Il y a quelque temps, tombant sur Internet sur des articles et des vidéos sur les hélicoptères, je pensais que c'était difficile et inaccessible à tout le monde. Mais le désir de devenir un guide copter était grand, et après avoir étudié la masse de matériel sur ce sujet, il a conclu par lui-même ce qu'il fallait pour construire un quadricoptère, c'était un bâtiment à partir de zéro, et lui-même ne voulait pas acheter la version finale. Maintenant, je veux partager avec vous mon expérience dans la construction d'un quadricoptère sur MultiWii SE v2.5. Dans l'article, je vais essayer de décrire en détail tout le processus de construction d'un quadricoptère de zéro au premier vol à un débutant absolu dans ce sujet, ce qu'il était lui-même il y a quelque temps.
Un peu de théorie sur le vol en quadcopter
Nous assemblerons l'hélicoptère sur le cadre classique de la forme «X». Gérer un hélicoptère n'est pas aussi simple qu'il y paraît à première vue, il n'a ni avant ni arrière comme dans les voitures radiocommandées. Avec la commande "avant", le quadricoptère ne vole pas là où le pilote regarde, mais là où pointe le nez du quadricoptère (il y a une
flèche correspondante sur le contrôleur de vol), c'est un gros danger pour les débutants, car à partir du sol, il peut être difficile de déterminer où se trouve le nez de l'hélicoptère.Par conséquent, lors de la construction, vous devez le marquer d'une manière ou d'une autre, par exemple avec des rayons de couleur différente ou en plaçant des LED. Contrôlez l'hélicoptère, c'est-à-dire pour déterminer et définir son orientation dans l'espace, nous inclinerons, inclinerons et inclinerons + grimperons. Le vol de l'hélicoptère dans la direction nécessaire est obtenu en changeant ces trois angles. Par exemple, pour voler vers l'avant, l'hélicoptère doit plier le nez au sol (tangage).
Accélérateur - gaz, montée
Aileron - rouleau, aileron (rouleau)
Ascenseur - ascenseur, emplacement (emplacement)
Gouvernail - gouvernail, lacet (lacet)
Moteurs:
LFW - avant gauche, rotation dans le sens horaire
RFC - avant droit, rotation antihoraire
LBC - arrière gauche, rotation antihoraire
RBW - arrière droit, rotation dans le sens des aiguilles d'une montre

Composants nécessaires:
Contrôleur de vol CRIUS MultiWii SE v2.5
Programmeur FTDI
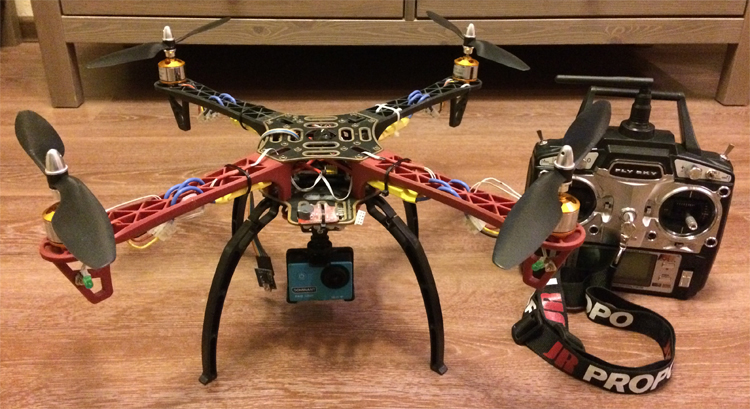
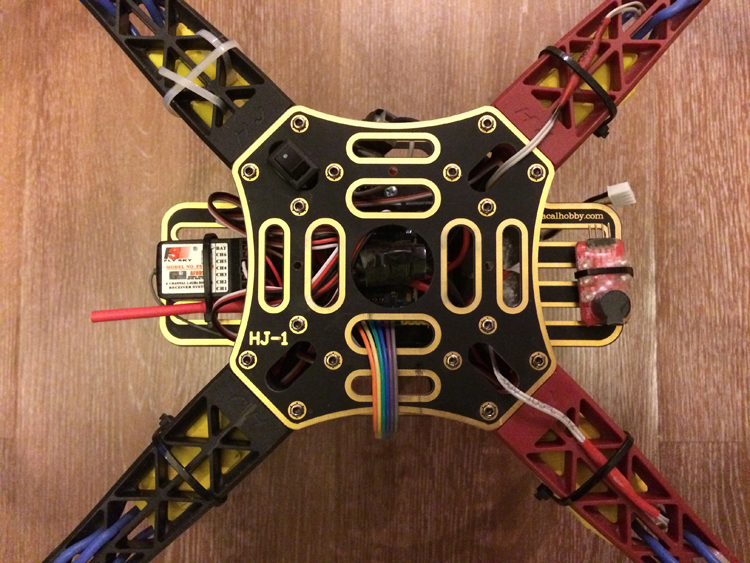
Frame HJ450
Moteurs 2212-1000KV - 4pcs.
