
Dans l'article, nous considérons la partie électronique du nouveau quadricoptère Geoscan Pioneer, qui est conçu pour enseigner la robotique. Nous parlerons de la création d'un hélicoptère, ou plutôt de l'expérience que nous avons acquise et des changements que nous avons apportés au projet. En fin de compte, partagez les plans pour l'avenir.
1. Pourquoi créer un quadricoptère pour la formation en Geoscan
Pour résoudre de nombreux problèmes appliqués, les véhicules aériens sans pilote (UAV), en particulier les systèmes multi-rotors, sont de plus en plus utilisés. Leur présence peut être observée dans de nombreux domaines, par exemple, dans la photographie aérienne, la livraison de marchandises, la prise de vue vidéo depuis les airs, la surveillance d'objets, ainsi que dans les courses (courses de drones).
Cependant, dans l'industrie en développement rapide des avions sans pilote, il y a une pénurie de personnel professionnel. Le personnel technique est mieux préparé à partir de l'école. Seules toutes les étapes passées: de la conception à l'exploitation et à la modernisation - peuvent devenir un véritable professionnel dans leur domaine et donner un autre tour dans le développement de l'industrie, à la fois en termes de technologie et en termes d'implication d'un nombre croissant de domaines connexes dans l'industrie et de résolution d'un nombre croissant de problèmes appliqués .
On peut affirmer que l'utilisation du quadricoptère par des écoliers, des étudiants et des amateurs comme robot volant pour apprendre les bases du développement, du fonctionnement et de la modernisation des drones est un sujet intéressant pour nous. En conséquence, cela peut conduire à la création d'une base pour un nouveau standard éducatif.
Nous pensons que les sujets suivants sont les plus intéressants à étudier:
Programmation de systèmes de contrôle, création d'algorithmes d'orientation et de navigation dans l'espace, reconnaissance de l'environnement;
Electronique - connecter des capteurs et étudier les principes de leur travail, étudier la structure des systèmes aéronautiques;
La conception du cadre et de la mécanique, ainsi que l'étude des paramètres électromécaniques de l'hélicoptère pour optimiser les modes de vol lors de la résolution de différents problèmes;
Contrôle de l' hélicoptère en mode pilote et en mode opérateur UAV. Autrement dit, manuellement ou automatiquement.
Ainsi, de nombreuses tâches intéressantes se forment qui peuvent être laissées à résoudre pour la jeune génération dans le cadre des cercles éducatifs, des concours et des olympiades.
Sur la base de ce qui précède et de l'expérience existante dans la création de drones chez Geoscan, nous avons décidé de mettre ces idées en pratique en créant un logiciel et une plateforme électronique.
Il convient de noter que pour programmer simplement un robot volant, vous avez besoin d'un système de navigation. Et si dans la rue ce problème est résolu par l'utilisation de la navigation par satellite, alors à l'intérieur ce problème n'a pas de solution claire. Étant donné qu'il est loin d'être toujours possible de travailler dans la rue en raison des conditions météorologiques, du terrain environnant ou de la sécurité, la navigation intérieure devient un incontournable. Le système de navigation que nous avons choisi sera décrit ci-dessous.
2. La première version de l'électronique de l'hélicoptère "scolaire"
Pour créer un petit hélicoptère, il est nécessaire de réduire au minimum la masse et les dimensions de l'électronique. Pour ce faire, il est logique d'appliquer une solution à carte unique contenant un pilote automatique (AP) avec des capteurs, des contrôleurs de moteur, des communications radio, des alimentations et les connecteurs nécessaires. La "carte unique" simplifie la combinaison de l'électronique avec le cadre et réduit le nombre de fils au minimum.
