Que fait un développeur dans de rares heures de loisirs? C'est vrai, parcourant les listes de prix des magasins de fer. Il y avait une minute gratuite et j'ai décidé de parcourir les pages des boutiques en ligne populaires - l'ennui, rien d'intéressant, nous avons déjà vu tout cela ... et puis soudain mes yeux tombent sur le prochain Mega. Bah! Oui, ce n'est pas seulement Mega, mais combiné à l'ESP8266 bien-aimé de tout le monde et soigneusement équipé de commutateurs pour que deux contrôleurs fonctionnent ensemble - câblés (en utilisant Ethernet Shield) avec beaucoup de GPIO et Wi-Fi pour les communications sans fil.
Pas mal! J'ai pensé et me suis souvenu de
AMS - vous pouvez y installer deux serveurs - câblés et sans fil et les connecter en un seul système - ESP8266 recevra 54 broches numériques et 16 broches analogiques, et Mega recevra le contrôle sans fil via Wi-Fi et tous les petits pains ESP8266. Il y a longtemps, je ne suis pas tombé sur un tableau aussi intéressant.
- Bonjour! Avez-vous une carte
Mega + ESP8266 ?
- Oui, mais il n'en reste qu'un.
"Pourquoi un seul?"
- Le reste a été démonté.
"Réservez-la, s'il vous plaît, pour moi."
Quelques mots sur l'entreprise
J'ai aimé RobotDyn deux choses: la première - avec ses solutions technologiques. Il n'est pas nécessaire d'aller loin, un excellent exemple est la carte Mega + ESP8266 à l'étude. Quelque chose comme ça que je n'ai pas vu dans nos magasins en ligne (et pas dans le nôtre, mais je ne l'ai pas vraiment cherché ici). Et ce n'est pas le seul exemple, il y a toujours l'option Uno + ESP8266 et l'entreprise ne va clairement pas s'arrêter là, apparemment il y a encore beaucoup d'appareils intéressants qui nous attendent.
Et le second est sa politique de prix. Je ne m'attarderai pas sur cette question ici en détail, mais je dirai que les prix m'ont agréablement surpris - la devise de la société est "Les prix sont comme sur Aliexpress".
En un mot, j'ai décrit le contexte sur lequel tous les événements ultérieurs se dérouleront, maintenant nous allons directement aux détails techniques et à une description de la carte et comment travailler avec elle.
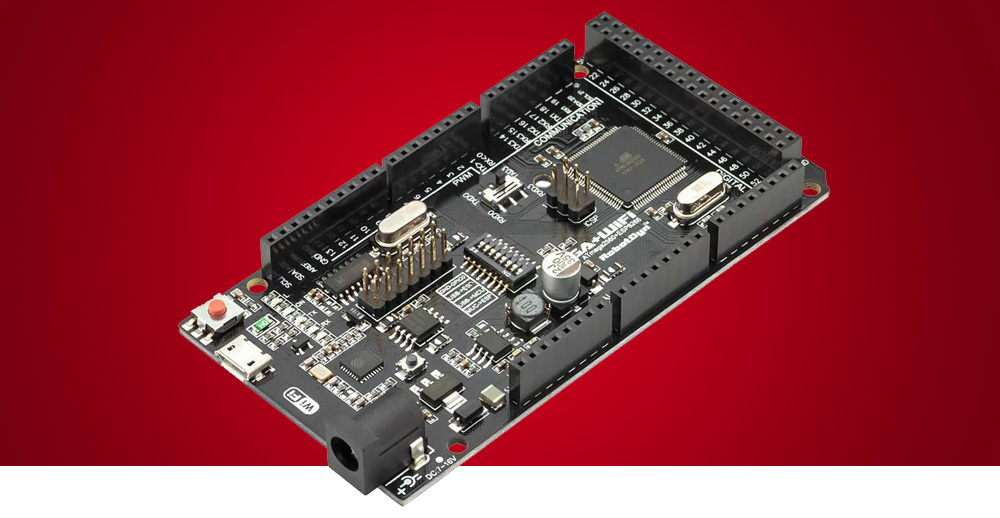
Le conseil lui-même
En général, une carte ordinaire, pas très différente de beaucoup de cartes similaires, sinon pour une petite partie, à savoir la puce ESP8266EX intégrée dans la carte. Cela transfère immédiatement la carte dans la catégorie des solutions extraordinaires. Je veux attirer votre attention sur un détail supplémentaire - la carte n'intègre pas un module standard tel que l'ESP-12, mais la puce et tout le câblage sont effectués sur la carte elle-même, ce qui fait allusion de manière transparente au niveau des développeurs. Je tiens également à noter que la carte a à la fois une antenne imprimée et un connecteur pour connecter une antenne externe, ce qui dans de nombreux cas peut être très utile.
