 L'objectif principal du module est de contrôler des moteurs synchrones sans balais (BLDC, BLAC, PMSM ...) avec une forme de tension trapézoïdale ou sinusoïdale , avec des capteurs de vitesse-position ou sans capteurs . De plus, le module a de petites dimensions, une gamme assez large de tensions d'alimentation, une variété de canaux de débogage, des communications filaires et sans fil.La puissance des moteurs contrôlés par le module peut être de quelques centaines de watts et la tension jusqu'à 30V. Ce sont des moteurs de divers mécanismes et dispositifs, tels que: imprimantes 3D, portes automatiques, volets automatiques, pompes autonomes, ventilateurs, serrures, outils électriques, stabilisateurs, moteurs et servomoteurs de modèles RC, robots, etc.Mais cela ne se limite pas à l'utilisation du module. Il peut être utilisé avec des ajouts mineurs pour contrôler les solénoïdes, les moteurs pas à pas, pour contrôler l'éclairage, comme un chargeur puissant, comme un régulateur de tension, comme une puissante source de signaux audio, comme un interrupteur à haut ampère avec un compteur de courant et simplement comme une plate-forme de débogage.En un mot, un tel module chez un ingénieur peut être très utile.Toutes ces propriétés du module sont obtenues grâce au circuit demi-pont triphasé classique avec des capteurs de courant et de tension et un puissant microcontrôleur.
L'objectif principal du module est de contrôler des moteurs synchrones sans balais (BLDC, BLAC, PMSM ...) avec une forme de tension trapézoïdale ou sinusoïdale , avec des capteurs de vitesse-position ou sans capteurs . De plus, le module a de petites dimensions, une gamme assez large de tensions d'alimentation, une variété de canaux de débogage, des communications filaires et sans fil.La puissance des moteurs contrôlés par le module peut être de quelques centaines de watts et la tension jusqu'à 30V. Ce sont des moteurs de divers mécanismes et dispositifs, tels que: imprimantes 3D, portes automatiques, volets automatiques, pompes autonomes, ventilateurs, serrures, outils électriques, stabilisateurs, moteurs et servomoteurs de modèles RC, robots, etc.Mais cela ne se limite pas à l'utilisation du module. Il peut être utilisé avec des ajouts mineurs pour contrôler les solénoïdes, les moteurs pas à pas, pour contrôler l'éclairage, comme un chargeur puissant, comme un régulateur de tension, comme une puissante source de signaux audio, comme un interrupteur à haut ampère avec un compteur de courant et simplement comme une plate-forme de débogage.En un mot, un tel module chez un ingénieur peut être très utile.Toutes ces propriétés du module sont obtenues grâce au circuit demi-pont triphasé classique avec des capteurs de courant et de tension et un puissant microcontrôleur.
(Cliquer pour agrandir)Afin d'accélérer le processus de développement du circuit de l'unité de puissance, l'un des projets typiques proposés par TI a été pris comme base.J'ai choisi la conception de la carte TIDA-00901 .(Cliquez pour agrandir) Lacarte a de bonnes caractéristiques: courant jusqu'à 20 A, puissance du moteur jusqu'à 200 W, tension nominale 12 V. Conçu pour fonctionner dans une voiture.En tant que pilote de touches d'alimentation, la puce DRV8305 est utilisée . Certaines recherches ont permis de conclure qu'il s'agit de l'une des meilleures puces de pilotes pour de telles applications.Un document de développement très utile est la conception de référence d'entraînement de moteur BLDC 12 V 200 W (20 A) pour automobile .La carte a une forme ronde spécifique, le contrôleur C2000 LaunchPad est utilisé comme élément de contrôle. Malheureusement, le logiciel n'est pas complètement ouvert en ce qui concerne les bibliothèques de contrôle moteur. Le C2000 LaunchPad est basé sur la famille de processeurs DSP F2802x Piccolo. Cette famille de processeurs est spécialisée dans le développement de convertisseurs d'énergie simples et ne diffère pas par une grande universalité et des ressources.Architecture du module.