Les moteurs sans balais sont utilisés en raison d'un certain nombre d'avantages par rapport aux moteurs sans balais. De tels moteurs sont plus efficaces et plus fiables, et le couple important de poids relativement léger vous permet d'abandonner l'utilisation d'une boîte de vitesses sur la vis. Une certaine difficulté est le développement de variateurs de vitesse pour moteurs brushless. Mais grâce à l'expérience dans le développement de drones «adultes», cela n'est pas devenu un gros problème. Parmi les inconvénients du groupe hélice-moteur sélectionné, seul le coût des moteurs et des régulateurs peut être noté, mais il est justifié par le temps de vol, les bonnes caractéristiques de vitesse de l'hélicoptère, la capacité de déplacer une charge utile plus importante, et a également moins à se soucier d'acheter et de remplacer des moteurs défectueux.
Ainsi, nous avons abordé la création d'un prototype de carte pour un petit hélicoptère. Nous n'accorderons pas beaucoup d'attention à ce forum, mais notons seulement ses principales lacunes, qui ne sont pas rares, principalement en raison du temps de développement très modeste de trois semaines.
Lors de la conception initiale, je voulais essayer la fonctionnalité maximale de l'hélicoptère, de sorte que le magnétomètre et le module de navigation par satellite ont été placés sur la carte, ce qui s'est avéré inopérant en raison d'une compatibilité électromagnétique insuffisante avec la carte. Le magnétomètre était trop proche des conducteurs de puissance et lorsque le courant a traversé le conducteur, le magnétomètre a donné des informations incorrectes. En raison de la zone d'écran insuffisante de l'antenne en céramique, le récepteur GPS a trouvé un nombre insuffisant de satellites pour la navigation.
Pour faciliter la connexion d'un quadricoptère à un ordinateur, un modem Wi-Fi a été utilisé. L'utilisation de cette interface pour la télémétrie et le contrôle est problématique si elle est censée fonctionner dans un environnement bruyant, par exemple lors d'expositions ou d'autres événements publics où il y a beaucoup d'appareils à 2,4 GHz. De plus, le module a montré un fonctionnement réseau instable.

Du point de vue du fonctionnement, tout ne s'est pas non plus déroulé sans problème. Tout d'abord, les fils de phase des moteurs devaient être soudés à la carte, car il n'y avait pas de connecteurs pour eux. La difficulté réside dans la nécessité d'avoir des compétences pour travailler avec un fer à souder et la capacité de mélanger l'ordre des fils, ce qui conduit à un mauvais sens de rotation du moteur, et complique également le montage-démontage. Deuxièmement, il n'a pas été possible de réaliser des trous de montage pratiques sur la carte, ce qui a nui à la fiabilité et à l'aspect pratique de la fixation de la carte au cadre. Troisièmement, le connecteur d'interface sous la forme de "broches" standard avec un pas de 2 mm n'est pas toujours pratique à utiliser lors de la connexion de plusieurs appareils.
Entre autres choses, les dimensions de la carte se sont avérées plus grandes que prévu en raison de l'installation unilatérale d'éléments (à l'exception d'un petit nombre d'éléments de régulateur sur la face inférieure).

Néanmoins, l'hélicoptère s'est avéré être un travailleur. Le pilote automatique du micrologiciel et les régulateurs ont été transférés de notre
«gros» hélicoptère . Après avoir légèrement ajusté les coefficients des boucles de contrôle, nous avons fait du copter un excellent travail avec sa tâche principale - voler. Avec des moteurs 1306 3100 kV, des vis 5 "et une batterie LiPo 2s 1300 mAh, l'hélicoptère vole pendant 15-16 minutes, et avec GoPro3 (80 g) - environ 10 minutes.
Un vol a été implémenté dans un système de navigation à ultrasons (US) de
Marvelmind . Le système se compose de deux types de balises à ultrasons: stationnaire et mobile. Dans le même temps, la balise mobile du système monté sur l'hélicoptère donne 3 coordonnées de position au pilote automatique avec une précision suffisamment faible (± 5-10 cm) et le système de contrôle que nous avons créé combine ces données avec les données du gyroscope et de l'accéléromètre, et contrôle la position spatiale de l'hélicoptère.
