout l'équipement à bord est ressortie à 14 kilogrammes. La vitesse maximale de l'avion est de 40 m / s, la vitesse de croisière est de 25 m / s, la vitesse de décrochage est de 18 m / s, la durée de vol en mode avion est supérieure à une heure, la portée de vol peut atteindre 100 km, ce qui aurait dû nous permettre d'effectuer missions même dans des conditions météorologiques défavorables.Système de vision par ordinateur
Une partie importante de l'avion principal pour nous était le système de vision par ordinateur embarqué, sans lequel il est impossible de trouver Joe et de terminer la mission. Les principaux éléments du système étaient la caméra RVB JAI GO 2400 avec transfert plein format et résolution Full HD, et le puissant mini-ordinateur GIGABYTE BXi7-5775. La caméra était montée sur une suspension stabilisatrice de notre conception mécanique d'origine sous le contrôle du contrôleur Alexmos - cela nous a permis d'obtenir des images avec un niveau d'inclinaison constant par rapport au sol, de sorte que la silhouette d'une personne sur eux était clairement reconnaissable. L'ordinateur était connecté au contrôleur de vol pour fournir des données et des commandes de télémétrie. De plus, à l'aide d'un modem 4G, l'ordinateur a eu accès au serveur FTP,à travers lequel la communication a été établie avec le poste de l'opérateur du système de vision par ordinateur. L'algorithme du programme que nous avons lancé à bord est brièvement décrit dans le paragraphe suivant.Après avoir reçu l'image de la caméra, le dernier paquet de données de télémétrie reçu du contrôleur de vol lui est immédiatement attaché, de sorte que pour chaque pixel de l'image, vous pouvez approximativement calculer ses coordonnées géographiques. Après cela, des zones d'intérêt sont recherchées: pour cela, un histogramme d'image est construit, et des niveaux y sont sélectionnés, dont le nombre de pixels est supérieur à une certaine valeur de seuil - ce sont les niveaux de régions "inintéressantes", et les pixels correspondants ne sont plus pris en compte. Les pixels «intéressants» restants subissent une opération d'érosion morphologique, de sorte qu'il ne reste que des pixels combinés en groupes - ces groupes sont triés par concentration, taille et couleur, et en conséquence, nous obtenons un groupe classé de zones dans l'image qui peuvent au moins ressembler par personne.Après cela, pour chacun de ces domaines, nous calculonsLe descripteur HOG et en utilisant le vecteur des vecteurs de support, nous le classons comme personne ou non-personne. Si une région est classée comme une personne, cela