Pour une raison quelconque, peu de gens en Russie connaissent la situation réelle de l'utilisation de la robotique sur le site d'urgence de la centrale nucléaire de Fukushima. Le grand public a un stéréotype sans ambiguïté:

En fait, dans divers travaux lors de la liquidation des conséquences de l'accident à la centrale nucléaire de Fukushima (j'écrirai probablement plus pour le compte des FAE), des centaines d'unités de divers robots télécommandés ont été utilisées et sont utilisées. L'échelle d'utilisation des voitures télécommandées est incomparablement plus grande qu'à la centrale nucléaire de Tchernobyl, pour la simple raison que tous ces équipements se sont considérablement développés au cours des 30 dernières années et parce que l'accident survenu à la centrale nucléaire de Tchernobyl est plus répandu qu'à la centrale nucléaire de Tchernobyl.
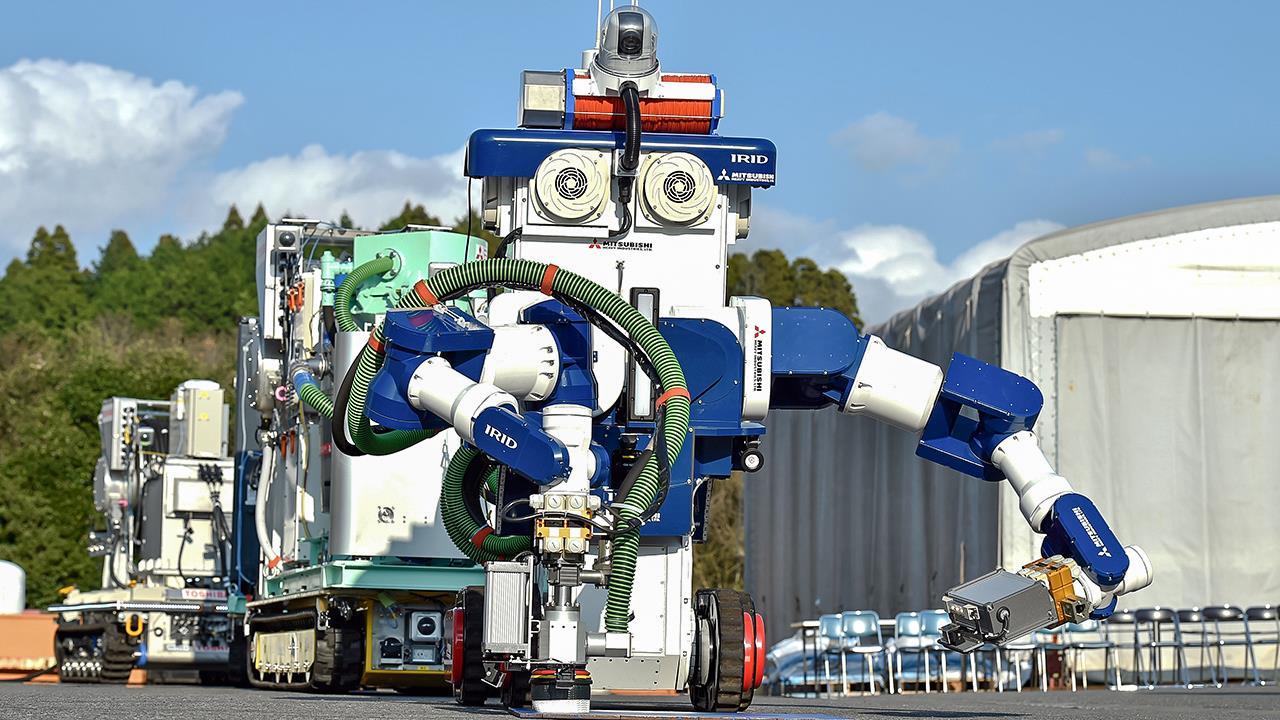 Aspirateur robot, version japonaise pour Fukushima.
Aspirateur robot, version japonaise pour Fukushima.Avant de regarder les robots, il vaut au moins en général d'imaginer que le travail a été réalisé au FAES au cours des 6 dernières années depuis l'accident.
