 Le champ magnétique fait tourner les vis individuelles qui contrôlent le mouvement des bras, des jambes et de la tête du jouet à travers les cordes
Le champ magnétique fait tourner les vis individuelles qui contrôlent le mouvement des bras, des jambes et de la tête du jouet à travers les cordesIl existe deux façons de contrôler à distance le robot. Soit vous essayez de l'équiper d'un système de propulsion autonome et d'un système de navigation (très difficile), soit vous faites un très petit robot qui se déplace dans un champ magnétique. Le robot est contrôlé par de grands aimants externes. La télécommande de tels appareils est particulièrement demandée en médecine, d'autant plus que les appareils d'une taille de
quelques micromètres sont bien soumis à un contrôle magnétique. Des expériences de
placement à distance de
cathéter dans le cœur et de contrôle d'une
sonde vidéo dans le tractus gastro-intestinal sont déjà terminées. L'énorme potentiel des micromachines pour délivrer des médicaments à des organes humains spécifiques.
Cependant, de nombreuses applications prometteuses du contrôle magnétique nécessitent le travail coordonné non pas d'un, mais de plusieurs microrobots simultanément. Jusqu'à présent, les scientifiques n'ont pu réaliser que le mouvement simultané de robots identiques dans un champ homogène, mais pas des participants arbitraires dans l'essaim. Oui, il y a eu un certain nombre d'expériences sur le contrôle individuel de robots à partir d'un essaim. Mais dans tous les cas, ces robots doivent différer les uns des autres par leurs propriétés magnétiques ou leur conception. C'est pourquoi le
travail scientifique des physiciens du laboratoire de recherche de Philips GmbH Innovative Technologies est très intéressant. Ils ont appris à tordre le champ magnétique dans des endroits arbitraires et ont mené avec succès des expériences pour serrer et desserrer des vis individuelles situées les unes à côté des autres.
À première vue, il n'est pas clair comment la torsion de vis arbitraires est associée au contrôle d'un essaim de robots dans le corps humain. Cependant, si vous y réfléchissez, ces tâches sont très proches. Après tout, contrôler le champ magnétique avec une telle précision vous permet de créer une traction magnétique dans des zones spécifiques du corps humain - exactement où se trouve le dispositif magnétique, qui doit être mis en mouvement.
Serrage de vis individuelles avec un champ magnétiquePrincipe de fonctionnement
L'illustration ci-dessous montre un applicateur de champ avec un diamètre d'alésage de 12 cm, composé de trois paires de bobines de cuivre montées le long de trois axes spatiaux et de noyaux cylindriques en fer pour renforcer le champ le long de l'axe z. La conception est quelque peu similaire en principe à un appareil d'imagerie à particules magnétiques (MPI), mais la tâche opposée est posée ici - non pas pour détecter l'emplacement des particules magnétiques avec une grande précision, mais pour contrôler ces objets avec la même haute précision.

Si un courant de même amplitude circule le long de deux bobines, alors un champ spatialement uniforme apparaît le long des axes, comme dans les
anneaux de Helmholtz . La combinaison de trois paires de bobines vous permet de générer des champs dynamiques uniformes d'orientation arbitraire. Si des courants de même amplitude circulent dans des directions opposées, une paire de bobines fonctionne comme une
bobine de Maxwell , formant un champ de gradient (dans l'illustration en haut à droite et dans l'illustration ci-dessous).
 Configuration de bobine idéale de Maxwell
Configuration de bobine idéale de MaxwellLors d'une expérience conceptuelle, les scientifiques ont prouvé qu'ils pouvaient serrer les vis situées littéralement à des endroits arbitraires à l'intérieur du générateur de champ.
L'illustration montre comment la direction du vecteur d'aimantation est calculée et le couple est généré. La physique vous permet de serrer / dévisser toutes les vis en même temps ou chaque vis individuellement.
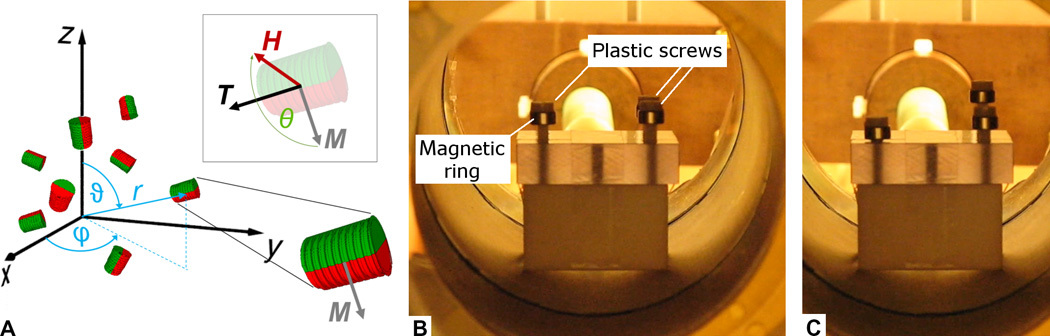
Les scientifiques pensent que le dispositif développé peut déjà être utilisé en médecine. Par exemple, pour serrer et desserrer les vis qui sont placées à l'intérieur des capsules ou des implants qui sont fermement fixés aux tissus environnants du corps humain. Si la capsule est verrouillée, elle ne tournera pas avec la vis. De plus, la force de fixation de la capsule peut être si élevée qu'elle vous permettra de visser des vis ou des vis directement dans les tissus du corps humain. Par exemple, dans l'os.
Peut-être que la torsion de l'appareil avec un champ magnétique peut être applicable pour le mouvement des microrobots dans les fluides corporels. Dans ce cas, les médecins recevront un contrôle sélectif indispensable d'un essaim de microrobots dans le corps humain.
De plus, des machines plus complexes dans le corps humain peuvent être contrôlées en tournant des vis de commande individuelles, comme le montre le KDPV en utilisant le jouet Lego comme exemple (illustration tirée d'un article scientifique). Il peut s'agir d'implants complexes à l'intérieur du corps. Peut-être qu'en orthopédie, la forme des implants sera ajustée sans avoir besoin d'utiliser des moteurs ou d'installer des piles à l'intérieur de l'appareil. Les scientifiques suggèrent l'utilisation pratique de la rotation à distance des vis dans les appareils d'allongement des membres, de contrôle des micropompes, de libération à distance des médicaments et d'introduction précise de grains radioactifs de type
103 Pd dans les tumeurs cancéreuses (radiothérapie de contact).
L'article scientifique a été
publié le 15 février 2017 dans la revue
Science Robotics (doi: 10.1126 / scirobotics.aal2845).