Les scientifiques ont développé une puce pour la planification des mouvements de robots en temps réel
 Si vous avez déjà vu comment les versions de démonstration des robots fonctionnent, vous avez probablement remarqué que le robot peut «geler» pendant longtemps avant de continuer à bouger. Vous pourriez penser que de cette manière, le robot réfléchit à quel point et sur quel chemin se déplacer. Cette hypothèse n'est pas loin de la vérité: à ce moment, le processeur traite les opérations de planification de mouvement, ce qui prend souvent beaucoup de temps.Des chercheurs de l'Université Duke ont trouvé un moyen d'accélérer la planification des mouvements des robots à trois reprises en utilisant un vingtième de la puissance requise aujourd'hui. Leur solution est basée sur un processeur spécialisé qui peut effectuer la partie la plus longue du travail - vérifier toutes les collisions possibles dans toute la gamme des mouvements du robot - avec une grande efficacité.La planification de mouvement, par exemple, pour un bras robotisé implique principalement la création d'une carte d'itinéraire probabiliste. Il s'agit d'un graphique composé de points dans un espace sans obstacle avec des lignes de côtes reliant ces points afin que chaque mouvement entre eux n'entraîne pas de collision. En fait, le planificateur de mouvement sélectionne les points de début et de fin sur le graphique, puis détermine la manière la plus efficace de se déplacer pour passer d'un point à un autre.
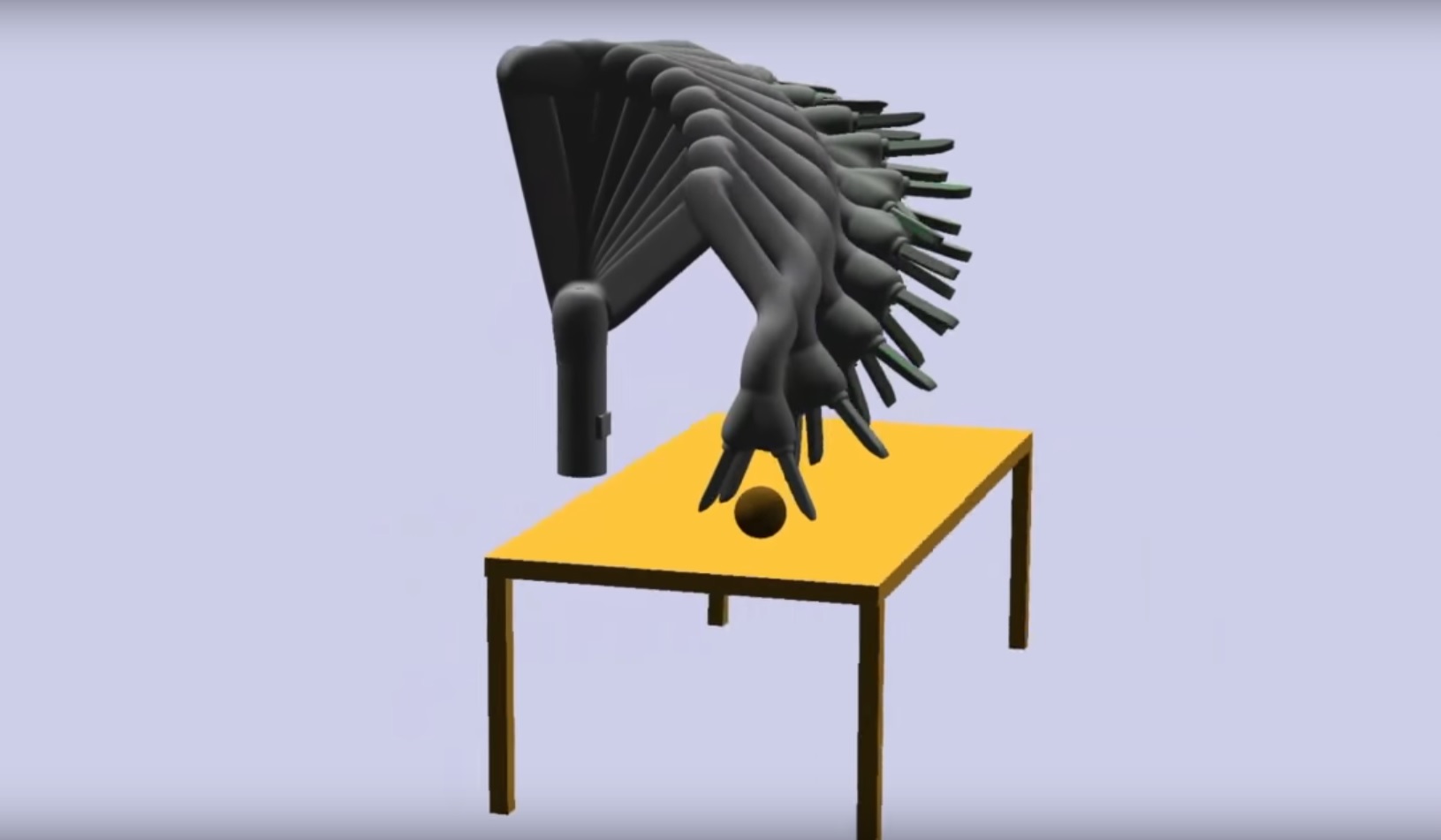
Si vous avez déjà vu comment les versions de démonstration des robots fonctionnent, vous avez probablement remarqué que le robot peut «geler» pendant longtemps avant de continuer à bouger. Vous pourriez penser que de cette manière, le robot réfléchit à quel point et sur quel chemin se déplacer. Cette hypothèse n'est pas loin de la vérité: à ce moment, le processeur traite les opérations de planification de mouvement, ce qui prend souvent beaucoup de temps.Des chercheurs de l'Université Duke ont trouvé un moyen d'accélérer la planification des mouvements des robots à trois reprises en utilisant un vingtième de la puissance requise aujourd'hui. Leur solution est basée sur un processeur spécialisé qui peut effectuer la partie la plus longue du travail - vérifier toutes les collisions possibles dans toute la gamme des mouvements du robot - avec une grande efficacité.La planification de mouvement, par exemple, pour un bras robotisé implique principalement la création d'une carte d'itinéraire probabiliste. Il s'agit d'un graphique composé de points dans un espace sans obstacle avec des lignes de côtes reliant ces points afin que chaque mouvement entre eux n'entraîne pas de collision. En fait, le planificateur de mouvement sélectionne les points de début et de fin sur le graphique, puis détermine la manière la plus efficace de se déplacer pour passer d'un point à un autre. Les algorithmes de planification de mouvement recherchent le chemin optimal d'un point à un autre, ce qui vous permet d'éviter les obstacles (à gauche). Une carte d'itinéraire probabiliste avec des bords reliant les points dans l'espace libre (à droite).En théorie, cela semble assez simple, mais dans la pratique, vous devez prendre en compte le fait que vous travaillez avec un bras robotique. Et lorsque la brosse se déplace d'un point à un autre, l'avant-bras peut entrer en collision avec un obstacle. La zone dans laquelle se déplace le bras du robot est appelée «volume de travail».