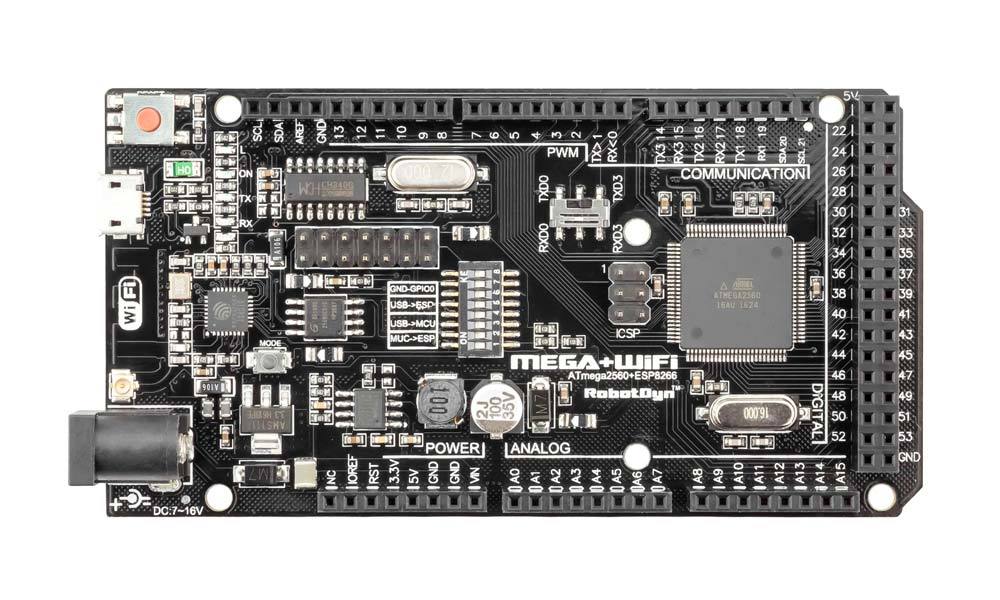
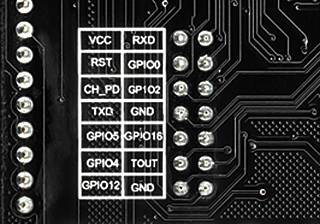
Il y a des connecteurs à broches sur la carte pour la connexion aux bornes ESP8266 et plusieurs commutateurs, qui méritent d'être mentionnés un peu plus. L'idée principale de l'utilisation de la carte est qu'en utilisant les commutateurs, vous pouvez configurer l'interaction de ses trois composants de différentes manières: la puce Atmega2560, la puce ESP8266EX et le convertisseur CH340G USB-TTL. Des connexions simples et complexes sont possibles, ce qui vous permet d'organiser de nombreuses options pour l'interaction de toutes les parties de la carte. Cela ouvre de grandes opportunités pour la construction de divers appareils, mais plus à ce sujet plus tard.
Je veux également noter la capacité de charge décente de la carte. À en juger par les inscriptions, il est capable de fournir un courant de charge de 1,6 A sur un canal de 5 volts et de 1 A sur un 3,3 volts. Ce qui est très bon, surtout dans l'ensemble.
Il n'y a plus rien à dire sur la carte, nous nous tournons vers l'installation du logiciel et son test.
Test de carte
Étant donné que la carte est intégrée et qu'il n'y a pratiquement pas d'espace libre sur elle, et que le câblage de la partie haute fréquence de l'ESP8266EX est fait dessus, au début, des doutes ont surgi sur le fonctionnement correct et sans problème de toute cette économie.