ne signifie pas que nous la considérons immédiatement comme telle - elle reçoit simplement un avantage significatif dans le classement. Ensuite, les images de tous les domaines d'intérêt trouvés sont envoyées au serveur FTP dans l'ordre correspondant à leur évaluation. Le fichier de chacune de ces images comprend des informations sur la géolocalisation de la région et l'identifiant de l'image complète à partir de laquelle la région est prise.L'application au poste de l'opérateur vous permet de visualiser des images des zones d'intérêt téléchargées par la machine sur un serveur FTP avec une carte de la zone sur laquelle l'appareil survole, et de les trier par note et par heure. Si une certaine zone d'intérêt fait suspecter l'opérateur, alors, à nouveau via un serveur FTP, il peut envoyer une demande à l'avion, afin qu'il télécharge sur le serveur une photo complète correspondant à la zone d'intérêt sélectionnée. De plus, si dans l'un des domaines d'intérêt indiqués, l'exploitant reconnaît la personne qu'il recherche, il peut envoyer ses coordonnées d'atterrissage préférées à l'ordinateur de bord, et l'ordinateur les transmettra au contrôleur de vol.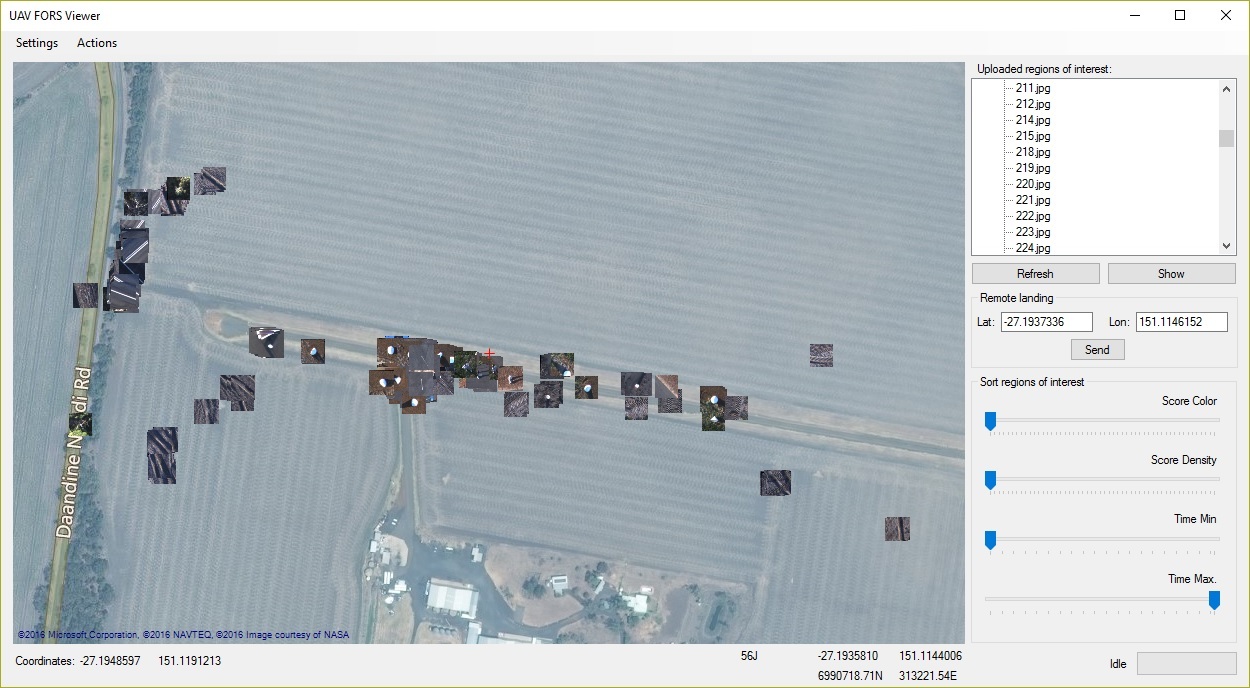 Application au poste opérateurLa machine de vecteurs supports pour le classement d'une personne a été formée par nos soins sur les exemples de photographies prises lors des vols d'essai. Avant de calculer le descripteur HOG de chacune des zones d'intérêt, nous effectuons quelques transformations géométriques sur la zone afin d'amener la personne potentielle dans l'image en position verticale, car le HOG traditionnel fonctionne bien pour classer la personne uniquement en position debout.Classification des régions d'intérêt à bord du drone: contour rouge - la région est classée comme non-personne; le contour vert - la région est classée comme une personneÉtant donné que la tâche consistait non seulement à trouver une personne, mais également à choisir un endroit approprié pour atterrir, en plus des opérations ci-dessus, le système de vision par ordinateur de l'avion principal a été programmé pour classer le territoire sur lequel l'avion volait. Parmi les classes possibles ont été identifiées: terres, asphalte, herbe, buissons et arbres, obstacles non spécifiés; la classification est basée sur des informations sur la couleur et l'hétérogénéité de l'image à un endroit donné. Lorsque l'opérateur du poste de travail doit prendre une décision concernant le site d'atterrissage, il peut demander à l'avion des informations sur la classification de la section de carte d'intérêt.