Contrôleurs de vitesse ESC 30A - 4pcs.
Batterie 11.1V 2200Mah 3S 40C Li-Po ( exemple )
Chargeur de batterie B3 AC 2S-3S 7.4V 11.1V Equilibreur de batterie Li-Po
Fil de batterie T-Plug
Pinces en plastique
FlySky FS-T6 2.4G 6CH équipement de contrôle complet avec récepteur
Hélices 1045 (10x4,5) CW / CCW - 2 pcs. rotation dans le sens horaire + 2pcs. rotation dans le sens antihoraire; prendre plus d'hélices, car tout en apprenant à contrôler un hélicoptère, quand ils tombent, ils se brisent une fois
En option:
Jambes d'atterrissage
Testeur de batterie Testeur d'indicateur de tension de batterie Li-Po Basse tension (signalera lorsque la batterie est déchargée)
Schéma d'assemblage:

Avant l'assemblage, il est nécessaire de calibrer les contrôleurs ESC, le processus est le suivant: nous connectons le moteur au contrôleur, connectons le régulateur au canal de gaz sur le récepteur (CH3) et à la batterie, soulevons le bâton de gaz sur l'équipement de commande jusqu'à l'arrêt, allumez l'appu - un son caractéristique est fait, abaissons le bâton de gaz vers le bas tout le long - un son caractéristique est émis, puis nous testons - levez / abaissez le bâton de gaz - vérifiez le fonctionnement, éteignez l'appu - le régulateur est calibré; en utilisant cette analogie, calibrez tous les ESC (
vidéo appropriée pour plus de clarté).
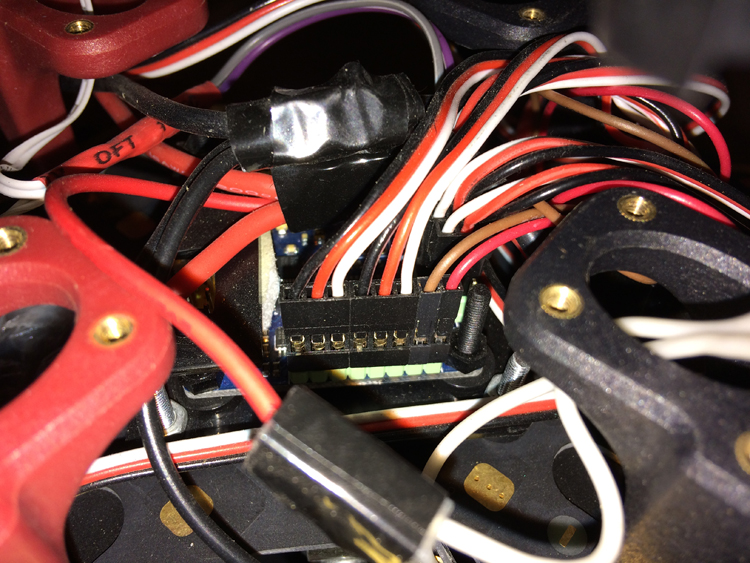
Nous assemblons le cadre, installons le MultiWii, montons les moteurs, connectons les contrôleurs ESC: aux moteurs, au MultiWii et à l'accumulateur (nous connectons les «plus» et les «moins» des commandes et les connectons respectivement aux batteries «+» et «-»). Attention, pour changer le sens de rotation du moteur, il suffit d'échanger deux fils parmi les trois venant du moteur vers l'ESC. Il est souhaitable d'installer MultiWii sur le châssis via la plateforme (je l'ai fait
moi -
même , mais vous pouvez l'acheter) afin d'éviter les courts-circuits sur le boîtier et pour la précision des données; J'ai également fait une petite «ferme collective» pour le baromètre - je l'ai fermée avec du caoutchouc mousse pour réduire l'erreur dans les données.