Pour l'avenir, je dirai que malgré mes préoccupations, tout fonctionne de manière stable et comme prévu. Nous connectons les commutateurs de la carte Atmega2560 à USB - nous obtenons l'Arduino Mega, nous connectons l'ESP8266EX à USB - nous obtenons l'ESP8266, nous passons au mode de connexion de l'Atmega2560 avec l'ESP8266EX nous obtenons la connexion entre les puces via l'interface série. Tout fonctionne exactement comme décrit dans la documentation et exactement comme prévu intuitivement.
Un énorme avantage de cette solution est que les développeurs ont pris soin de faire correspondre les niveaux de signal logique de tous les composants du système. Quiconque a essayé manuellement de configurer le module ESP8266 et de connecter correctement toutes les résistances de pull-up me comprendra. Il n'y a pas de tels problèmes, tout votre travail est réduit à cliquer sur les commutateurs de la carte conformément aux instructions du fabricant.
Test de charge
Comment tester la planche? Vous pouvez télécharger un croquis standard, mais ce sera un test pour rien. Cette option peut fonctionner correctement et dans des conditions de combat, le système échouera. Par conséquent, le travail des deux parties sous le contrôle des versions correspondantes de l'Arduino Mega Server a été choisi comme test de charge dure. Pour Mega - Arduino Mega Server pour Mega et pour ESP8266 - Arduino Mega Server pour ESP8266 dans la version M1.
Le kit de distribution M1 a été choisi en raison du fait que seulement 1 Mo de mémoire flash pour ESP8266 est installé sur la carte. À mon avis, c'est presque la seule erreur pour les développeurs - dans les futures révisions de la carte, je recommanderais de mettre des puces de mémoire de 4 Mo. La différence de prix est faible et les possibilités d'utilisation de la version avec 4 Mo sont bien plus importantes. Mais comme il existe une version AMS pour les systèmes de 1 Mo, je n'ai pas prêté beaucoup d'attention à ce point et j'ai continué les tests.
Que dire? Nous allumons la carte, remplissons le logiciel et obtenons deux serveurs indépendants. Un câblé sur Ethernet Shield et un sans fil sur Wi-Fi. La beauté!
Je voudrais également noter que même l'ajout d'un bouclier Ethernet avec un lecteur de carte à ce système déjà sophistiqué n'a pas causé de conflits ou de pannes - tout a simplement fonctionné comme il se doit. Et dans certains cas, c'est encore mieux que d'habitude - c'est la première carte sur laquelle le micrologiciel en direct ESP8266 a réussi dans 100% des cas, sur toutes les autres cartes et modules, il y a des échecs de temps en temps avec un tel clignotement.
Et deux serveurs tournent, chargent la planche, remplissent leurs fonctions et ... c'est tout. Tout fonctionne, il n'y a rien à dire, mais c'est probablement le meilleur éloge pour tout système technique.
Le plus intéressant
Ce que j'ai décrit ici est intéressant d'un point de vue purement académique: une planche intéressante, une solution technique intéressante, mais bien sûr nous nous intéressons à son application pratique. Quel est son point fort pratique et appliqué?
Le fait est qu'avec un interrupteur sur la carte, vous pouvez connecter deux de ses pièces (Mega et ESP) en une seule unité et ainsi, d'une part, obtenir un nouveau système de qualité et, d'autre part, compenser les défauts inhérents à chacune de ses pièces individuelles.
Commençons par l'ESP8266. Le principal inconvénient de cette excellente solution est le manque catastrophique de broches GPIO. Comme on dit, un, deux et mal calculé. Il est difficile de dire ce que les développeurs de cette puce pensaient, mais avant la sortie de l'ESP32, ils avaient un peu plus de temps pour réfléchir et ils ont corrigé cette lacune dans la nouvelle puce. Mais nous traitons spécifiquement du 8266.
Cette carte vous permet de faire bouger un cheval et d'utiliser toute la puissance de Mega, et ce, entre autres, 54 sorties numériques et 16 sorties analogiques dans l'ESP8266. Autrement dit, notre ESP branlant obtient soudainement de grandes opportunités pour travailler avec des capteurs, des actionneurs et d'autres périphériques. Il s'avère, pour ainsi dire, bébé ESP sous stéroïdes.
