 Ces trois robots sont les prédécesseurs d'Astrobee. Ils ont réussi quelques tests sur l'ISS, mais ils n'ont aidé personne.
Ces trois robots sont les prédécesseurs d'Astrobee. Ils ont réussi quelques tests sur l'ISS, mais ils n'ont aidé personne.La NASA utilise des robots sur la Station spatiale internationale depuis 2006. Depuis plus de 10 ans, différents systèmes ont été testés à l'ISS. L'un des projets les plus inhabituels s'appelait SPHERES (Synchronized Position Hold, Engage, Re-orient, Experimental Satellites). Dans le cadre de ce projet, la NASA a testé un trio de robots qui ont passé plus de 600 heures à la station. Pendant ce temps, les ingénieurs et les scientifiques ont pu mener un grand nombre d'expériences, y compris l'interaction de robots en fonctionnement autonome, la cartographie et la navigation. Dans le même temps, ces robots n'ont pas été conçus pour effectuer des travaux pratiques susceptibles d'aider les astronautes.
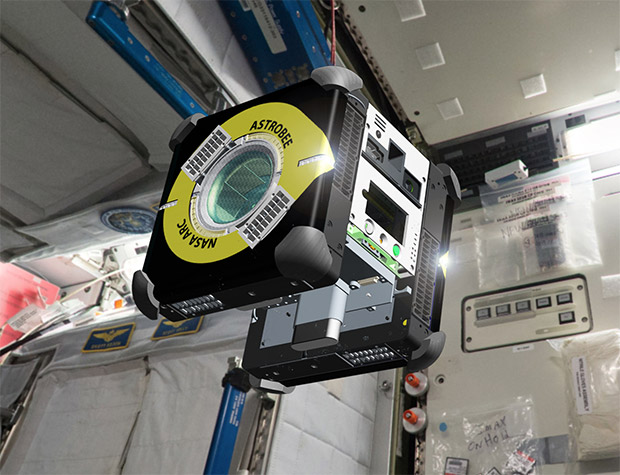
Le temps est maintenant venu pour une nouvelle génération de robots qui seront en mesure de fournir une assistance directe aux personnes à bord de l'ISS. Un tel robot est
Astrobee . Il peut participer à des tâches de routine des astronautes, notamment analyser la qualité de l'air, déterminer les niveaux de bruit et relayer les sons d'une station via un microphone et une caméra. De plus, le robot est équipé d'un scanner RFID, il peut utiliser certains outils, travailler avec eux à l'aide d'un petit manipulateur.
À l'automne, la NASA a montré les capacités de son robot dans l'un des
centres de recherche de la
NASA . Il n'a pas l'air trop impressionnant pour ses capacités. En fait, le robot est un cube d'une longueur de face de 32 centimètres. Le corps est en matière élastique. À l'intérieur se trouve un système réactif miniature qui permet au robot de se déplacer. De plus, un grand nombre de capteurs, de systèmes de contrôle, un écran tactile et plusieurs connecteurs gratuits supplémentaires pour ajouter divers matériels, y compris le bras manipulateur susmentionné, sont placés dans le boîtier.
Afin de tester les capacités du système réactif du robot, Astrobee a été placé sur un quai ressemblant à un traîneau. Ces traîneaux, à leur tour, sont situés sur l'une des faces d'un cube de granit très lisse. À l'aide d'un jet comprimé de dioxyde de carbone comprimé, le système glisse sans effort sur la surface. Grâce à cela, les développeurs peuvent tester les systèmes de navigation et réactifs, en ajustant divers éléments si nécessaire. Dans l'espace, le robot planera en gravité zéro sans traîneau, se déplaçant en raison de la propulsion par jet.
Les développeurs de la NASA affirment qu'Astrobee n'est pas la prochaine génération de
robots SPHERE . En fait, il s'agit d'une toute nouvelle plate-forme, assemblée à partir de zéro et conçue pour un fonctionnement autonome sur l'ISS. L'un des ajouts les plus notables est le système de propulsion à réaction. Il "démarre" à partir du courant électrique, et le robot peut être chargé dans sa station d'accueil. Les robots SPHERE, par exemple, savaient également comment se déplacer avec un jet, mais ils dépendaient de la charge de leurs batteries. Comme mentionné ci-dessus, lorsque des éléments supplémentaires sont ajoutés à la conception du robot, il devient plus fonctionnel. Les modules peuvent être remplacés par d'autres, remplaçant une fonction par une autre si nécessaire.