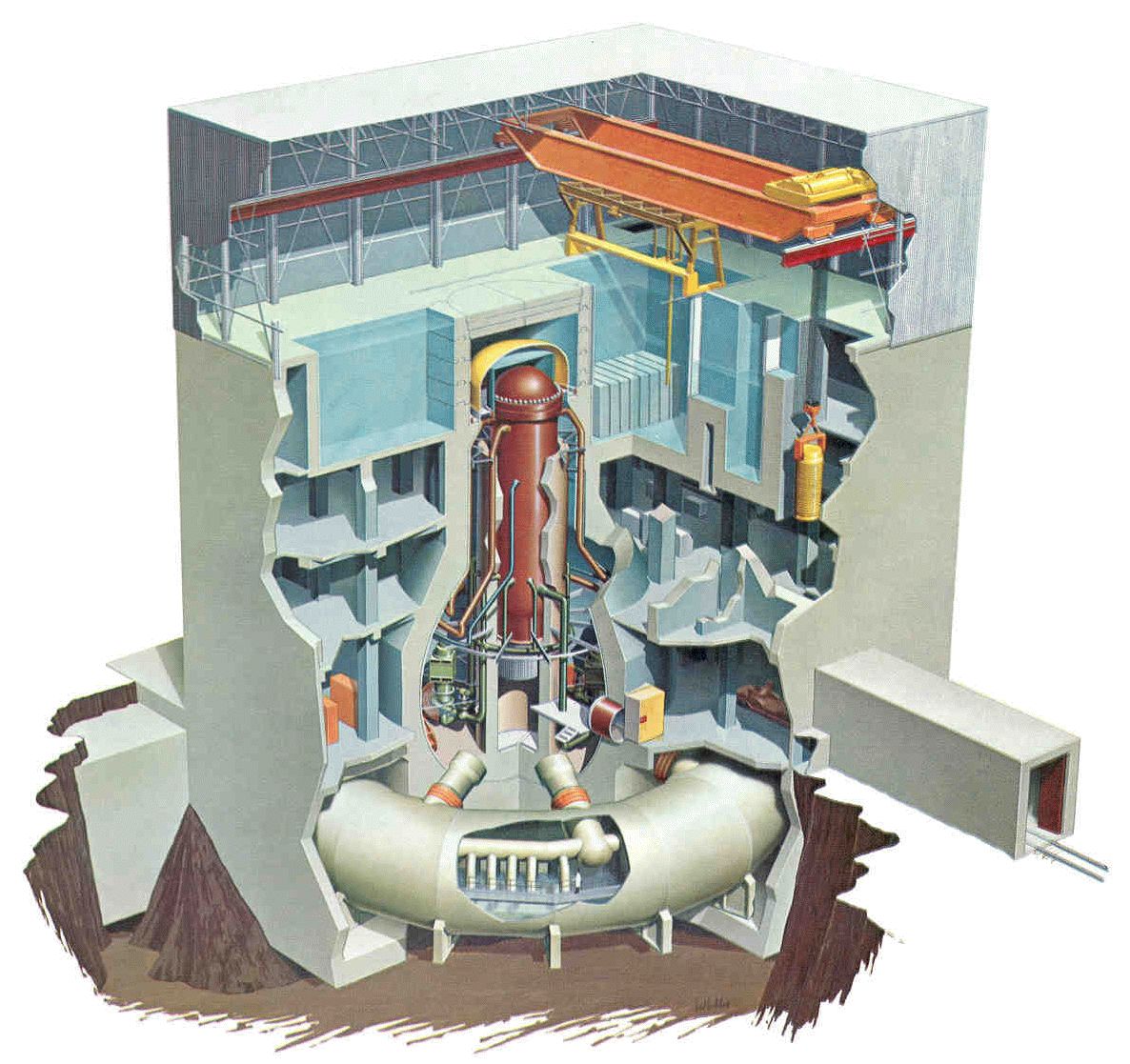 Cette image simplifiée donne une idée générale de la conception des blocs de la centrale nucléaire de Fukushima: le réacteur ici au centre (marron) est situé au centre d'un conteneur en béton en forme de poire, à l'intérieur duquel se trouvent de nombreux équipements. En haut à droite du réacteur, il y a un bassin de rétention, juste sous le réacteur, il y a une salle pour les actionneurs des barres de contrôle et de protection (contrairement au PWR, ils sont introduits dans l'AZ par le bas dans le BWR ). Au-dessous et autour du réacteur se trouve un bassin de bullage toroïdal conçu pour condenser la vapeur en cas de rupture majeure de la cuve du réacteur principal.