3. Idées pour créer une nouvelle version
À l'approche de la nouvelle version de la carte, il est devenu évident pour nous qu'un certain nombre d'améliorations étaient nécessaires. Nous avons réfléchi plus en détail au concept du projet, au fur et à mesure qu'une vision complète des domaines et des modalités d'utilisation de l'hélicoptère apparaissait. L'idée principale était la décision de ne laisser que les composants nécessaires sur la carte et de faire une sorte de «carte mère», à laquelle les modules qui spécifient le but fonctionnel de l'hélicoptère seront connectés. Un exemple d'un tel module est un récepteur satellite avec une boussole pour la navigation dans la rue.
Maintenant, la nouvelle carte contient le contrôleur AP principal avec des capteurs - un accéléromètre, un gyroscope et un baromètre. Le baromètre est nécessaire pour le mode de maintien d'altitude, ce qui simplifie considérablement le contrôle de l'hélicoptère avec un contrôle manuel. Pour stocker les journaux de vol et les paramètres du pilote automatique, nous utilisons une puce de mémoire flash distincte.
Tous les composants électroniques sur la carte et les modules d'extension sont alimentés par trois convertisseurs de tension: 5 V (pour les modules, les LED, les récepteurs PPM / SBUS), 3,3 V (pour les modules et les microcircuits sur la carte) et 3,3 V séparément pour les capteurs. La tension d'entrée est de 6 V à 14 V, ce qui correspond à une batterie lithium-polymère avec deux à trois «banques» (2s-3s).

La communication avec un PC se fait via un canal radio ou USB. Pour réduire le temps de développement, nous avons utilisé le module radio
Radiocraft 868 MHz prêt à l'emploi avec une puissance de 25 mW.
Le module radio est équipé d'une antenne à puce sur la carte, ainsi que d'un connecteur pour connecter une antenne externe. Cependant, pour utiliser le connecteur d'antenne externe, vous devez travailler avec un fer à souder. On suppose que l'utilisateur de la puce aura suffisamment d'antennes à puce. Pour connecter le PC à l'hélicoptère par radio, vous devez utiliser le modem USB réciproque fourni dans le kit.

Les LED contrôlées par WS2812B RGB agissent comme des indicateurs de divers événements. Il est possible de connecter des LED supplémentaires, à l'exception de celles de la carte.

Les contrôleurs de vitesse du moteur sont capables de résister à un courant de 20 A et ont la capacité de freiner activement, ce qui affecte positivement la dynamique de contrôle de l'hélicoptère.
La tension d'alimentation se situe dans les batteries LiPo 2s-3s. Les régulateurs sont connectés à l'AP via UART, et non via un signal PWM. Cela a un bon effet sur l'immunité au bruit. La taille des régulateurs est réduite, par rapport à la première version, grâce à des boîtiers de composants électroniques plus compacts. De plus, nous avons fait l'installation bidirectionnelle de composants, ce qui nous a également permis de réduire la taille de la carte.

Il y a maintenant des trous de montage «humains» sur la carte pour un montage facile sur le châssis.
Il existe des connecteurs plus utiles. Maintenant, vous n'avez pas besoin de souder les fils des moteurs à la carte. Les modules d'extension sont connectés via deux connecteurs sur le dessus de la carte, et vous ne pouvez pas confondre la position du module en raison du nombre différent de broches et de la conception du connecteur lui-même.
Les connecteurs TE Micro-MaTch sont sélectionnés pour leur protection contre les dommages mécaniques. Contrairement aux broches de 2,54 mm, elles ne sont pas si facilement endommagées en cas de chute ou de mauvaise manipulation. Vous pouvez également connecter des modules via une rallonge pour permettre au module d'être exécuté, par exemple, dans l'hélicoptère. Les interfaces suivantes sont connectées à ces connecteurs: UART, SPI, I2C, plusieurs GPIO, un signal pour connecter des LED contrôlées supplémentaires et une alimentation de 3,3 V et 5 V.Le niveau logique des interfaces est de 3,3 V par défaut, mais peut être changé en 5 V si vous le souhaitez.