Application au poste opérateurLa machine de vecteurs supports pour le classement d'une personne a été formée par nos soins sur les exemples de photographies prises lors des vols d'essai. Avant de calculer le descripteur HOG de chacune des zones d'intérêt, nous effectuons quelques transformations géométriques sur la zone afin d'amener la personne potentielle dans l'image en position verticale, car le HOG traditionnel fonctionne bien pour classer la personne uniquement en position debout.Classification des régions d'intérêt à bord du drone: contour rouge - la région est classée comme non-personne; le contour vert - la région est classée comme une personneÉtant donné que la tâche consistait non seulement à trouver une personne, mais également à choisir un endroit approprié pour atterrir, en plus des opérations ci-dessus, le système de vision par ordinateur de l'avion principal a été programmé pour classer le territoire sur lequel l'avion volait. Parmi les classes possibles ont été identifiées: terres, asphalte, herbe, buissons et arbres, obstacles non spécifiés; la classification est basée sur des informations sur la couleur et l'hétérogénéité de l'image à un endroit donné. Lorsque l'opérateur du poste de travail doit prendre une décision concernant le site d'atterrissage, il peut demander à l'avion des informations sur la classification de la section de carte d'intérêt.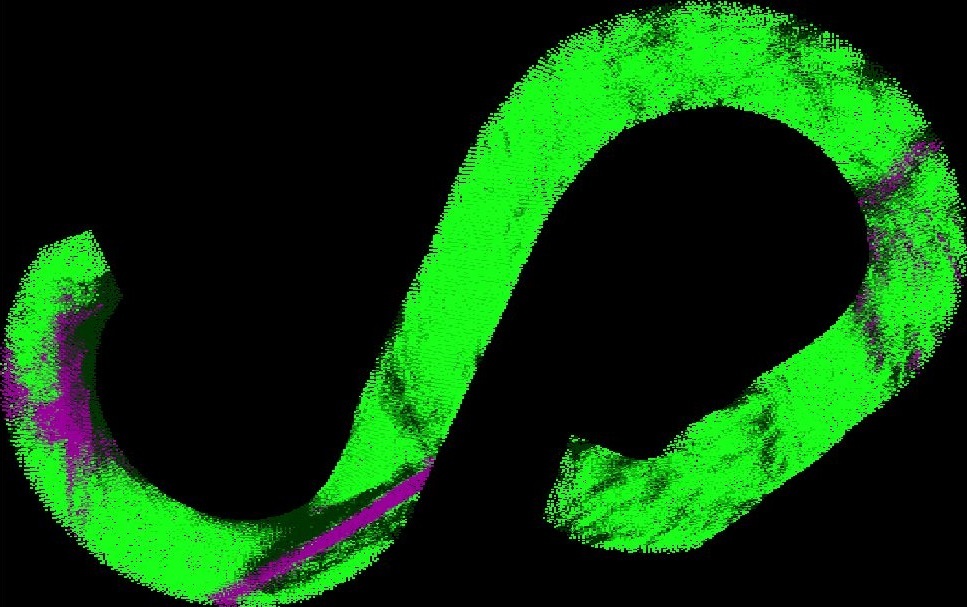 : - — , - — , —En plus du drone principal décrit, nous avons décidé d’en utiliser un auxiliaire, qui serait chargé de relayer dans le canal de communication entre la station au sol de l’opérateur et l’avion principal. En effet, si notre drone principal est à plusieurs kilomètres de la station au sol, le maintien d'une communication radio directe pour recevoir des données de télémétrie et transmettre des commandes devient problématique, à la fois en raison d'une diminution de la puissance du signal avec l'augmentation de la distance et en raison de l'apparition d'obstacles sur la ligne de vue entre antennes au sol et à bord de l'appareil. Il n'est pas toujours possible de faire face à la difficulté d'établir une communication radio directe en augmentant la puissance du signal, car, d'une part, il existe des restrictions d'État qui déterminent la puissance maximale autorisée du signal radio, et d'autre part,une augmentation de puissance peut ne pas apporter de résultat positif, surtout lorsque l'avion se trouve à basse altitude à grande distance. Nous résolvons ce problème en ajoutant un répéteur, qui est situé à haute altitude, dans la ligne de visée à la fois du poste de l'opérateur et de l'avion "en service".Pour transférer l'équipement de relais, nous avons utilisé une aile volante, réalisée sur la base de la plateforme plutôt populaire Skywalker X8. Dans ce cas, l'aile volante s'inscrit dans les restrictions causées par le paysage inconnu de la rampe de lancement, car elle peut être lancée à partir d'une catapulte légère ou d'un élastique, et peut atterrir automatiquement, sans nécessiter d'espace ouvert significatif pour cela. Afin que l'avion puisse atterrir sans train d'atterrissage, sans subir de dommages importants, nous avons laminé la partie inférieure de la coque avec du Kevlar et de la fibre de verre. De plus, afin d'augmenter la résistance structurelle et d'offrir la possibilité de voler à des vitesses plus élevées, le bord d'attaque de l'aile a également été laminé avec de la fibre de verre. Le X8 était équipé d'un moteur 710 KV conçu pour les batteries lithium-polymère