Les algorithmes de planification de mouvement recherchent le chemin optimal d'un point à un autre, ce qui vous permet d'éviter les obstacles (à gauche). Une carte d'itinéraire probabiliste avec des bords reliant les points dans l'espace libre (à droite).En théorie, cela semble assez simple, mais dans la pratique, vous devez prendre en compte le fait que vous travaillez avec un bras robotique. Et lorsque la brosse se déplace d'un point à un autre, l'avant-bras peut entrer en collision avec un obstacle. La zone dans laquelle se déplace le bras du robot est appelée «volume de travail».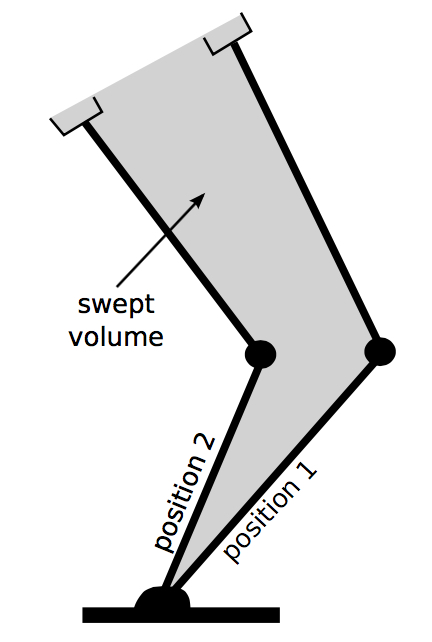 Le volume de travail est l'espace dans lequel le robot change de position d'une position à une autre.Les résultats de l'étude ont montré que la détection d'obstacles prend plus de 99% du temps de calcul. Les calculs préliminaires sont effectués lors de la configuration du robot. Vous créez une carte, qui se compose d'environ 150 000 arêtes, décrivant les trajectoires possibles du robot, tout en évitant les auto-collisions et les collisions avec des choses qui ne changent pas de position, par exemple le sexe.150 000 côtes, c'est trop pour le prototype du système d'équipe de Duke University. Un nombre plus raisonnable étant proche de 1000, les chercheurs ont donc dû trouver un moyen de réduire leur nombre.Pour accélérer et simplifier l'ensemble du processus, les chercheurs ont d'abord modélisé environ 10 000 scénarios avec différents nombres d'obstacles situés au hasard de différentes tailles, puis vérifié les bords de la carte utilisés par le système pour planifier le mouvement. Les côtes rarement utilisées ont été retirées de la carte. Après plusieurs itérations de réduction et de contrôle des résultats dans un exemple, le nombre d'arêtes s'est avéré inférieur à mille. Dans le même temps, la réduction n'a pas affecté la capacité de résoudre deux problèmes principaux du planificateur de mouvement - une vitesse de traitement lente et une consommation d'énergie élevée.Il est très important de limiter le nombre d'arêtes sur la carte à une valeur acceptable, car les capacités du processeur qui traite les opérations de planification sont limitées. Dans ce cas, le processeur - circuit intégré logique programmable ( FPGA ) - est programmé avec un réseau de circuits de détection de collision, chacun correspondant à un front sur la carte. Ainsi, la taille de la carte est limitée par le nombre de tels circuits qui peuvent tenir sur le FPGA - un maximum de plusieurs milliers.La technologie des scientifiques de l'Université Duke fonctionne en décomposant l'espace de travail en milliers de voxels. L'algorithme détermine ensuite si une trajectoire d'objet préprogrammée est intégrée dans l'un des voxels. Grâce aux FPGA, la technologie vérifie des milliers de routes en même temps, puis coud le chemin le plus court en utilisant les options de sécurité restantes. Le robot ne peut que l'exécuter.