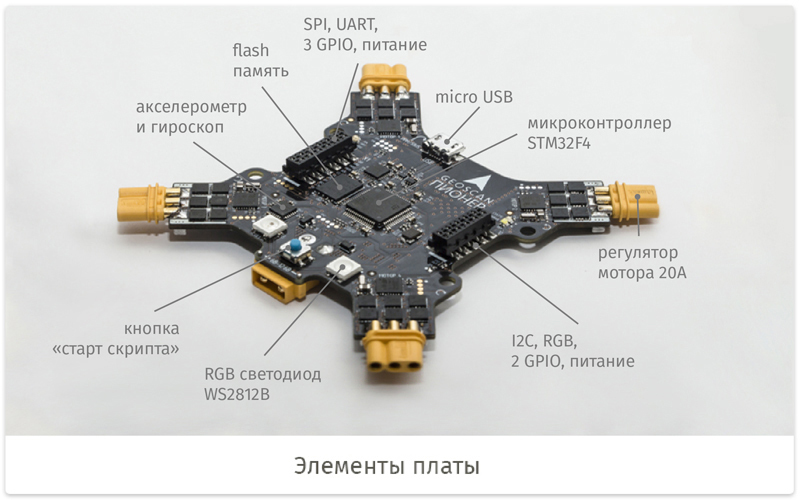
Le bouton est programmé par l'utilisateur ou utilisé par défaut pour exécuter le script.
Un peu sur le composant logiciel de la plateforme. Le micrologiciel du microcontrôleur du pilote automatique STM32F4 est écrit en C ++ et fonctionne sur RTOS
NuttX . Le firmware est fermé, mais l'utilisateur peut écrire son code dans le langage de script
Lua .
En général, nous avons choisi parmi plusieurs langages de script: Python, JavaScript (
IoT.js ) et Lua. L'implémentation Python standard est difficile à utiliser sous MK, en raison de sa taille trop grande. Nous avons envisagé l'option avec MicroPython, mais cela n'a pas fonctionné en raison de la possibilité d'accéder directement aux instructions de l'assembleur. Et nous ne voudrions pas leur donner accès à l'utilisateur moyen. JavaScript a une fonctionnalité redondante et, pour éliminer l'excédent, devrait fonctionner. Lua est un langage très populaire, facilement extensible en C ++, et possède des implémentations qui nous conviennent.
Le script peut contenir des algorithmes de contrôle ou simplement une séquence d'actions, la réception et le traitement de données provenant de capteurs, la gestion de la charge utile, etc. En général, un large éventail de fonctions d'interaction avec un robot volant est fourni, qui peut être utilisé pour des tâches de recherche, compétitives ou amateurs. Le script peut être écrit et téléchargé sur l'hélicoptère à l'aide d'une application spéciale, mais vous pouvez également générer du code à l'aide de
Google Blockly .
Vous pouvez télécharger le script via un câble USB ou un canal radio. L'application sur le PC affiche des informations de télémétrie, ce qui vous permet de juger de l'état de l'hélicoptère. Et, bien sûr, il existe des commandes et des paramètres pour le robot.