Ce n'est qu'une des options possibles pour utiliser la planche, allongée à la surface.
Voyons maintenant Mega. Elle n'interfère pas avec l'interface sans fil et la capacité d'interagir avec les appareils Wi-Fi, ce qui peut lui permettre de s'intégrer à la partie ESP du système. Et en même temps, la possibilité d'un fonctionnement en parallèle via une interface Ethernet filaire demeure.
Et ce n'est également qu'une des applications possibles de cette planche, allongée en surface.
Eh bien, diverses options de pont: Ethernet - Wi-Fi, nRF24 - Ethernet, nRF24 - Wi-Fi, nRF24 (1) - nRF24 (2), nooLite - Wi-Fi, nooLite - Ethernet, nooLite (1) - nooLite (2 ), etc., etc. à l'infini. Vous pouvez acheminer les signaux de dizaines de sous-systèmes avec lesquels l'Arduino Mega Server fonctionne entre les deux parties de la carte et les interfaces qui leur sont connectées.
Je ne sais même pas quoi dire. Très cool.
Détails techniques
Maintenant, un peu sur les détails techniques. Vous voyez un tableau dans lequel tous les modes de fonctionnement possibles de la carte sont présentés et toutes les positions possibles des interrupteurs sur celle-ci sont affichées. Examinons brièvement chaque mode.

Arduino Mega 2560
Le mode de fonctionnement le plus simple de la carte, dans le tableau, il est désigné comme mode 3. Si vous réglez les commutateurs 3 et 4 sur la position ON, et le reste sur la position OFF, nous obtenons l'Arduino Mega 2560 habituel. Rien d'intéressant, pour cela, cela ne valait pas la peine d'acheter cette carte, vous pouvez était d'acheter le Mega habituel.
ESP8266
Ce n'est pas non plus un mode de fonctionnement très intéressant. Dans le tableau, il est divisé en deux sous-modes, désignés par 1 (chargement de l'esquisse dans ESP) et 2 (mode de connexion ESP à USB). C'est toute la fonctionnalité de l'ESP8266 standard et pour une telle utilisation, cela ne valait pas la peine d'acheter cette carte, vous pouvez vous en tirer avec le module ESP habituel.
Tous sont indépendants
Nous ne considérons pas non plus cette option au numéro 6, car en elle toutes les connexions entre les parties de la carte sont rompues et elle ne peut certainement nous être utile pour rien.
La connexion entre Mega et ESP
Dans ce mode, désigné par 5, la communication est établie entre Mega et ESP via une interface série, mais il n'y a pas de communication avec le convertisseur USB-TTL. ESP utilise Serial standard, tandis que Mega n'utilise pas moins Serial3 standard. La connexion fonctionne de manière stable et transparente à une vitesse de 115200. Il s'agit d'un mode de fonctionnement plutôt spécifique lorsqu'aucun contrôleur n'a de connexion USB. Et donc il n'est pas non plus très intéressant pour nous.
Communication entre Mega et ESP et Mega et USB en même temps
Mais c'est ce qu'on appelle un atout. Nous avons tout à la fois - la connexion Mega USB et la possibilité de télécharger des croquis sur Mega et de contrôler son fonctionnement via le même USB, la possibilité de communication entre Mega et ESP et la possibilité de télécharger des croquis sur l'ESP8266 et de contrôler son fonctionnement dans l'interface USB ... Mega! C'est-à-dire une farce complète, sans quitter directement la caisse.
Il s'agit du seul mode de fonctionnement correct répertorié dans le tableau. Rappelez-vous son numéro gagnant, qui est quatre. Dans la configuration des commutateurs sur la carte, il est également magnifique - 1, 2, 3, 4 sont en position ON, les autres sont OFF.
Un lecteur attentif vous demandera: comment télécharger des croquis sur l'ESP8266 si le port USB est occupé à se connecter à la méga-partie du système? Et c'est la bonne question, la réponse n'est pas possible. Et pourquoi, alors, écrivez-vous que dans cette configuration, nous pouvons télécharger des croquis sur ESP8266? Parce que l'Arduino Mega Server a la possibilité de télécharger des croquis en direct directement à partir de l'IDE Arduino en appuyant sur quelques boutons, donc c'est vrai - nous avons un rembourrage complet, tout fonctionne immédiatement.