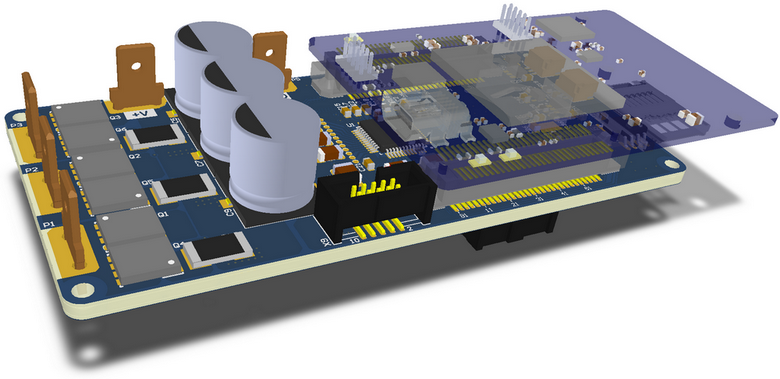
Dans ce projet, il a été décidé d'exécuter le module sous la forme d'une structure composite de 2 cartes. La carte principale contient un pilote d'alimentation, un sous-système d'alimentation et certaines fonctions périphériques. La carte processeur est installée sur la carte principale. La carte deprojet K66BLEZ1 (un autre article sur ce projet - 1 , 2 , 3 , 4 ) avec un microcontrôleur de la famille NXP Kinetis basé sur le cœur ARM Cortex-M4 a été sélectionnée comme processeur . ( 180 MHz, 2 Mo de mémoire Flash, 256 Ko de RAM + carte micro SD, horloge en temps réel auto-alimentée, périphérique USB / hôte haute vitesse, puce Bluetooth LE 4 / ZigBee séparée )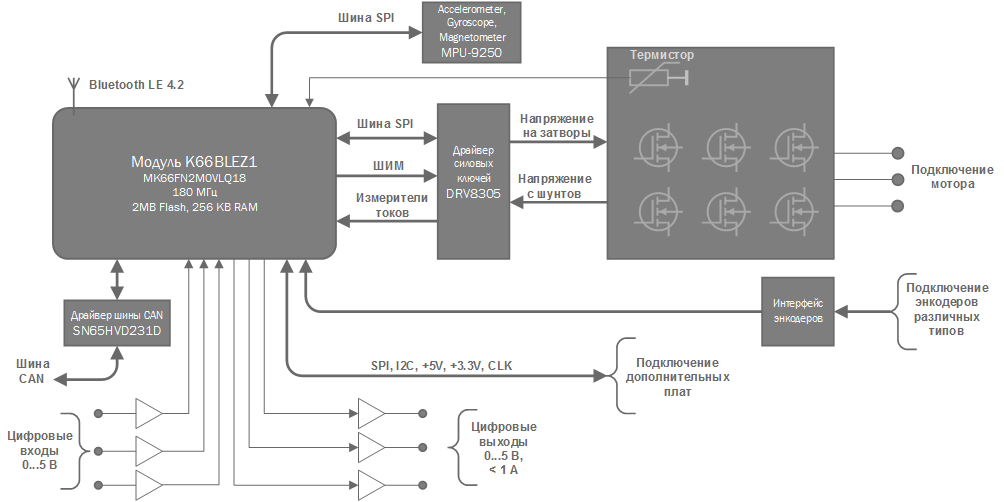
(Cliquez pour agrandir)8.5 30 . — , .
-40 . .
200 . 0.001 . DRV8305 ,
300 0.1 .
CAN .
MPU-9250 , .
D-DC 5
3.5 . 150 , X4. X4 , RGB
WS2812B .
WS2812B, PPM, PCM, PWM . PPM PCM .
Calcul de la fréquence de commutation maximale et justification de la sélection des transistors de puissance
Nous revérifions le tableau de comparaison des transistors proposé dans le document de TI . Tous les paramètres sont réécrits à partir des fiches techniques.