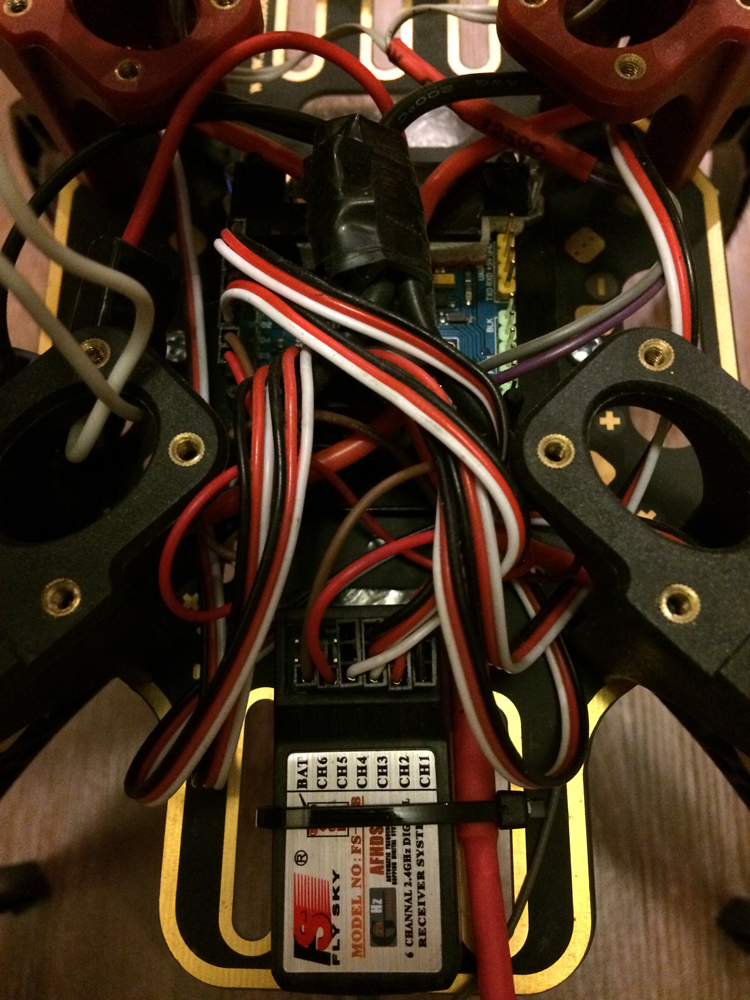
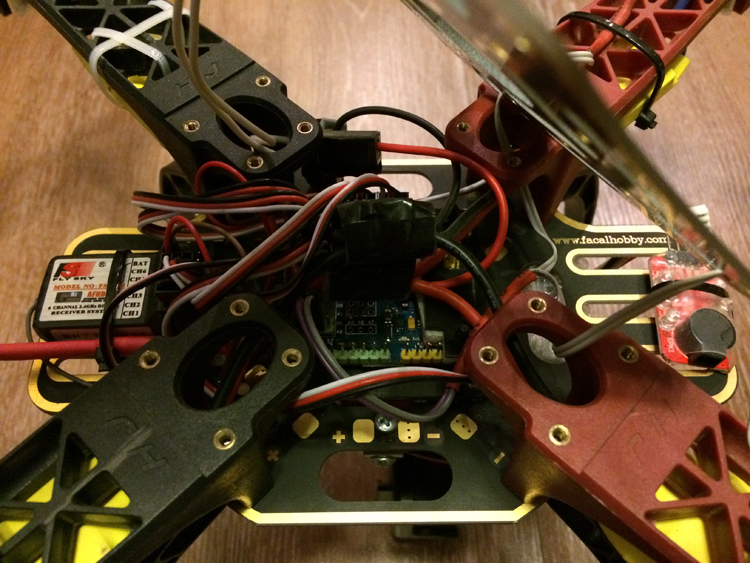
Des canaux supplémentaires CH5 et CH6 peuvent être utilisés pour activer les fonctions: maintenir la hauteur, revenir à la maison, contrôler le cardan de la caméra, etc., vous pouvez en lire plus dans cet
article . Mes diodes sont connectées à "+" et "-" sur A2. Le programmateur FTDI est connecté au connecteur FTDI correspondant sur la carte.






Après avoir tout assemblé et connecté, vous devez remplir le firmware dans MultiWii, vous devez le faire via le programme Arduino IDE (vous pouvez télécharger la version actuelle
ici ). Nous connectons MultiWii au PC via le programmateur FTDI, démarrons l'Arduino IDE, sélectionnons le port COM auquel la carte est connectée dans le menu, sélectionnons également le type de carte dans le menu, ouvrons le firmware (lien à la fin de l'article), ouvrons le fichier MultiWii.ino, vous verrez ci-dessus plusieurs onglets, nous ne nous intéresserons qu'à config.h, nous devons configurer le firmware - en fonction des paramètres nécessaires, vous devez décommenter (supprimer «//») l'une des lignes de la section souhaitée (lien vers le fichier config.h avec mes paramètres à la fin article), après la configuration, remplissez le firmware dans MultiWii.