à cinq cellules,et une batterie pour ce moteur pour 16 ampères heures de six cellules. En raison du fait que nous avons utilisé une batterie avec une tension supérieure à la tension nominale du moteur, nous avons dû fournir une entrée d'air supplémentaire pour le refroidissement dans la conception. Pour le moteur, un régulateur de vitesse de 70 A et une hélice repliable de 9,5x8 ont été utilisés. Chez elevons, nous avons livré le servo HS-5625MG de haute qualité de Hitec; les serveurs ont une marge de performance importante, ce qui devrait minimiser la possibilité de perdre des surfaces de contrôle, chacune étant critique dans le cas d'une aile volante. De plus, à bord se trouvaient de petites batteries supplémentaires pour l'avionique et un système de terminaison de vol d'urgence, ainsi qu'un contrôleur de vol (Pixhawk). En conséquence, les caractéristiques de l'appareil étaient les suivantes: poids - 3,5 kilogrammes,vitesse maximale - 35 m / s, vitesse de croisière - 25 m / s, temps de vol - jusqu'à 55 minutes, distance parcourue - plus de 80 km.
: - — , - — , —En plus du drone principal décrit, nous avons décidé d’en utiliser un auxiliaire, qui serait chargé de relayer dans le canal de communication entre la station au sol de l’opérateur et l’avion principal. En effet, si notre drone principal est à plusieurs kilomètres de la station au sol, le maintien d'une communication radio directe pour recevoir des données de télémétrie et transmettre des commandes devient problématique, à la fois en raison d'une diminution de la puissance du signal avec l'augmentation de la distance et en raison de l'apparition d'obstacles sur la ligne de vue entre antennes au sol et à bord de l'appareil. Il n'est pas toujours possible de faire face à la difficulté d'établir une communication radio directe en augmentant la puissance du signal, car, d'une part, il existe des restrictions d'État qui déterminent la puissance maximale autorisée du signal radio, et d'autre part,une augmentation de puissance peut ne pas apporter de résultat positif, surtout lorsque l'avion se trouve à basse altitude à grande distance. Nous résolvons ce problème en ajoutant un répéteur, qui est situé à haute altitude, dans la ligne de visée à la fois du poste de l'opérateur et de l'avion "en service".Pour transférer l'équipement de relais, nous avons utilisé une aile volante, réalisée sur la base de la plateforme plutôt populaire Skywalker X8. Dans ce cas, l'aile volante s'inscrit dans les restrictions causées par le paysage inconnu de la rampe de lancement, car elle peut être lancée à partir d'une catapulte légère ou d'un élastique, et peut atterrir automatiquement, sans nécessiter d'espace ouvert significatif pour cela. Afin que l'avion puisse atterrir sans train d'atterrissage, sans subir de dommages importants, nous avons laminé la partie inférieure de la coque avec du Kevlar et de la fibre de verre. De plus, afin d'augmenter la résistance structurelle et d'offrir la possibilité de voler à des vitesses plus élevées, le bord d'attaque de l'aile a également été laminé avec de la fibre de verre. Le X8 était équipé d'un moteur 710 KV conçu pour les batteries lithium-polymère à cinq cellules,et une batterie pour ce moteur pour 16 ampères heures de six cellules. En raison du fait que nous avons utilisé une batterie avec une tension supérieure à la tension nominale du moteur, nous avons dû fournir une entrée d'air supplémentaire pour le refroidissement dans la conception. Pour le moteur, un régulateur de vitesse de 70 A et une hélice