Cette image simplifiée donne une idée générale de la conception des blocs de la centrale nucléaire de Fukushima: le réacteur ici au centre (marron) est situé au centre d'un conteneur en béton en forme de poire, à l'intérieur duquel se trouvent de nombreux équipements. En haut à droite du réacteur, il y a un bassin de rétention, juste sous le réacteur, il y a une salle pour les actionneurs des barres de contrôle et de protection (contrairement au PWR, ils sont introduits dans l'AZ par le bas dans le BWR ). Au-dessous et autour du réacteur se trouve un bassin de bullage toroïdal conçu pour condenser la vapeur en cas de rupture majeure de la cuve du réacteur principal.Après avoir mis les réacteurs des blocs 1, 2, 3 à l'état «d'arrêt à froid» (c'est-à-dire refroidir le combustible usé dans le réacteur à 100 C et moins) au bout de 11 ans, les tâches suivantes ont été
formulées :
- Reconnaissance de la situation radiologique dans les endroits difficiles d'accès - la cuve du réacteur, le conteneur, le bulleur à bulles et autres, où, fin 2011, la situation n'était pas encore connue (principalement avec les restes du combustible en fusion)
- Réduire le flux de vent et d'eau de la radioactivité des réacteurs - en éliminant les fuites (y compris le mur de glace notoire), en recouvrant une partie des murs des bâtiments, en collectant les ordures contaminées dans des conteneurs où cela n'a pas encore été fait
- Préparation des sites de déchargement SNF des pools de stockage des 4 blocs - nettoyage des structures détruites, cartographie des débris dans les pools de stockage et leur nettoyage, organisation des structures temporaires au-dessus des pools, et enfin - déchargement SNF dans des conteneurs
- Décontamination maximale des installations (c.-à-d. Nettoyage des contaminants de surface. Cela est nécessaire principalement dans l'intérêt des travaux d'élimination du SNF - pour réduire le niveau de dose du personnel qui effectuera ce travail
- Scellement des conteneurs des réacteurs et pompage ultérieur de l'eau radioactive des bâtiments des unités de puissance
- Démantèlement des résidus de combustible fondu hautement radioactif (corium) en blocs de 1,2,3
- Après la libération des blocs des objets nucléaires et des rayonnements dangereux - démontage et organisation de la «zone verte»
 Infographie en blocs début 2016.
Infographie en blocs début 2016.L'ensemble du plan est censé être mis en œuvre dans 30 à 40 ans, et le plus difficile ici est le déchargement du combustible nucléaire irradié des piscines de stockage jonchées de débris et l'élimination du corium des restes des cuves du réacteur. Pour le moment, SNF est complètement déchargé du bloc 4 (où, heureusement, il n'était pas dans le réacteur, mais seulement dans la piscine de rétention - c'est-à-dire que le bloc 4 peut être transformé en pelouse verte assez tôt), et la construction d'une coque de protection pour les extrémités de déchargement SNF du bloc 3, il est prévu de le démarrer en 2017.
Avec les blocs 1,2, la situation est la plus difficile - ici pour la construction d'un abri pour le nettoyage SNF, il faut d'abord démonter les débris et décontaminer partiellement pour réduire les champs, ce que TEPCO (le propriétaire de la centrale nucléaire) fait maintenant.
 Vue générale du site de la centrale nucléaire de Fukushima en 2016. Au fait, il y a un bon plan expliquant tous ces chars et certains bâtiments.
Vue générale du site de la centrale nucléaire de Fukushima en 2016. Au fait, il y a un bon plan expliquant tous ces chars et certains bâtiments.Ainsi, les robots participent à absolument toutes les œuvres décrites ci-dessus. Oui, bien sûr, ce sont toutes des machines télécontrôlées, principalement des câbles, je ne vais pas me plonger dans le débat terminologique ici, considérer de tels équipements comme des robots, ou seulement autonomes, et je les appellerai des robots.
 iRobot Packbot 510 est le premier de ceux utilisés au FAES.
iRobot Packbot 510 est le premier de ceux utilisés au FAES.Dès les premiers jours de l'accident, toujours sur sa partie active, la question s'est posée de l'intelligence radiologique. TEPCO possédait une flotte de robots iRobot Packbot - une machine à grande échelle, très pratique à ces fins. Ils ont placé des dosimètres sur des pakbots (il semble que ce soit généralement l'une des options standard), des gamma caméras, des capteurs de pression, de température et d'humidité, et les ont envoyés vers et autour des blocs détruits par les explosions. Malheureusement, tout allait mal avec les pakbots en se déplaçant dans les escaliers, et ils ont effectué des reconnaissances au rez-de-chaussée et à l'extérieur des blocs.