Mais qu'en est-il de ceux qui veulent utiliser la carte sans Arduino Mega Server? Il n'y a que deux options: cliquez constamment sur les commutateurs ou ajoutez la possibilité de télécharger des croquis dans les airs dans vos conceptions. Personnellement, j'aime davantage la deuxième option.
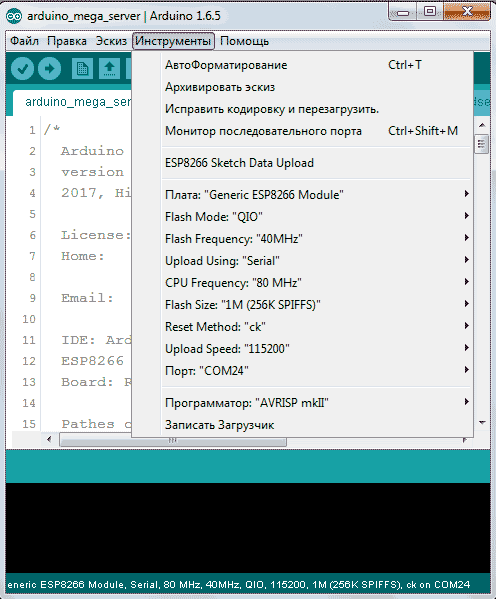
Paramètres IDE Arduino
Les paramètres Arduino IDE pour Mega ne posent pas de questions, tout y est standard, et pour ESP8266 je donnerai une capture d'écran du menu avec les paramètres pour une implémentation spécifique de la partie ESP sur la carte RobotDyn. Vous devez définir les mêmes paramètres pour vous-même, à l'exception du numéro de port - sur votre système, il aura très probablement une valeur différente.
Arduino Mega Server pour RobotDyn Mega + ESP8266
Pour cette carte, une version spéciale double du Arduino Mega Server a été publiée, qui contient deux serveurs à la fois, optimisés spécifiquement pour cette carte. C'est l'extérieur de la question, ces deux serveurs contiennent des fonctionnalités standard et peuvent être utilisés pour n'importe lequel de vos projets.
Vous pouvez utiliser ces deux serveurs indépendamment sur la même carte, ou vous pouvez ajouter les fonctionnalités dont vous avez besoin et les utiliser en tandem et en mode pont entre deux réseaux et toutes les interfaces connectées aux serveurs.
Le premier assemblage Arduino Mega Server pour la carte RobotDyn Mega + ESP8266 contient un exemple de test de l'interaction de deux contrôleurs via une interface série. Il s'agit d'une démonstration des capacités de la technologie sur la base de laquelle vous pouvez développer vos propres solutions.
Maintenant, un peu plus sur le développement d'un protocole pour l'interaction de deux contrôleurs via l'interface série en général et sur cette carte en particulier.
Développement de protocoles
Que devons-nous construire une maison? Besoin de développer un protocole d'interaction entre les deux parties du système via l'interface série? - nous allons développer, ici l'essentiel est de définir clairement et correctement la tâche. Pour démontrer le fonctionnement en tandem du système, nous affichons les indicateurs de fonctionnement «partenaire» dans le tableau de bord de chaque serveur.
Un peu de terminologie. Pour Mega, le «partenaire» est ESP8266, pour ESP8266, respectivement, Mega.Lorsque le partenaire travaille, l'indicateur devient vert, lorsqu'il ne fonctionne pas, rouge et gris lorsque l'état n'est pas défini. C'est très pratique - pendant le fonctionnement, vous verrez immédiatement l'état de l'alter ego de votre système.
Pour une solution pratique à ce problème, il y a exactement un million de façons, nous choisirons les suivantes: les blocs de communication des deux parties du système seront identiques, l'interaction se produira en mode duplex intégral, les blocs d'informations auront un format simple et compréhensible:
?=
ou
?
Ceci est juste un exemple de test pour résoudre la tâche, vous pouvez modifier ce protocole d'interaction ou écrire le vôtre, adapté à vos tâches. Mais sur le protocole déjà implémenté, vous pouvez non seulement surveiller l'état du partenaire, mais aussi l'utiliser à de nombreuses autres fins, par exemple pour transmettre l'état des broches du contrôleur, l'état des capteurs ou envoyer des commandes de contrôle au partenaire.