À la sortie, les scientifiques ont reçu une accélération importante: quel que soit le nombre de bords sur la carte, la vitesse de traitement du FPGA de la carte entière était de 50 nanosecondes par pixel. Dans un exemple particulièrement complexe, le traitement a pris un peu plus de 0,6 ms. L'ordonnanceur, qui fonctionnait sur la base d'un processeur quadricœur Intel Xeon avec une fréquence d'horloge de 3,5 gigahertz, a fait face à cette tâche en 2,738 ms. Les processeurs conventionnels consomment environ 200 à 300 watts d'électricité lors de la planification du mouvement, et le développement des scientifiques de l'Université Duke est inférieur à 10 watts.Désormais, les robots industriels n'utilisent pas de planificateurs de mouvement. En ce qui concerne, par exemple, l'assemblage en ligne de voitures à l'aide de robots, l'environnement est planifié de telle sorte que les robots peuvent répéter aveuglément les mêmes mouvements encore et encore. Ils n'ont tout simplement pas la possibilité de se tromper: les pièces de la voiture se retrouvent à chaque fois au même endroit, et les robots sont conservés dans des boîtes spéciales qui les renferment des personnes. Mais si le robot utilise des algorithmes de planification de mouvement en temps réel, il ne pourra pas être gêné par des personnes se promenant ou un dysfonctionnement du convoyeur - les robots feront leur travail avec la précision habituelle.La planification du trafic en temps réel permet d'économiser du temps et des coûts pour l'ingénierie de l'environnement du robot. Les scientifiques étudient la technologie de la planification depuis 30 ans et les progrès récents ont permis de créer un plan de déplacement amélioré en quelques secondes. Les approches existantes, à quelques exceptions près, reposent sur les capacités de processeurs centraux ou plus rapides, mais également sur des GPU plus énergivores. Selon les scientifiques, le processeur central est capable de résoudre différents types de tâches, mais il ne peut rivaliser avec un processeur spécialement conçu pour une seule tâche spécifique.Dinesh Manocha, professeur à l' Université de Caroline du Nord à Chapel Hill, qui travaille sur un planificateur de mouvement en temps réel sur les GPU, convient que les FPGA ont le potentiel d'augmenter l'efficacité de la planification de mouvement. Il est convaincu que le développement des scientifiques trouvera son application pratique dans un avenir proche: les robots sont de plus en plus utilisés dans des conditions nouvelles et incertaines, le rôle de la planification du trafic ne fera qu'augmenter avec le temps.Startup Realtime Robotics commercialisera des scientifiques en technologie. Dans le cadre de ce projet, les FPGA seront remplacés par des circuits intégrés spécialisés ( ASIC ), qui peuvent combiner plus de 100 000 fronts. Une telle mise à niveau permettra aux robots de fonctionner dans une grande variété d'environnements.