Formation d'avril sur le site du FNPP avec le robot guerrier iRobot.Après un certain temps, ils ont été ajoutés plusieurs robots (de conception similaire) développés par le centre FuRO et l'Université Chiba - Quince, Hibiscus, Sakura, etc., selon les développeurs qui ont la meilleure intelligence / mécanique pour se déplacer sur des terrains difficiles. En effet, ces robots déjà en avril-mai 2011 ont permis de repérer les étages supérieurs des blocs, deux d'entre eux ont été perdus à cause de ruptures de câbles.
Coing en reconnaissance à l'intérieur de la deuxième unité de la centrale nucléaire de Fukushima, avril-juillet 2011.En outre, au moins un drone Honeywell T-HAWK fourni par l'armée japonaise a été utilisé pour la reconnaissance et la surveillance aériennes. Les militaires et plusieurs autres robots à chenilles de type Talon étaient également généreux. Il s'agit d'une version plus lourde et plus sécurisée de l'idéologie Packbot.

En plus de la reconnaissance, presque immédiatement, dans les premières semaines, pour l'enlèvement des décombres, l'utilisation d'équipements de construction télécontrôlés rénovés a commencé - plusieurs pelles, bulldozers, camions, qui ont réussi à dégager les passages entre les blocs des débris radioactifs.
 Robots utilisés pour nettoyer les déchets radioactifs du bloc 3 en mai-juin 2011. Y compris deux traditionnels pour l'industrie nucléaire Brokk'a
Robots utilisés pour nettoyer les déchets radioactifs du bloc 3 en mai-juin 2011. Y compris deux traditionnels pour l'industrie nucléaire Brokk'aUne application intéressante a été trouvée pour les pompes à béton robotisées Putzmeister - verser de l'eau au-dessus des blocs et observer la situation à partir d'une flèche de 70 mètres. La gestion de ces machines a été effectuée par voie aérienne à partir de locaux mobiles protégés par du plomb, installés près du lieu de travail.
 Putzmeister télécommandé avec une flèche de 62 mètres, début avril 2011, la tâche est la reconnaissance et l'approvisionnement en eau au sommet du bloc détruit.
Putzmeister télécommandé avec une flèche de 62 mètres, début avril 2011, la tâche est la reconnaissance et l'approvisionnement en eau au sommet du bloc détruit.Je pense que l'apparition instantanée d'un tel équipement sur le site du FNPP est due au fait qu'au cours des 10 dernières années, il est devenu populaire d'ajouter la possibilité de contrôle externe de la télécommande aux machines de construction, c'est-à-dire contrôle essentiellement entièrement électronique à l'intérieur, qui est déjà facile à apporter à au moins un autre hémisphère de la Terre. Avec une telle technique, il suffit de l'accrocher avec des caméras et de s'équiper du bon canal de télécommunication, et un robot télécommandé est prêt. Malheureusement, en 1986, pour parvenir à un tel résultat, il fallait se tourmenter, et en fait le problème n'était pas résolu - la vitesse d'élimination des conséquences de l'accident s'est avérée plus importante que la charge de dose des personnes.

Enfin, depuis 2011, la technologie à distance résistante aux radiations, standard pour l'industrie nucléaire, est également utilisée sur le site de la FAES: des robots BROKK lourds (plus d'une tonne!) Et des manipulateurs de chariot mobile Walischmiller - essentiellement sur le démantèlement des déchets radioactifs, travaillant dans les plus chaudes des points.
Curieusement, tous ces équipements n'avaient pas de problèmes spécifiques associés aux rayonnements - enfin, ou ils étaient en quelque sorte étouffés (ce qui est douteux). Cependant, la robotique non protégée était utilisée dans les champs bas (pas plus de 15 rayons X par heure), et pour des conditions plus sévères, une protection au plomb était parfois placée sur l'électronique (par exemple, 3 pompes à béton télécommandées Putzmeister, qui se tenaient près des blocs détruits par des explosions et versaient de l'eau par le haut)
 La situation radiologique le 23/03/2011 - une semaine après la fin de la phase active de l'accident. Le chiffre le plus élevé de 130 mSv est de 13 R / h, contre ~ 1000 R / h sur le site de Tchernobyl le 6 mai.
