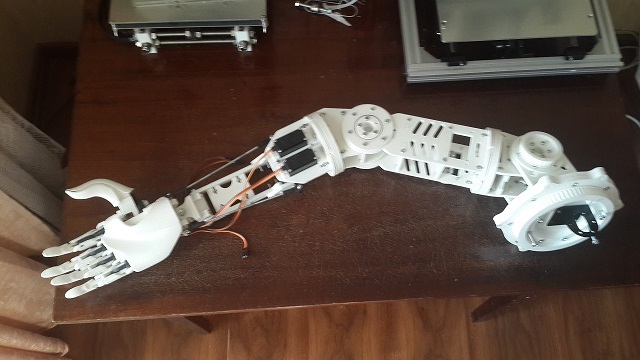
Aujourd'hui, nous voulons parler de l'appareil du robot manipulateur Oscar promo. Bien qu'au départ, aucune exigence industrielle stricte n'ait été présentée au manipulateur, notre objectif était néanmoins de proposer une solution pratique et esthétique, tout en étant peu coûteuse et relativement simple à réaliser chez soi.
La longueur du manipulateur de l'épaule au bout des doigts est de 0,6 mètre, poids - 2,25 kg. Matériaux de fabrication - PLA. Le manipulateur peut être divisé conditionnellement en 3 composants:
- Brosse bionique
- Poignet (2 degrés de liberté)
- Articulations du coude et de l'épaule (5 degrés de liberté)
Cela est dû au fait que chacun des composants a sa propre solution technique.
Brosse bionique
Pour un démarrage rapide et facile, il a été décidé de prendre le projet open source Hackberry comme base. Le design de la brosse a été légèrement modifié pour s'adapter à vos besoins.
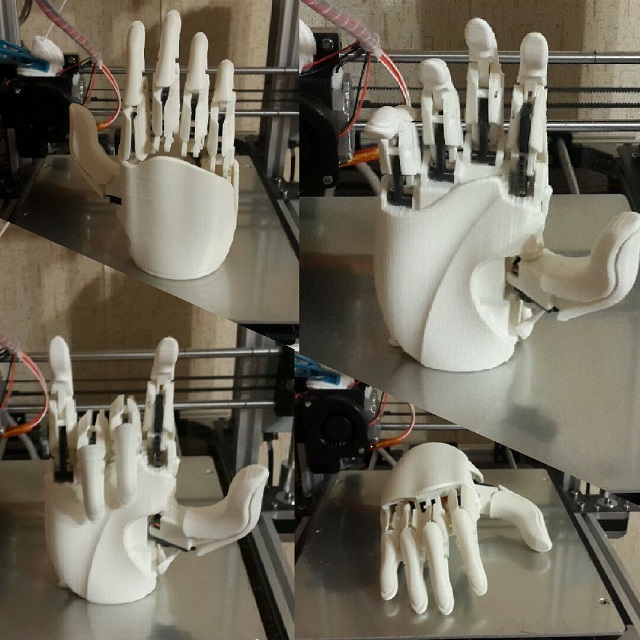
Les commandes de contrôle des doigts sont situées dans la brosse elle-même. Il y en a trois. Un sur le pouce, un sur l'index et un sur le reste.
Avec l'aide d'une telle prise intelligente, le robot peut prendre un objet volumineux, par exemple, une bouteille d'eau minérale, ainsi que serrer la main d'une personne ou saisir un objet plus petit / mince, en le tenant entre le pouce et l'index.
Poignet
Le poignet a un entraînement différentiel et est contrôlé par une paire de tiges. Une extrémité de la tige est fixée à la base de la brosse, l'autre au servo-levier. Ainsi, 2 degrés de liberté sont obtenus.
Pour une plus grande esthétique, des modèles maîtres pour le corps de l'avant-bras ont été conçus et imprimés sur une imprimante 3D.

Et le boîtier a été réalisé par moulage sous vide. Le résultat est une telle main anthropomorphe.

À mon avis, c'est joli.
Articulations du coude et de l'épaule
Ici, à mon avis, le plaisir commence. Afin d'obtenir un comportement acceptable de ces articulations, contrairement au stade très lisse de développement d'un poignet avec un poignet, nous avons dû bricoler beaucoup avec la mécanique et le contrôle.