Maintenant, nous devons continuer à configurer l'hélicoptère via l'interface graphique, pour cela, nous allons utiliser le programme MultiWiiConf (lien à la fin de l'article). Nous connectons MultiWii au PC via le programmateur FTDI, lançons MultiWiiConf, sélectionnons le port COM auquel la carte est connectée dans le menu, appuyez sur le bouton START (les valeurs doivent apparaître sur le graphique), avant de modifier les paramètres - appuyez sur READ, pour enregistrer les paramètres - appuyez sur WRITE. Après avoir sélectionné le port et appuyé sur START (vous voyez que le graphique a pris vie, les données arrivent), vous devez calibrer les capteurs: pour calibrer l'accéléromètre, réglez l'hélice parallèlement à l'horizon et appuyez sur le bouton CALIB_ACC, l'interface graphique se fige pendant un certain temps, puis assurez-vous que les axes ROLL et PITCH sont parallèles ; pour étalonner le magnétomètre (boussole) - appuyez sur le bouton CALIB_MAG et tournez l'hélicoptère dans tous les axes ou placez l'alternateur sur les côtes pendant 30 secondes. De plus, après avoir correctement connecté le programme de configuration à votre hélicoptère, en haut à droite, vous verrez des barres bleues montrant les canaux de votre télécommande, déplacez les bâtons pour vous assurer que tout fonctionne correctement. Le manche en position min doit afficher une valeur de 1000, au centre de 1500 et en max 2000; si ce n'est pas le cas, découpez la télécommande selon les instructions qui la concernent (lien en fin d'article). N'oubliez pas que les bandes doivent se déplacer en fonction des mouvements des bâtons, c'est-à-dire si vous soulevez la manette des gaz vers le haut, alors la bande devrait monter (de même pour les autres canaux), si ce n'est pas le cas, inversez les canaux de votre télécommande. Dans l'interface graphique également, vous pouvez définir les fonctions à ajouter. canaux, tels que la rétention en hauteur (BARO). La fonction d'alignement horizontal (LEVEL) doit toujours être activée! Voici une
vidéo appropriée pour illustrer le fonctionnement du programme MultiWiiConf.
Quelques digressions sur le sujet
Ne vous attendez pas à ce que la fonction maintienne la hauteur (BARO) du vol stationnaire en un point, car un baromètre est utilisé pour cela - l'hélicoptère va certainement essayer de garder l'altitude à laquelle vous avez activé la fonction, mais il nagera dans un rayon de ± quelques mètres, juste pour la précision des données du baromètre et pour le protéger des influences extérieures, j'ai fait une «ferme collective» avec du caoutchouc mousse. Rappelez-vous que la rétention d'altitude doit être activée sur le gaz stationnaire, c'est-à-dire puis lorsque vous utilisez le bâton à gaz pour vous assurer que l'hélicoptère ± est maintenu à la même hauteur et qu'il n'est pas conseillé de toucher le gaz après avoir activé la fonction. Pour un vol stationnaire plus précis à un moment donné, il est préférable d'utiliser le module GPS en option.
La fonction de maintien de cap (MAG) est très capricieuse et son utilisation pour moi s'est terminée de manière déplorable.Après activation et décollage, l'hélicoptère a commencé à tourner comme une toupie et s'est rapidement envolé de moi, les tentatives pour déterminer le nez de l'hélicoptère et le retourner au cours ont échoué, je n'avais pas le choix comment jeter du gaz et courir vers un point tombant du ciel. Voici une courte
vidéo et
photo après l'automne. Peut-être que ce comportement a été causé par une boussole mal calibrée ou une interférence magnétique, ou autre chose; en général, lisez les informations sur Internet avant utilisation et faites attention.
Pour l'avenir, il peut être utile pour vous de ne pas emporter avec vous un ordinateur portable avec le programme MultiWiiConf sur les vols - vous pouvez connecter le module Bluetooth HC-05 au contrôleur MultiWii (se connecte au connecteur UART) et via les applications Android (
Configuration MultiWii et
Station au sol EZ-GUI ) via Bluetooth se connecte à l'hélicoptère, et effectuez les réglages nécessaires, similaires à ceux de MultiWiiConf.
La procédure de démarrage des moteurs est la suivante: allumez l'hélicoptère (grincement), allumez l'application, prenez le bâton de gaz de la position inférieure à droite - les moteurs démarrent (alimentation) et tournent au ralenti, maintenant pour décoller en douceur, ajoutez du gaz; pour arrêter les moteurs, prenez la manette des gaz de la position inférieure vers la gauche - les moteurs se sont arrêtés, coupez l'alimentation de l'hélicoptère, éteignez l'application.
C'est tout, j'espère que mon article vous sera utile, mais maintenant vous pouvez installer des hélices et avancer, dans notre cas, vers le haut, bonne chance et moins de chutes.
Une courte vidéo de mes vols
Liens de téléchargement:
Archive - firmware MultiWii + programme MultiWiiConf
Fichier Config.h avec mes paramètres
Manuel pour FlySky FS-T6
PS - continué ici:
"Installation de FPV et de télémétrie sur un quadricoptère"