La situation radiologique le 23/03/2011 - une semaine après la fin de la phase active de l'accident. Le chiffre le plus élevé de 130 mSv est de 13 R / h, contre ~ 1000 R / h sur le site de Tchernobyl le 6 mai.Cependant, un point important doit être noté ici. Aucun équipement série ou semi-série n'a été envoyé dans la cuve du réacteur ou au fond du conteneur, où des champs jusqu'à 50 000 tr / h ont été mesurés par la suite. Pour de telles tâches, et d'autres spécifiques, telles que la décontamination de grands volumes, la reconnaissance sous l'eau, l'élimination des débris des piscines de stockage de combustible irradié, les sociétés japonaises ont depuis 2011 mené le développement d'une grande variété de mécanismes, dont beaucoup ne sont mis en service qu'aujourd'hui. Regardons-les:
 Coureur de l'enquête et FRIGO-MA
Coureur de l'enquête et FRIGO-MACommençons par une version plus compacte de la cinématique de Pakbot - TOPY's Survey runner. Pas un robot très intéressant, cependant, a rampé dans les sous-sols de blocs en 2012. Une version encore plus petite de ce système appelé FRIGO-MA, ainsi qu'un étrange robot à quatre pattes de Toshiba qui pourrait produire une reconnaissance plate séparée, ont été utilisés pour contrôler les fuites de la tuyauterie de la tuyauterie du réacteur (pendant un certain temps, la tâche de trouver des endroits de fuite d'eau de refroidissement était extrêmement importante pour les liquidateurs).
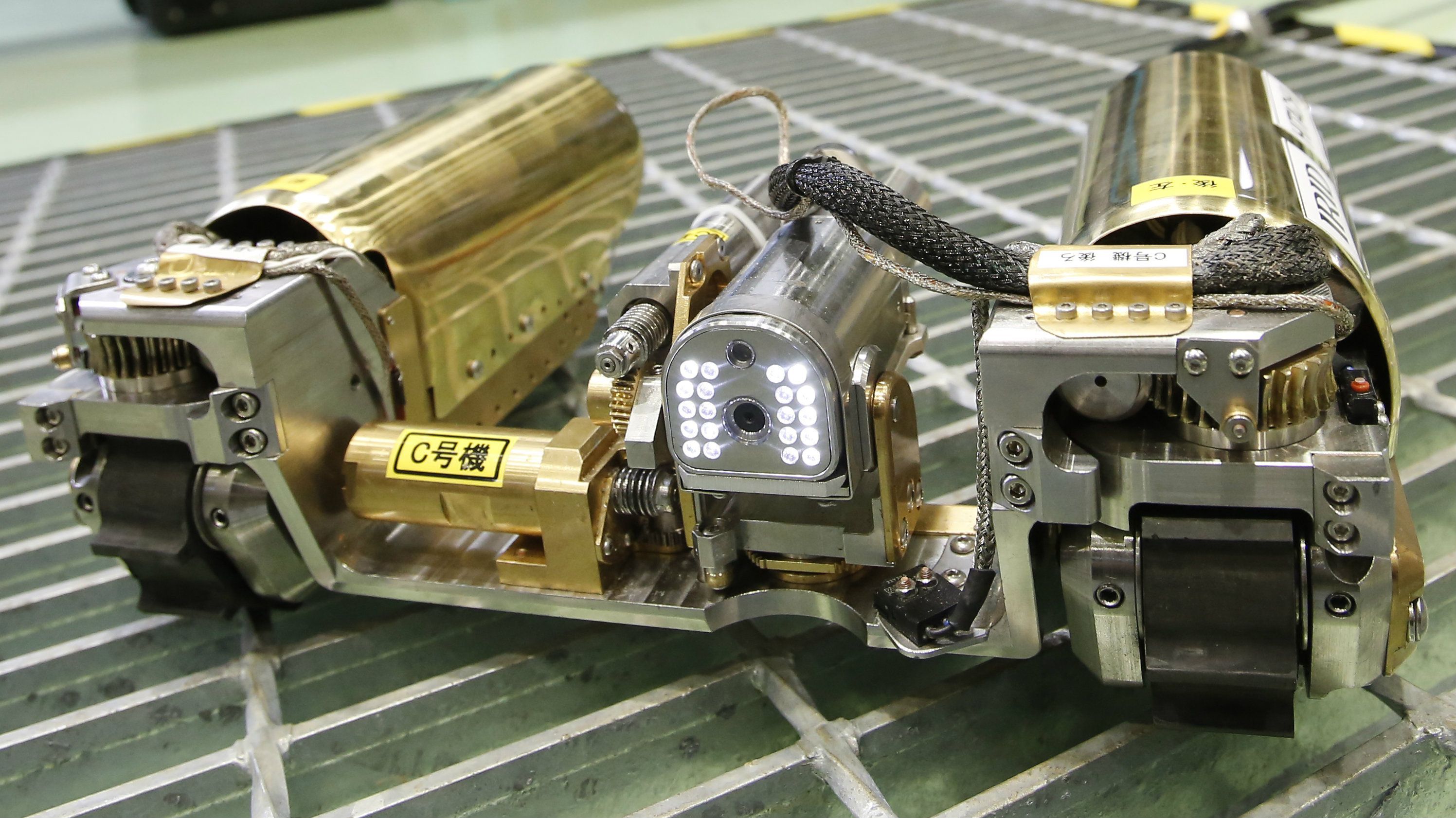
Scorpion, un scout encore plus petit et plus robuste, a développé Toshiba - et ce robot est entré dans des barboteurs et des réacteurs à conteneurs (et il semble que l'un des scorpions soit devenu le premier robot à être reproduit par les médias).