repliable de 9,5x8 ont été utilisés. Chez elevons, nous avons livré le servo HS-5625MG de haute qualité de Hitec; les serveurs ont une marge de performance importante, ce qui devrait minimiser la possibilité de perdre des surfaces de contrôle, chacune étant critique dans le cas d'une aile volante. De plus, à bord se trouvaient de petites batteries supplémentaires pour l'avionique et un système de terminaison de vol d'urgence, ainsi qu'un contrôleur de vol (Pixhawk). En conséquence, les caractéristiques de l'appareil étaient les suivantes: poids - 3,5 kilogrammes,vitesse maximale - 35 m / s, vitesse de croisière - 25 m / s, temps de vol - jusqu'à 55 minutes, distance parcourue - plus de 80 km. Il convient de noter que l'ajout d'un avion supplémentaire au système pour augmenter la zone de couverture des communications entraîne un problème d'organisation de la communication elle-même, car dans ce cas, en plus d'analyser la télémétrie du drone principal et de lui envoyer des commandes, la station de base doit prendre en charge la communication à grande échelle avec l'avion auxiliaire. appareil. Bien entendu, cette communication peut être organisée en ajoutant deux modems radio supplémentaires (l'un pour le drone auxiliaire, l'autre pour la station au sol) fonctionnant dans un canal qui n'interfère pas avec les équipements déjà présents dans le système. Cette option, cependant, n'est pas optimale en raison des coûts supplémentaires et du manque d'évolutivité lors de l'ajout de nouveaux drones au système.La meilleure option est d'utiliser un émetteur-récepteur radio existant pour communiquer avec l'avion auxiliaire. Dans ce cas, le schéma de communication dans le système ressemble à celui illustré dans le diagramme ci-dessous.
Il convient de noter que l'ajout d'un avion supplémentaire au système pour augmenter la zone de couverture des communications entraîne un problème d'organisation de la communication elle-même, car dans ce cas, en plus d'analyser la télémétrie du drone principal et de lui envoyer des commandes, la station de base doit prendre en charge la communication à grande échelle avec l'avion auxiliaire. appareil. Bien entendu, cette communication peut être organisée en ajoutant deux modems radio supplémentaires (l'un pour le drone auxiliaire, l'autre pour la station au sol) fonctionnant dans un canal qui n'interfère pas avec les équipements déjà présents dans le système. Cette option, cependant, n'est pas optimale en raison des coûts supplémentaires et du manque d'évolutivité lors de l'ajout de nouveaux drones au système.La meilleure option est d'utiliser un émetteur-récepteur radio existant pour communiquer avec l'avion auxiliaire. Dans ce cas, le schéma de communication dans le système ressemble à celui illustré dans le diagramme ci-dessous.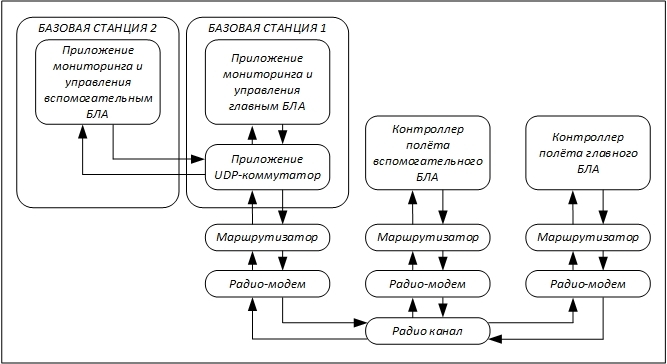
Conclusion
Selon les exigences du concours, pour le passage à la partie finale, chacun des appareils décrits a volé plus de cinq heures; Au cours de ces vols d'essai, nous avons identifié et corrigé de nombreux petits et importants problèmes et erreurs. Notre reportage vidéo pour cette étape ressemblait à ceci:L'une des erreurs les plus désagréables dans la conception mécanique que nous avons remarquées lors des vols préparatoires était une asymétrie importante de la charge sur les moteurs hélicoptères lors de la conversion du mode avion en hélicoptère. Le fait est qu'un angle d'attaque positif de l'aile de l'avion à basse vitesse dévie les faisceaux avec des moteurs en hélice en arrière, de sorte que