La différence entre le nouveau robot et ses prédécesseurs peut être appelée le fait que SPHERES était complètement dépendant en mouvement de la "charge" disponible de dioxyde de carbone. On croyait qu'ils pouvaient travailler non seulement à l'intérieur de la gare, mais aussi à l'extérieur. Astrobee en ce sens est très différent de ses «collègues». Il ne peut se déplacer en gravité nulle que s'il se trouve dans l'atmosphère. Le robot n'a pas de charge de dioxyde de carbone, donc son système réactif utilise l'air de la station. Autrement dit, il ne peut pas sortir de l'ISS.
Le système de contrôle informatique du robot capture et projette de l'air dans la direction opposée à l'itinéraire prévu. L'astrobée peut se déplacer dans n'importe quelle direction.
 La photographie montre l'un des modules de propulsion à réaction d'Astrobee.
La photographie montre l'un des modules de propulsion à réaction d'Astrobee.Derrière le mur protecteur de l'une des faces du cube se trouve un ventilateur qui aspire l'air. Il existe d'autres éléments similaires. Leur mouvement est conçu pour minimiser les forces gyroscopiques. Ce système
fonctionne en permanence , créant une poche d'air comprimé à l'intérieur du robot. L'air, si nécessaire, le mouvement du système est éjecté des buses spéciales. Ils sont situés sur toutes les faces de l'Astrobee. Si les buses sont fermées, le robot ne bouge pas. L'ouverture de la buse signifie la libération d'air comprimé et le mouvement dans la direction opposée.
Au total, les développeurs ont fourni 12 buses, qui sont placées dans une commande spéciale. Si vous n'utilisez qu'une seule buse par unité de temps, le cube en gravité zéro se déplacera de manière aléatoire. La gérer sera très difficile. Mais si vous travaillez immédiatement avec une paire de buses, le cube se déplacera de manière équilibrée.
Il est clair que la présence d'un système qui se déplace avec un jet d'air dans un espace d'air clos nécessite le développement de mesures de sécurité particulières. Si nécessaire, n'importe lequel des astronautes peut ramasser le cube et le déplacer dans un endroit sûr. De plus, le corps du robot est recouvert d'un matériau souple, ce qui minimise les dommages possibles de l'impact du robot sur tout élément fragile (écran d'ordinateur portable, etc.).
Quant aux hublots de la gare, il n'y a pas lieu de craindre pour eux. Ils se composent de quatre couches de verre. Deux couches sont des verres durables qui sont couverts par deux autres couches d'un autre type de verre. Maintenant, la NASA doit prouver qu'en aucun cas le robot ne pourra traverser l'une des couches.
De plus, les développeurs lors de la création d'Astrobee ont assuré sa totale sécurité. En d'autres termes, si le logiciel système est «fou», l'ensemble du système dans son ensemble ne devrait pas causer de dommages critiques à la station. Par exemple, un bug dans le logiciel peut faire accélérer le robot autant que possible et passer environ 20 mètres dans ce mode (distance maximale en ligne droite jusqu'à l'ISS). Dans ce cas, vous devez être sûr que lorsque vous frappez un élément de la station (la même fenêtre), il ne causera pas de dégâts critiques.
Entre les éléments individuels du système de propulsion à réaction du robot, il existe un grand nombre de capteurs et d'autres équipements dont le robot a besoin pour un fonctionnement autonome. Il peut notamment s'occuper de la circulation des marchandises. Plusieurs faces du robot sont conçues pour fonctionner avec des charges. En raison de la présence d'un système de capture d'objets, le robot peut le transporter d'un bout à l'autre de la station.
Le système informatique du robot se compose de trois niveaux: faible, moyen et élevé. Les niveaux moyen et élevé sont presque identiques, sauf que le niveau intermédiaire est basé sur Linux et est responsable de la plupart des fonctions du robot. Mais le niveau supérieur fonctionne sur la base d'Android et est chargé de travailler avec les marchandises et de les transférer d'un point à un autre. Ce niveau, selon les développeurs, n'est pas trop compliqué, vous pouvez donc écrire des applications pour Android, élargissant ainsi les fonctionnalités du système.