Test de «Scorpion» sur la disposition du bloc de contenu 2. Il est intéressant de noter que de nombreux modèles différents ont été construits pour envoyer des robots, qui reproduisaient de manière assez fiable de nombreux éléments de la conception des centrales nucléaires.Soit dit en passant, à la question des petits scouts. J'ai aimé la photo de ce robot - devinez ce qui est utilisé comme appareil photo

Le rival de Toshiba Scorpion était le changeur de forme d'Hitachi, un design plutôt étonnant avec une cinématique intéressante. Deux robots de cette version ont été envoyés dans la partie inférieure du conteneur, ont effectué des reconnaissances dans les champs de ~ 500 r / h (5 Sv / h), et y ont trouvé des embruns de corium.

Ce sont eux qui sont devenus le héros de l'actualité de l'année dernière "TEPCO a envoyé des robots dans le réacteur, et ils sont morts des radiations" - en fait, le premier robot vient de se coincer, mais le second est vraiment tombé sur un morceau de SNF avec un champ de 5000-8000 r / h et l'électronique a refusé (l'ironie du sort ici est que le terme «rester conscient» dans une voiture s'est avéré très similaire à une personne). Soit dit en passant, malgré la mort, ces robots ont compris une chose assez importante - dans le conteneur du conteneur de l'unité 1, l'eau est à un niveau assez élevé, ce qui signifie qu'elle est étanche.
Vidéo filmée par l'un de ces scouts.Cependant, contrairement à une personne, les ingénieurs ont la possibilité, face à un problème, d'essayer de le résoudre en inventant une nouvelle option. Toshiba teste maintenant une version du même petit scout Scorpion, équipé d'un microbranch et d'un micro-couteau pour pousser des morceaux de corium. En général, les voitures neuves se rapprochent de plus en plus de la zone principale inexplorée - lieux de pénétration de la cuve du réacteur et du corium conteneur, et cartographient l'emplacement du corium sous le réacteur dans les blocs 1,2,3.
Pour le moment, à partir de méthodes non distantes, TEPCO n'a réussi qu'à abaisser la caméra résistante aux radiations du bloc n ° 2 au corium et à mesurer le DER à 530 Sv / h (soit 53000 r / h). Un tel débit de dose ne nous permet pas d'espérer que la tâche de reconnaissance / cartographie sera simple - l'électronique existante, même résistante aux radiations devient trop peu fiable dans de telles conditions, et il est impossible de la protéger dans un petit robot.
Soit dit en passant, dans le cadre d'ITER, une ligne de microcircuits résistants aux rayonnements (ADC, DAC, interfaces numériques, logique) est en cours de développement en Europe pour environ ces conditions de travail. Un autre exemple de la façon dont un projet «sans valeur» donne des résultats concrets.
Pour conclure sur le thème de la reconnaissance, il convient de mentionner que TEPCO a utilisé plusieurs robots sous-marins autonomes en série et un petit bateau télécommandé pour la reconnaissance des sous-sols remplis d'eau.
La deuxième tâche principale de l'armée de robots TEPCO a été et reste l'analyse des blocages, principalement dans le cadre de la suppression de SNF. Comme je l'ai écrit ci-dessus, la FAEC utilisait initialement les produits standard BROKK et Walischmiller pour l'industrie nucléaire et les équipements de construction télécommandés. Cependant, Hitachi a rapidement développé un ASTACO-SoRa spécial de type BROKK (c'est-à-dire un robot à chenilles lourd avec une puissance autonome provenant d'un moteur à combustion interne).