Plus précisément, dans notre système, les équipes ressembleront à ceci:
? mega = 1 - Mega envoie des données sur ses performances. Paramètre "méga", valeur "1".
? esp = 1 - ESP8266 envoie des données sur sa santé. Le paramètre est "esp", la valeur est "1".
Par exemple, considérons la mise en œuvre du protocole pour la méga-partie du système.
De manière standard, nous initialisons le module AMS et le matériel Serial3 Mega à une vitesse de 115200.
void robotdynInit() { Serial3.begin(115200); modulRobotdyn = MODUL_ENABLE; started("RobotDyn", true); }
Nous vérifions l'état du port Serial3 et dans le cas des données du partenaire, nous formons la variable chaîne serialReq contenant les données ou commandes reçues.
void checkSerial() { while (Serial3.available() > 0) { if (sFlag) { serialReq = ""; sFlag = false; } char c = Serial3.read(); if (c == 10) { sFlag = true; parseSerialStr(); } else if (c == 13) {
Nous analysons les commandes et les données, et en cas d'informations sur l'état du partenaire, nous prenons des mesures sous forme de modification de l'état de la variable esp.
void parseSerialCmd() { String command, parameter; if (serialReq.indexOf(F("?")) >= 0) { int pBegin = serialReq.indexOf(F("?")) + 1; if (serialReq.indexOf(F("=")) >= 0) { int pParam = serialReq.indexOf(F("=")); command = serialReq.substring(pBegin, pParam); parameter = serialReq.substring(pParam + 1); } else { command = serialReq.substring(pBegin); parameter = ""; } if (command != F("esp")) { Serial.print(F("command/parameter: ")); Serial.print(command); Serial.print(F("/")); Serial.println(parameter); } if (command == F("esp")) { if (parameter == F("1")) { esp = 1; espTimer = millis(); } else { esp = 0; } } }
Vous pouvez facilement ajouter le traitement de toute autre commande en modifiant et en ajoutant à la section de code correspondante.
if (command == F("esp")) { if (parameter == F("1")) { esp = 1; espTimer = millis(); } else { esp = 0; }
Si vous utilisez beaucoup de commandes et de données dans vos propres projets et analyses, cette section de code est préférable de concevoir sous la forme de fonctions correspondantes.
Il ne reste plus qu'à considérer la fonction standard du module AMS, qui est responsable de son travail. Tout d'abord, l'état du port est vérifié, puis toutes les quatre secondes, une commande est envoyée au partenaire que Mega est en vie et fonctionne, et le temps écoulé depuis la réception des dernières données du partenaire est vérifié, et s'il dépasse 8 secondes, il est conclu que le partenaire ne fonctionne pas.
void robotdynWork() { checkSerial(); if (cycle4s) { Serial3.println(F("?mega=1")); if (millis() - espTimer > 8000) { esp = 0; } } }
C’est de la magie. C'est vrai, rien de compliqué?
Code complet du module responsable des communications intersystèmes entre Mega 2560 et ESP8266 #ifdef ROBOTDYN_FEATURE bool sFlag = true; unsigned long espTimer = millis();
A quoi ressemble la sortie sur le moniteur série
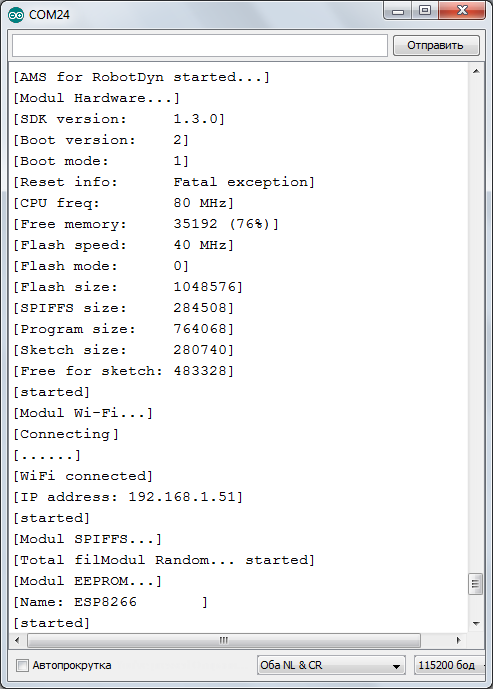
Dans le moniteur série Mega 2560, la sortie, les données et les commandes de la partie ESP du système ressemblent exactement à la sienne. Afin de distinguer la sortie du partenaire de la sortie de Mega, ses données sont entourées de guillemets carrés. Dans ce cas, vous pouvez voir le redémarrage de l'ESP8266 et le journal de démarrage AMS dans le moniteur série de Mega.