(Cliquez pour agrandir)Ici, comme les spécialistes TI, j'ai choisi CSD1854Q5B. En termes de courant maximum, c'est le meilleur choix. Et la fréquence de commutation de 122 KHz va bien au-delà de la limite raisonnable réalisable avec le contrôle de la famille Kinetis.Calcul de l'ondulation de courant maximale et justification de la sélection des condensateurs de filtrage
Les ondulations actuelles affectent directement le chauffage et la durée de vie des condensateurs, en particulier électrolytiques. Par conséquent, il est nécessaire de sélectionner les condensateurs par type et calibre, en tenant compte de la durée de vie estimée et des courants maximaux.En utilisant cette formule, vous devez vérifier si le module est capable de contrôler ce moteur sans dépasser les courants de condensateur maximum.Comme les experts TI l'ont calculé, avec les condensateurs indiqués sur le schéma, un module à une fréquence PWM de 40 KHz peut pendant longtemps alimenter un moteur verrouillé avec un courant à travers les enroulements de plus de 80 A.Schéma de la carte principale du module
(Cliquer pour agrandir)
(Cliquer pour agrandir)Emplacement du connecteur
Vue de la carte principale d'en haut: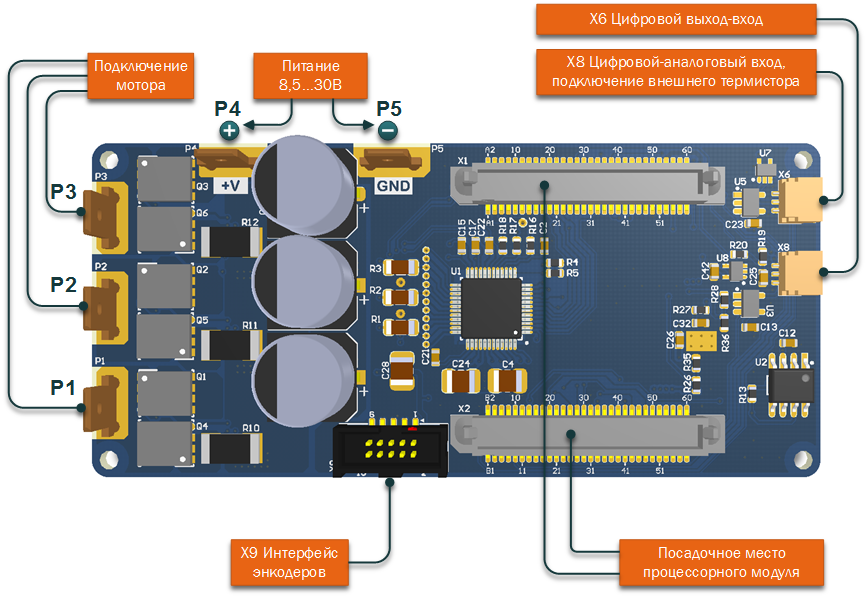
(Cliquez pour agrandir)Vue de la carte principale d'en bas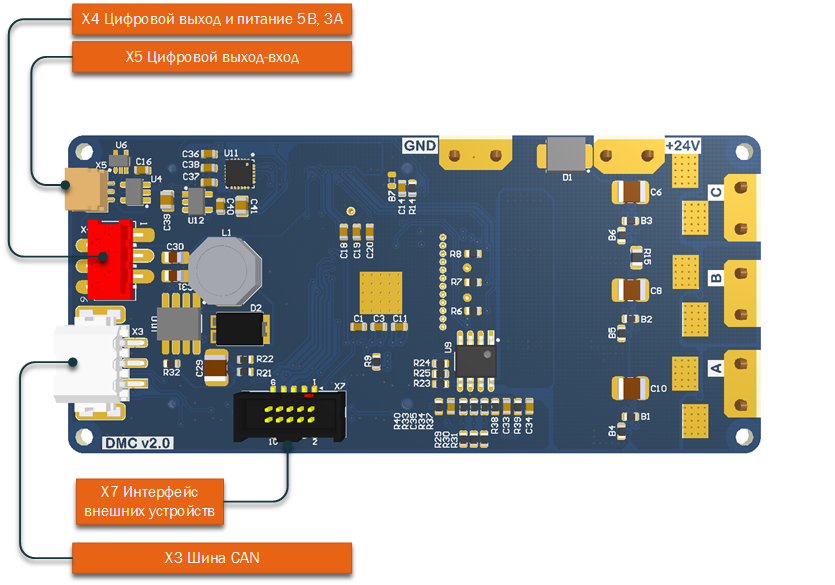
(Cliquez pour agrandir)Les dimensions
(Cliquer pour agrandir)Dépôt de projets
Tous les matériaux liés au projet sont stockés ici .Le circuit et la carte de circuit imprimé sont développés dans Altium Designer 17.0.6.Dans le référentiel, vous pouvez trouver le modèle d' assemblage 3D au format STEP.Il existe également un fichier de calcul pour le convertisseur DC-DC sur l'A8586 au format Mathcad.La partie programme du projet sera examinée dans le prochain article.