Quant aux capteurs, l'Astrobee dispose d'une caméra de navigation principale avec un champ de vision de 116 °. De plus, les développeurs ont prévu la présence d'une caméra HD avec autofocus, qui est capable de transmettre des informations de l'ISS à la Terre en temps réel. La caméra CamBoard Pico Flexx permet à l'appareil de détecter les obstacles à une distance de 4 mètres. Et un autre détecteur optique détermine la vitesse de l'appareil. Si la vitesse est trop élevée, un certain nombre de moteurs sont arrêtés pour la réduire.
L'un des avantages d'Astrobee est que le robot est capable de se déplacer de manière autonome autour de l'ISS (partout sauf dans le segment russe). C'est une réalisation importante pour les ingénieurs et les scientifiques, car à l'intérieur de l'ISS, il y a un espace segmenté, et y naviguer pour un robot n'est pas si simple. Cependant, il est organisé de manière très rationnelle, de sorte que le robot n'a pas besoin de trop «forcer» pour naviguer dans les différents compartiments. Dans la mémoire du robot, il y a une carte principale, de sorte que par une image de l'environnement, le robot puisse comprendre où il se trouve.
Mais interagir avec les gens pendant le mouvement est une tâche plus difficile. Les gens bougent de façon plus ou moins imprévisible et le robot ne doit pas entrer en collision avec eux en train de bouger. Dans le processus de travail sur Astrobee, ce problème a également été résolu. Soit dit en passant, le mode autonome du robot peut être désactivé et contrôlé à distance.
Une station d'accueil a été conçue pour permettre au robot de charger les batteries de l'appareil et de prendre les données de télémétrie.
Comme mentionné ci-dessus, pour effectuer un certain nombre d'opérations pour le robot, un manipulateur a été créé, il a été imprimé sur une imprimante 3D. La plupart du temps, le manipulateur est dans un état plié, mais si nécessaire, il peut se décomposer. À l'aide de la caméra, le robot reconnaît les objets accessibles qu'il peut déplacer. Également avec l'aide du manipulateur, Astrobee est capable de se déplacer dans l'espace de la station. Dans ce cas, vous pouvez économiser la batterie. Si vous utilisez uniquement le manipulateur et désactivez le système réactif, la consommation d'énergie est réduite de 80%.
La "griffe" à l'extrémité du manipulateur est assez fiable - si le robot s'est fixé avec son aide, mais il ne pourra pas se casser. Mais néanmoins, si nécessaire, l'astronaute peut retirer le robot, la force de compression est spécialement fournie à un niveau tel qu'une personne peut facilement prendre même un robot fixe en cas de problème.
Alors pourquoi est-ce nécessaire?
La tâche principale du robot est d'aider les astronautes à effectuer un certain nombre de tâches de routine. Que le robot fonctionne hors ligne ou soit contrôlé à distance, il devrait pouvoir remplacer une personne. Par exemple, installez un caméscope, observez le comportement de divers éléments à l'intérieur de la station, surveillez le fonctionnement de la station et surveillez la qualité de l'air. En particulier, il est extrêmement important de déterminer le niveau de concentration de dioxyde de carbone. Cette analyse est souvent effectuée, mais les astronautes n'aiment vraiment pas cette procédure monotone. Mais le robot peut remplacer la personne en cela et analyser l'air aussi souvent que nécessaire.
 Rendu de l'apparence du prototype final du robot
Rendu de l'apparence du prototype final du robotCette année, le robot ne fonctionnera pas sur l'ISS. La NASA prétend lancer sa station au cours de l'exercice 2018. Trois de ces robots seront envoyés simultanément. Deux réaliseront les tâches principales et la troisième servira de complément. Si l'un des robots envoyés tombe en panne, il peut être remplacé.
Avant l'arrivée de ces robots sur l'ISS, leurs prédécesseurs, SPHERES, seront déjà supprimés. Dans le passé, les appareils se sont bien montrés et les données qu'ils ont collectées ont grandement aidé les scientifiques dans le développement d'un robot de nouvelle génération. Un robot peut soulager considérablement les membres de l'équipe ISS, et trois de ces robots supprimeront complètement certaines des tâches mineures, mais chronophages, des astronautes.