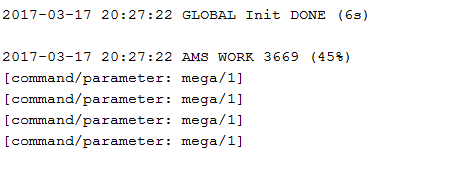
Et le journal de l'échange réel de commandes entre les deux parties du système via l'interface série. Vous voyez la sortie de l'ESP8266 avec des informations sur le décodage des données d'état Mega dans l'interface série de Mega, entre guillemets carrés.
La beauté dans l'interface
Maintenant, un peu sur la façon dont tout cela ressemble à l'interface Arduino Mega Server. Pour commencer, je vais donner des captures d'écran des deux parties du système au travail.
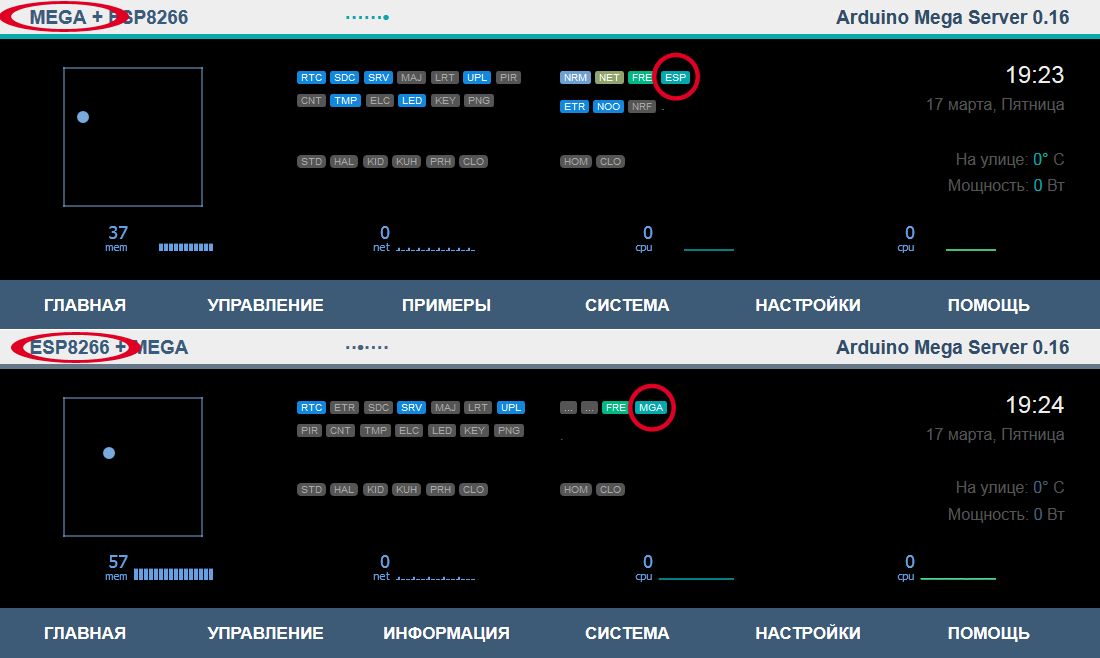
Les points de suspension sont entourés d'inscriptions identifiant le contrôleur et la partie du système avec laquelle vous travaillez actuellement. Les cercles sont entourés d'indicateurs qui indiquent le statut du partenaire. Pour le moment, tout est en ordre, les deux parties du système fonctionnent normalement et interagissent normalement entre elles via l'interface interne. Si quelque chose ne va pas, vous le saurez après un maximum de 8 secondes.