Gestion, il a été décidé de mettre en œuvre des servos sur la base du DPT 37Dx70L habituel, que nous avions dans la bonne quantité des projets précédents.
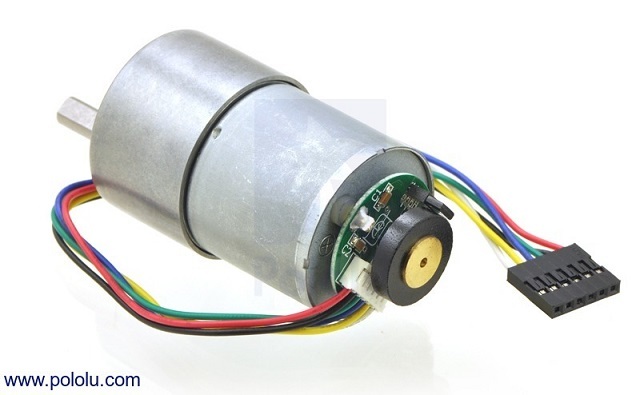
En général, nous avons aimé les données du DPT, mais elles ont un inconvénient, à savoir le niveau de bruit. À l'avenir, nous prévoyons de les remplacer par des identiques, mais moins bruyants.

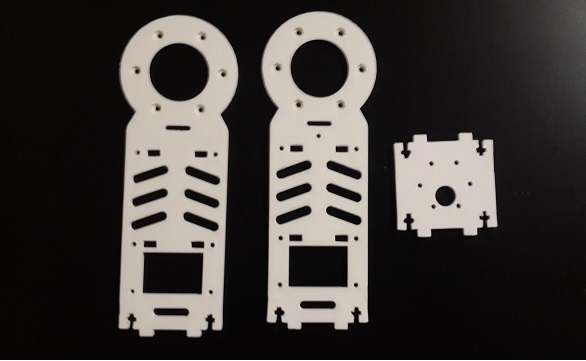
Les roulements et les profils imprimés sur une imprimante 3D constituent la base de la construction des roulements des articulations. Le roulement se compose de quatre demi-rainures tirées ensemble par paires et de billes métalliques de 4, 6 et 8 millimètres.
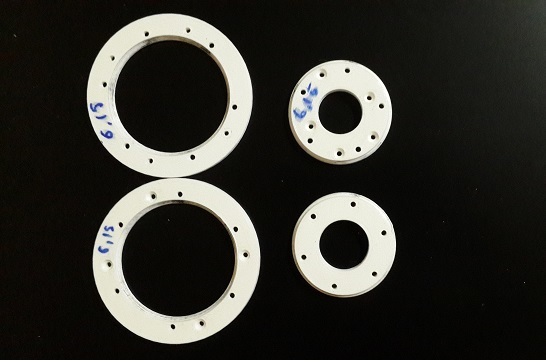
Les profils ont des rainures pour l'interconnexion; des raidisseurs supplémentaires sont également utilisés. Tout ce bonheur est réuni par des boulons.
Initialement, à certains degrés, l'arbre du moteur était fixé au roulement au moyen d'un accouplement.
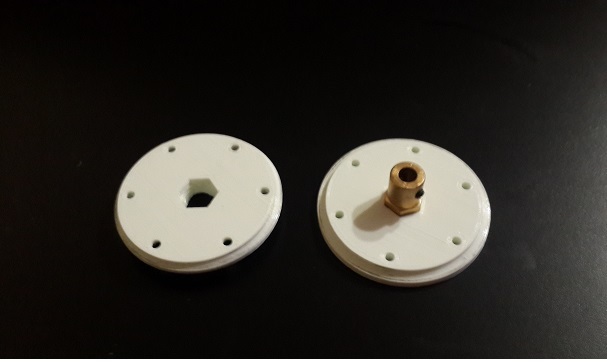
Mais faute d’entraînements avec les bonnes vitesses et les bons efforts, nous avons repensé la conception des entraînements par courroie.
Serva
Les exigences suivantes ont été imposées à la gestion du «serveur»:
- Contrôle de l'arbre de sortie
- Réglage de la vitesse
- Ajustement de l'effort (condition avec un astérisque)
Premièrement, nous avons recherché des projets similaires sur Internet - nous ne sommes pas les seuls à être aussi «intelligents». Sur la base d'
un des projets que nous avons aimé, nous étions très mécontents du résultat. Le positionnement de l'arbre d'entraînement était très médiocre.