Le volume de travail est l'espace dans lequel le robot change de position d'une position à une autre.Les résultats de l'étude ont montré que la détection d'obstacles prend plus de 99% du temps de calcul. Les calculs préliminaires sont effectués lors de la configuration du robot. Vous créez une carte, qui se compose d'environ 150 000 arêtes, décrivant les trajectoires possibles du robot, tout en évitant les auto-collisions et les collisions avec des choses qui ne changent pas de position, par exemple le sexe.150 000 côtes, c'est trop pour le prototype du système d'équipe de Duke University. Un nombre plus raisonnable étant proche de 1000, les chercheurs ont donc dû trouver un moyen de réduire leur nombre.Pour accélérer et simplifier l'ensemble du processus, les chercheurs ont d'abord modélisé environ 10 000 scénarios avec différents nombres d'obstacles situés au hasard de différentes tailles, puis vérifié les bords de la carte utilisés par le système pour planifier le mouvement. Les côtes rarement utilisées ont été retirées de la carte. Après plusieurs itérations de réduction et de contrôle des résultats dans un exemple, le nombre d'arêtes s'est avéré inférieur à mille. Dans le même temps, la réduction n'a pas affecté la capacité de résoudre deux problèmes principaux du planificateur de mouvement - une vitesse de traitement lente et une consommation d'énergie élevée.Il est très important de limiter le nombre d'arêtes sur la carte à une valeur acceptable, car les capacités du processeur qui traite les opérations de planification sont limitées. Dans ce cas, le processeur - circuit intégré logique programmable ( FPGA ) - est programmé avec un réseau de circuits de détection de collision, chacun correspondant à un front sur la carte. Ainsi, la taille de la carte est limitée par le nombre de tels circuits qui peuvent tenir sur le FPGA - un maximum de plusieurs milliers.La technologie des scientifiques de l'Université Duke fonctionne en décomposant l'espace de travail en milliers de voxels. L'algorithme détermine ensuite si une trajectoire d'objet préprogrammée est intégrée dans l'un des voxels. Grâce aux FPGA, la technologie vérifie des milliers de routes en même temps, puis coud le chemin le plus court en utilisant les options de sécurité restantes. Le robot ne peut que l'exécuter.À la sortie, les scientifiques ont reçu une accélération importante: quel que soit le nombre de bords sur la carte, la vitesse de traitement du FPGA de la carte entière était de 50 nanosecondes par pixel. Dans un exemple particulièrement complexe, le traitement a pris un peu plus de 0,6 ms. L'ordonnanceur, qui fonctionnait sur la base d'un processeur quadricœur Intel Xeon avec une fréquence d'horloge de 3,5 gigahertz, a fait face à cette tâche en 2,738 ms. Les processeurs conventionnels consomment environ 200 à 300 watts d'électricité lors de la planification du mouvement, et le développement des scientifiques de l'Université Duke est inférieur à 10 watts.Désormais, les robots industriels n'utilisent pas de planificateurs de mouvement. En ce qui concerne, par exemple, l'assemblage en ligne de voitures à l'aide de robots, l'environnement est planifié de telle sorte que les robots peuvent répéter aveuglément les mêmes mouvements encore et encore. Ils n'ont tout simplement pas la possibilité de se tromper: les pièces de la voiture se retrouvent à chaque fois au même endroit, et les robots sont conservés dans des boîtes spéciales qui les renferment des personnes. Mais si le robot utilise des algorithmes de planification de mouvement en temps réel, il ne pourra pas être gêné par des personnes se promenant ou un dysfonctionnement du convoyeur - les robots feront leur travail avec la précision habituelle.La planification du trafic en temps réel permet d'économiser du temps et des coûts pour l'ingénierie de l'environnement du robot. Les scientifiques étudient la technologie de la planification depuis 30 ans et les progrès récents ont permis de créer un plan de déplacement amélioré en quelques secondes. Les approches existantes, à quelques exceptions près, reposent sur les capacités de processeurs centraux ou plus rapides, mais également sur des GPU plus énergivores. Selon les scientifiques, le processeur central est capable de résoudre différents types de tâches, mais il ne peut rivaliser avec un processeur spécialement conçu pour une seule tâche spécifique.Dinesh Manocha, professeur à l' Université de Caroline du Nord à Chapel Hill, qui travaille sur un planificateur de mouvement en temps réel sur les GPU, convient que les FPGA ont le potentiel d'augmenter l'efficacité de la planification de mouvement. Il est convaincu que le développement des scientifiques trouvera son application pratique dans un avenir proche: les robots sont de plus en plus utilisés dans des conditions nouvelles et incertaines, le rôle de la planification du trafic ne fera qu'augmenter avec le temps.Startup Realtime Robotics commercialisera des scientifiques en technologie. Dans le cadre de ce projet, les FPGA seront remplacés par des circuits intégrés spécialisés ( ASIC ), qui peuvent combiner plus de 100 000 fronts. Une telle mise à niveau permettra aux robots de fonctionner dans une grande variété d'environnements.Source: https://habr.com/ru/post/fr400079/
All Articles