Sous l'apparence d'ASTACO-SoRa, il y a quelque chose dans les images de l'anime japonais.Sa tâche consistait à démanteler les débris de câbles - un objet complexe pour le démontage standard des bras robotiques, qui se trouve souvent dans les centrales nucléaires. Parallèlement aux ASTACO-SoRa spéciaux et aux BROKK résistants aux radiations, des robots de démontage Husqvarna DXR-140, DX-250 et DX-310 ont été utilisés. Comment, vous ne saviez pas que husqvarna produit des destroyers?
 Acceptation de Husqvarn en 2012 à la centrale nucléaire de Fukushima.
Acceptation de Husqvarn en 2012 à la centrale nucléaire de Fukushima.Pourquoi aviez-vous besoin de tels appareils? Permettez-moi de vous rappeler que dans le cadre de l'événement principal d'aujourd'hui, à savoir l'extraction du combustible nucléaire irradié des piscines de stockage, il est nécessaire de démonter les débris autour des piscines, de construire des abris et de se préparer en général. Et ce n'est pas partout que l'environnement de rayonnement permet aux gens de le faire, de sorte que l'abondance de ces tâches vers le démantèlement des robots est compréhensible, bien que le rythme de travail diminue assez fortement.
 Encore une fois, dans cette tâche, avec toutes sortes de robots maladroits et lents, des équipements de construction télécommandés fonctionnent.
Encore une fois, dans cette tâche, avec toutes sortes de robots maladroits et lents, des équipements de construction télécommandés fonctionnent.Soit dit en passant, sur le rythme, une petite digression. En 1986, les robots se déplaçaient encore plus lentement, étaient encore moins précis et fiables, et chaque jour de retard dans le stockage du combustible nucléaire irradié du toit de la centrale nucléaire de Tchernobyl 4 conduisait à l'élimination supplémentaire des radionucléides - par le vent et l'eau. C'est pourquoi, essayant de terminer les tâches de nettoyage avec des robots, et en veillant à ce qu'il soit trop lent, les liquidateurs de l'accident de Tchernobyl sont revenus à la réalisation de cette tâche par des personnes. La lenteur et le manque de fiabilité de la robotique sont devenus la principale raison de sa petite utilisation, et non du rayonnement et des «conditions terribles», comme les développeurs de ces robots aiment à le dire. Pour preuve, je vais vous donner un morceau de vidéo documentaire:
Mais revenons à Fukushima. Parallèlement au démantèlement des débris et au transport des déchets radioactifs solides dans des conteneurs sur des blocs contaminés, il y avait (et il y a) une autre tâche désagréable - la décontamination des murs, des sols, des plafonds, etc. - tous les éléments structurels qui ne peuvent pas être simplement retirés du lieu des travaux futurs. Les radionucléides rejetés pendant la phase active de l'accident se sont installés sur ces surfaces - quelque part où ils peuvent être lavés et quelque part où ils doivent être retirés. Une bonne option est le jet de glace - bombardement de surfaces avec des particules de glace sèche (à partir de CO2), suivi d'une aspiration sur le filtre de tout ce qui s'est passé. Cependant, le système lui-même pour un tel nettoyage est plutôt lourd - au début, ils ont essayé de l'installer sur le même Husqvarna DXR-140 pesant 985 kg, mais le résultat n'était pas très bon. Mais nous sommes au Japon! Patrie d'étranges robots! Et le résultat a dépassé toutes les attentes.
Le train robotisé se compose de quatre chariots, dont le premier est équipé d'un manipulateur de décontamination, tandis que les autres transportent un système de génération de glace carbonique, un aspirateur, des filtres, divers liquides de nettoyage, etc.En général, une dizaine de mécanismes spécialisés ont été créés pour la tâche de décontamination, dont le plus facile à nettoyer le sol et le plus étrange à nettoyer le plafond. Dans le même temps, pour autant que vous puissiez comprendre, les résultats ne sont pas des tests, mais le vrai travail sur les blocs est encore assez modeste et ressemble plus aux mêmes tests, que dans le monde réel. Y compris, le train megarobo montré ci-dessus n'a pas encore été lancé en blocs (semble-t-il).
Technologie de décontamination - un manipulateur monté à l'extrémité d'une échelle rétractable télécommandée?
Un autre exemple d'une étrange machine de décontamination.