En conséquence, nous n'avons été satisfaits que du développement de notre solution personnalisée. À cet égard, l'article
«Maintenir la position dans le servo variateur: régulation subordonnée vs mode pas à pas» a beaucoup aidé, dont un grand merci à l'auteur!
Le schéma général de gestion était le suivant (le schéma est repris de l'article ci-dessus):
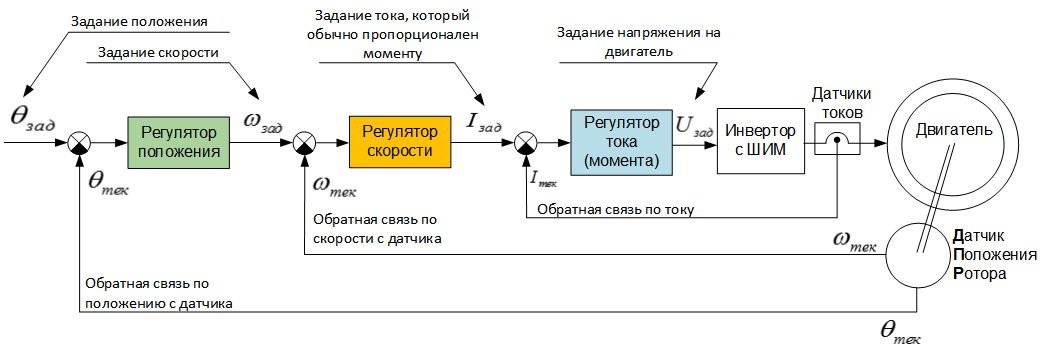
Dans notre circuit, l'encodeur magnétique as5045 est utilisé comme capteur de position et les lectures de courant sont prises à l'aide du capteur GY-712 5A.
Initialement, l'Arduino Mega a été utilisé pour contrôler les disques, et bien que le résultat ait été satisfaisant, nous avons finalement opté pour le STM32F4, plus fiable et basé sur des tubes.
Voici le résultat de l'entraînement:
Ayant obtenu un résultat acceptable en contrôlant l'arbre de sortie du «servo» sans charge, il a été placé dans le bras du manipulateur. Et «tout à coup», il s'est avéré que contrôler un lecteur et un manipulateur sont deux choses différentes. Le problème était que le manipulateur "saucisse" aux points cibles, il y avait un soi-disant "rebond de serge". Nous avons essayé différents coefficients des régulateurs, mais tout a été vain.
La cause de nos ennuis était la gravité notoire. En position suspendue (lorsque le bras est abaissé verticalement vers le bas), pour une régulation de 10 degrés dans l'articulation de l'épaule, un coefficient de régulateur est nécessaire et d'autres coefficients pour obtenir la même déviation en position horizontale. Parce que le système n'est pas trop dynamique, puis pour déterminer le niveau d'influence de la gravité et par la suite sa compensation, nous avons utilisé l'accéléromètre à trois axes habituel, qui a résolu notre problème. Cette décision ne prétend pas être une panacée - c'est juste notre chemin. Parmi les lecteurs de notre article, il y a peut-être des conducteurs électriques expérimentés qui peuvent conseiller quelque chose.
Voici un test vidéo de l'un des degrés de l'épaule (comme il s'est avéré, le degré le plus difficile en termes de gestion).
Et bien sûr, toute la vidéo du manipulateur:
En fin de compte
En général, nous sommes satisfaits de l'implémentation de la première version du manipulateur. L'erreur moyenne de tous les «servs» varie dans la plage de 0,2 à 1 degré (ne faites pas cette chirurgie avec ce manipulateur). Je n'aimais pas vraiment la prise en main - trop lourde (350 grammes). Très probablement, nous développerons notre propre. À l'avenir, nous voulons augmenter la précision de tous les degrés, refaire la mécanique du poignet - y mettre notre servo «personnalisé» et créer un système de sécurité.
Et ensuite?
Nous terminons maintenant le travail sur la tête d'Oscar-a, qui sera discuté dans le prochain article.
Merci de votre attention! Passez une bonne journée à tous!