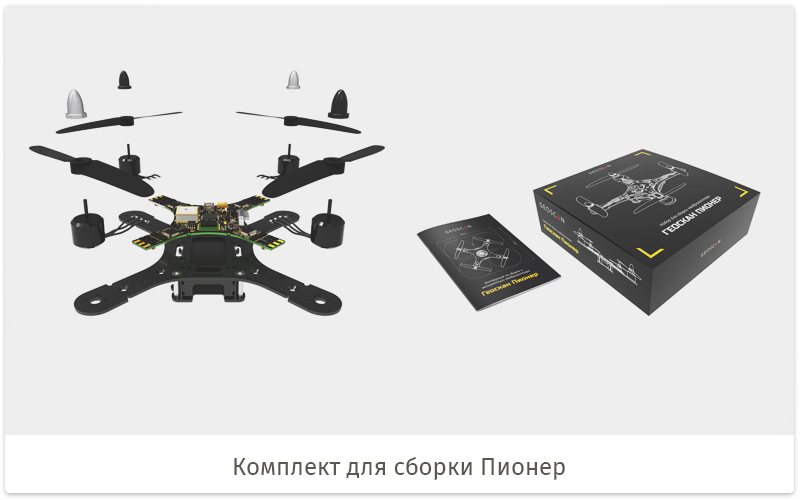
Le cadre est actuellement en fibre de carbone ou en fibre de verre par fraisage de plaques. Il est assemblé à partir d'un petit nombre de pièces et possède un compartiment à piles.
En option, vous pouvez mettre le châssis et la protection des vis. Maintenant dans le développement d'un cadre en plastique, qui sera fabriqué en utilisant la technologie d'injection.

4. Nous étendons les fonctionnalités avec des modules
Comme mentionné ci-dessus, la carte a la possibilité de se développer à l'aide de plug-ins. Les modules principaux sont les suivants:
Le module de navigation est un récepteur pour son propre système de positionnement pour l'échographie intérieure.
 Module GPS
Module GPS - positionnement satellite dans la rue. Il a également un magnétomètre à bord pour l'orientation du cours.
 Module ToF
Module ToF - reçoit des informations de plusieurs capteurs de distance
ToF dirigés dans différentes directions, ce qui permet de détecter les obstacles.
 Module de charge
Module de charge - équipé d'une capture de charge électromagnétique et de LED pour les effets d'indication et d'éclairage.
 Le module Marvelmind
Le module Marvelmind est un adaptateur pour le système de positionnement Marvelmind.
 Le module OpenMV
Le module OpenMV est un adaptateur pour la caméra pour la vision par ordinateur
OpenMV .
Module sonar - permet d'obtenir la hauteur à l'aide d'un capteur à ultrasons.
Module WiFi - ajoute une interface WiFi.
Module Bluetooth - ajoute une interface Bluetooth.
Bien sûr, de nombreux autres modules que nous prévoyons de créer à l'avenir sont possibles.
5. Application pratique et plans futurs
Vidéo promotionnelle Geoscan PioneerNous avons effectué plusieurs livraisons du Pioneer à divers établissements d'enseignement. Ils ont été effectués sur la base de la première version de la carte, de sorte que les livraisons étaient de nature plus expérimentale. Néanmoins, l'hélicoptère était tout à fait approprié en tant que concepteur d'assemblage et pour enseigner les compétences de pilotage.
Des compétitions de pilotes ont eu lieu avec la participation de Pionniers à Alferievo lors de la conférence
Aeronet 2016 .
Comment le robot volant Pioneer a attiré l'attention au festival
Robofiniste de robotique. Il y a un test avec un vol de huit, qui, en fait, l'hélicoptère a réussi à faire face. Le système a fonctionné sur la base d'une navigation par ultrasons.

Une plate-forme a été réalisée avec un espace sécurisé sous la forme d'un cadre avec une grille, où tous les visiteurs du festival ont eu la possibilité de contrôler l'hélicoptère. Dans le même temps, le système de contrôle n'a pas permis de sortir l'hélicoptère de la zone autorisée.
Aujourd'hui, nous travaillons sur la production des premiers lots de Pionniers, nous développons de nouveaux modules d'extension, nous concevons un cadre en plastique pour le moulage et nous achevons la création de notre système de navigation par ultrasons. Une présentation de notre Pioneer est également prévue. Vous pouvez vous renseigner sur le lieu et l'heure sur le site Web de Geoscan.