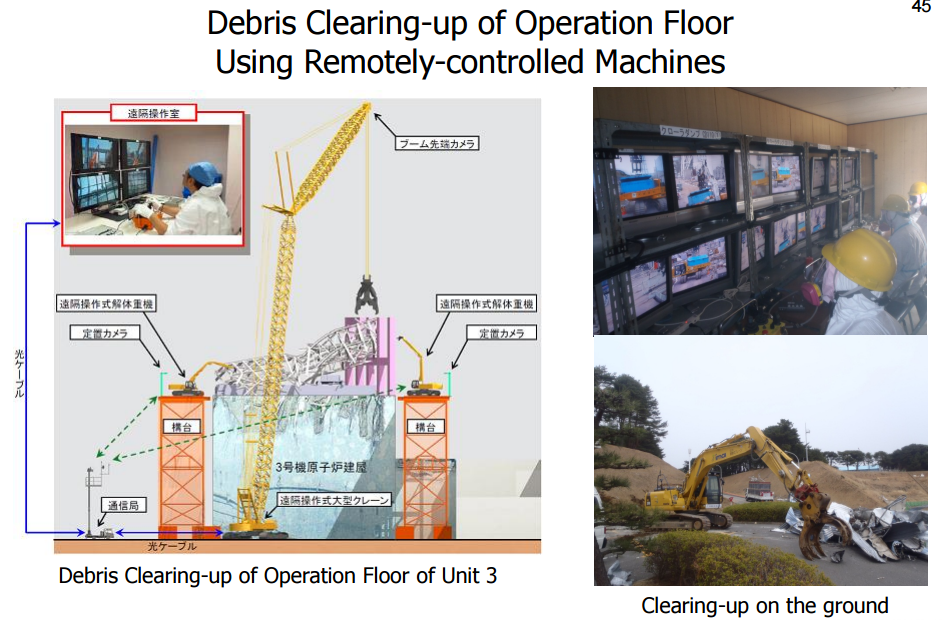
Enfin, la dernière tâche la plus importante pour laquelle les Japonais conçoivent des robots télécommandés est de nettoyer les bassins d'exposition. Cette tâche est la plus difficile car ici, en plus des structures instables dans les eaux boueuses, il faut faire face à de grands champs de rayonnement (en particulier ramasser les ordures sur les étagères avec du combustible nucléaire usé) et le danger d'épidémies de réaction en chaîne - par exemple, si vous laissez tomber un assemblage de combustible sur un autre, c'est tout à fait possible.
Vidéo tournée par un véhicule sous-marin dans la piscine d'exposition du troisième bloc. Sous ces ordures, il y a plusieurs centaines de tonnes de combustible usé!Pour résoudre ce problème, un complexe assez grand a été créé à partir d'un robot sous-marin télécommandé avec deux manipulateurs suspendus à un pont roulant et divers appareils de levage. TEPCO prévoit de commencer à utiliser ce complexe dès 2017 lors du nettoyage du combustible usé de la troisième unité, où le déchargement SNF devrait commencer en 2018.
Pour résumer, je voudrais noter ce qui suit:
1. La liquidation des conséquences de l'accident de la centrale nucléaire de Fukushima est devenue un lieu d'utilisation massive d'équipements télécontrôlés, principalement dans les missions de reconnaissance et de cartographie.
2. Les robots série existants ne peuvent pas faire face aux tâches de liquidation elles-mêmes (et de reconnaissance dans les endroits difficiles).
Pendant deux ou trois ans après l'accident, de nombreuses nouvelles variantes d'équipements ont été développées - il est clair qu'une recherche est en cours pour trouver des formulaires performants et efficaces pour travailler dans des conditions d'accidents radiologiques dans des installations industrielles. Au total, en passant, j'ai compté 43 types de voitures télécommandées qui tombaient dans les cadres des rapports TEPCO.3. Le travail des machines télécommandées est beaucoup plus lent qu'avec l'aide de personnes. C'est un problème bien connu, qui est lié à la fois à la cinématique et à la mobilité des robots eux-mêmes, et à la difficulté à percevoir la situation par l'opérateur à travers des caméras distinctes: aujourd'hui, ils essaient de résoudre le deuxième problème à l'aide de la réalité augmentée et virtuelle, mais ces cloches et sifflets à la mode n'ont pas encore atteint le FAES ( mais sont activement utilisés dans le développement des universités).PS Pour une raison que je ne comprends pas, certaines vidéos ne sont pas prises, si quelqu'un peut conseiller quelque chose - conseiller.