deux moteurs plus proches de la queue de l'avion reçoivent une charge importante lors de la conversion. De plus, le moment réactif de l'hélice de l'avion crée une charge supplémentaire sur les moteurs du côté gauche, de sorte que le moteur arrière gauche est le plus intense. Dans notre cas, de telles irrégularités à plusieurs reprises ont entraîné des dysfonctionnements de la centrale et un comportement instable de l'avion, qui s'est une fois terminé par une chute avec de graves dommages à la coque. Au momentlorsque nous avons identifié la raison d'un tel comportement incorrect de l'appareil (trois mois avant la compétition), il était trop tard pour apporter des modifications à la mécanique ou essayer d'ajuster le programme de conversion, nous avons donc pris le risque de continuer à participer au défi, sachant que notre conception n'a pas de redondance en cas d'accident . Néanmoins, nous avons essayé de toutes les manières possibles de minimiser la possibilité d'un dysfonctionnement, en contrôlant autant que possible la fonctionnalité de tous les éléments, connexions et accessoires avant chaque vol.nous avons essayé de toutes les manières possibles de minimiser la possibilité d'un dysfonctionnement, tout en contrôlant au maximum la fonctionnalité de tous les éléments, connexions et accessoires avant chaque vol.nous avons essayé de toutes les manières possibles de minimiser la possibilité d'un dysfonctionnement, tout en contrôlant au maximum la fonctionnalité de tous les éléments, connexions et accessoires avant chaque vol.Malheureusement, les précautions que nous avons prises n'étaient pas suffisantes et notre quad-avion s'est écrasé lors de l'un des vols d'essai que nous avons effectués en Australie afin de vérifier l'intégrité structurelle après avoir assemblé l'appareil sur le site de la compétition. En cas d'accident, l'ensemble de la structure a subi des dommages importants, il n'a donc pas été possible de réparer l'appareil et d'essayer de terminer au moins une partie de la mission. Les organisateurs, cependant, étaient sympathiques à notre situation et nous ont donné la permission de voler avec un appareil auxiliaire afin de vérifier la portée de nos communications radio et la capacité de contrôler l'appareil au-delà de la ligne de visée.Au final, il convient de noter qu'aucune des équipes de cette année n'a été en mesure de remplir pleinement la mission de la compétition, qui était associée à la perte d'avions pour diverses raisons: crash, incendie, vol en dehors de l'espace de vol alloué et, en règle générale, planant sur un arbre. L'équipe de TU Delft (la conception mécanique d'origine et un modèle de test du système de vision par ordinateur de Parrot, la vidéo sur le drone ici ) et Canberra UAV (livré un échantillon de sang, mais écrasé l'hélicoptère auxiliaire, la vidéo sur le drone ici ) ont été les plus notées pendant le défi .Pour nous, comme pour d'autres équipes, le défi a constitué une excellente plate-forme pour tenter notre chance et communiquer avec des professionnels des drones du monde entier. Nous avons acquis une grande expérience et collecté beaucoup de matériel qui nous aidera davantage dans nos projets personnels et dans la préparation des prochains concours.Matériaux
" Règlement UAV Challenge Medical Express 2016." Un article des organisateurs du challenge sur les statistiques et l'historique de la compétition.» Description du succès du drone Canberra par Andrew Trijell, le leader idéologique de l'équipe.Source: https://habr.com/ru/post/fr399699/
All Articles