Bonjour à tous. Aujourd'hui, nous allons parler de la tête du robot promotionnel Oscar. Souvent, les gens sont intéressés à communiquer avec le robot comme s'ils étaient de leur espèce: regarder en face et chercher une réponse émotionnelle pendant le dialogue. Par conséquent, la tête de notre robot promotionnel devrait devenir l'un des principaux éléments qui attirent l'attention humaine.
Afin que la tête «prenne vraiment vie», nous avons identifié les exigences suivantes:
- La tête doit avoir deux degrés de liberté: inclinaison et rotation
- Doit être présent sur la tête de l'interlocuteur
- Les yeux du robot doivent répondre à l'interlocuteur
Structurellement, la tête était divisée en deux parties:
Conception de la tête
Tout d'abord, nous avons commencé par la conception de la tête afin de comprendre quel sera le facteur de forme et comment placer tout ce qui est souhaité dans la tête. En général, ce processus est itératif et parfois très difficile, surtout pour les ingénieurs qui ne dessinaient auparavant que des engrenages.
Après quelques itérations, nous avons obtenu un croquis, qui tenait approximativement compte de l'emplacement des servos et de la mécanique des yeux.
Le cou
La tête du robot est équipée de deux degrés de liberté: incliner et tourner la tête. La base de la conception du cou est constituée de profils et de nervures, que nous avons déjà utilisés dans le
manipulateur .
Pour contrôler les degrés de liberté, notre serveur personnalisé est utilisé. Nous allons tourner notre tête à travers la vitesse, c'est-à-dire la vitesse de rotation de la tête dépendra de la position dans le cadre de la personne suivie, puisque le serveur est capable de contrôler la vitesse. Plus le visage est éloigné du centre, plus la tête tournera rapidement. Lorsque vous approchez du centre, la vitesse diminue jusqu'à zéro. Ainsi, vous obtenez une rotation assez douce de la tête.
Les yeux
Ici aussi, nous ne voulions pas passer beaucoup de temps, nous avons donc décidé de rechercher des projets existants de yeux animatroniques, c'est bien que ces projets soient un wagon et un petit chariot. Parmi ceux que nous avons trouvés, je veux surtout noter
un projet .
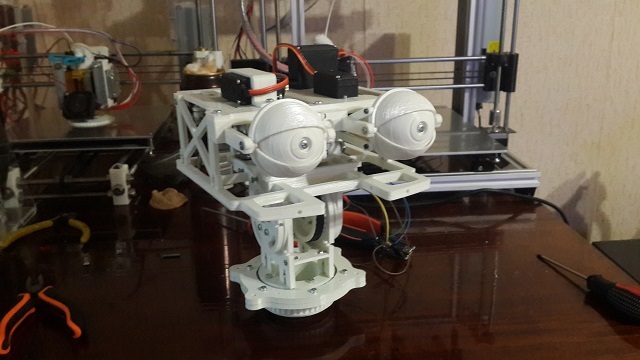
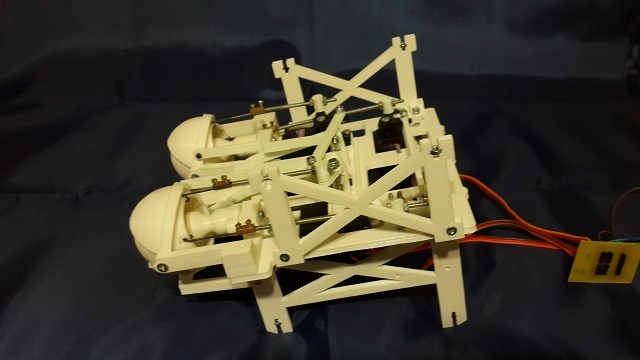
Nous l'avons pris comme base. Et tout allait bien jusqu'à ce que nous commencions à essayer de combiner la mécanique des yeux, la conception de la tête existante et la mécanique du cou. Au final, j'ai dû développer mon propre «vélo». Le résultat a été une telle conception des yeux:

Les yeux sont alimentés par arduino_nano. Pour contrôler le service, ils ont pris la
bibliothèque standard. Les servas sont alimentés par une source d'alimentation distincte, Arduino n'est pas en mesure de fournir suffisamment de courant. Au début, il y a eu des problèmes mineurs avec le «rebond» qui a gâché toute l'esthétique. Puis ils ont trouvé la raison - un régulateur de puissance de mauvaise qualité, le remplaçant par
un autre similaire - le problème a disparu. Et voici une autre chose, les servos de loisirs n'aiment pas les longs fils, nous avons donc supprimé la longueur supplémentaire entre les servos et le contrôleur. Le mouvement des yeux est mis en œuvre en réglant l'angle de rotation du servo.
Comme test, nous utiliserons la deuxième personne de notre état - Dmitri Anatolyevich Medvedev. Soudain, pour le travail acharné, une subvention pour le développement du projet «tombera» sur sa tête.
Comment ça marche?
Tout cela fonctionne tout simplement, car la tête et les yeux doivent répondre à une personne, alors la source d'information sera identique pour eux - une caméra vidéo située dans la tête du robot. Appareil photo d'occasion de Raspberry. Au fait, ici, nous avons fait un petit défaut - nous avons pris un appareil photo avec un petit angle de vision. Pendant les tests, il est devenu clair qu'il était nécessaire de mettre des caméras grand angle - les expressions faciales peuvent alors être rendues plus vivantes, car il sera possible de détourner le regard sous un angle plus grand.
Le Raspberry Pi 3 est utilisé comme processeur d'image. Je voudrais dire que Malinka fait face à cette tâche avec confiance, mais c'est vrai à basse résolution, tout en donnant une charge notable sur les 4 cœurs.
La détection des visages est effectuée par un instrument classique - la cascade de Haar. De plus, la fréquence de détection des visages est de 9 à 12 FPS.
Par analogie avec une personne, le robot regarde d'abord l'interlocuteur, puis tourne la tête vers lui. Malgré la vitesse de rotation de la tête relativement élevée disponible, nous l'avons ralentie. En apportant la vitesse de rotation de la tête en fonction de la vitesse de détection des visages, nous avons obtenu des mouvements fluides et gracieux.
Nous étions satisfaits de notre tête assemblée. Qu'en penses-tu? Que puis-je ajouter ou faire d'autre?
Et ensuite?
Nous terminons maintenant l'assemblage du deuxième manipulateur, après quoi nous passerons à la fabrication d'une plate-forme avec un coffre. Et tout cela devra être exposé dans un immeuble décent. Espérons que dans le prochain article, nous présenterons notre idée originale en pleine gloire.
Vous restez ici, tout le meilleur pour vous, bonne humeur et santé!