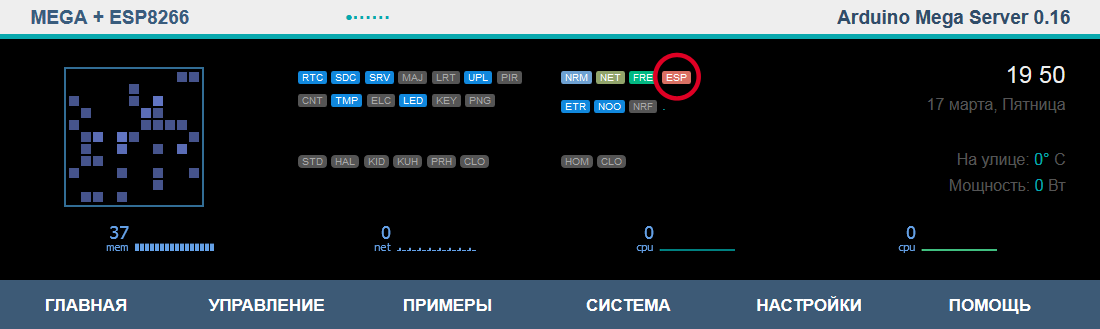
Quelque chose a mal tourné. L'ESP8266 a reçu une mise à jour du firmware par voie aérienne et la méga-partie du système a enregistré le moment de son redémarrage. Après quelques secondes, la partie ESP du système reprendra et le voyant s'éteindra en rouge.
Pour plus de commodité, lorsque vous survolez l'indicateur d'état du partenaire, un indice apparaît et vous pouvez cliquer dessus et dans une fenêtre distincte, l'interface de la deuxième partie du système, dans ce cas la partie ESP, s'ouvre. Cela se fait par commodité, vous pouvez à tout moment ouvrir en un clic l'interface de la deuxième partie du système.

Idées de projets
Maintenant, un peu sur ce que vous pouvez faire de tout cela, avoir un peu d'imagination. La planche habituelle, complètement discrète à première vue, vous permet de faire beaucoup de choses complètement inhabituelles et intéressantes. Cela est particulièrement vrai de la combinaison avec l'Arduino Mega Server.
Donc, la première chose qui me vient à l'esprit:
Transférer les données des capteurs entre les contrôleurs. Des deux côtés et en quantités illimitées. C'est un système qui a les avantages de ses deux parties, et les possibilités ne s'ajoutent pas seulement, mais ce qu'on appelle un effet synergique est observé.
Le pont entre les interfaces. Arduino Mega Server peut fonctionner avec de nombreuses interfaces et ce système vous permet d'acheminer des données et des commandes entre toutes les interfaces filaires et sans fil connectées.
Travaillez sur le même réseau lorsque Mega via Ethernet Shield et ESP8266 via Wi-Fi communiquent avec des appareils câblés et sans fil sur le même réseau.
Fonctionne dans différents réseaux lorsque Mega est connecté à Ethernet câblé et ESP8266 via Wi-Fi à un autre réseau et que le système achemine les commandes et les données d'un réseau à un autre.
La sortie d'une partie du système dans l'interface d'une autre. Via Ethernet à l'aide de flux Web standard ou via une connexion série interne.
Débogage Une partie du système peut agir comme débogueur et testeur d'une autre partie du système selon votre programme.
Minuteur de surveillance. Chaque contrôleur peut agir comme une sorte de chien de garde par rapport à un autre.
Échecs de journalisation. Chaque contrôleur peut garder des journaux du travail de son partenaire, compiler des statistiques et rapporter des situations alarmantes.
Base de données pour ESP8266. En utilisant ce système, vous pouvez organiser quelque chose comme une base de données SQL sur Mega pour ESP8266. ESP fait son travail, et Mega agit comme un système de stockage (jusqu'à 32 Go).
Se clignotant. Les contrôleurs peuvent reflasher dynamiquement les uns les autres conformément à la logique intégrée ou à l'arrivée d'une commande de contrôle externe.
Connecter les modules. Les contrôleurs peuvent se connecter à divers périphériques qui ont des problèmes de connexion à une partie du système.
Et ainsi de suite et ainsi de suite, je pense qu'un lecteur curieux sera en mesure de trouver indépendamment de nombreuses façons non moins intéressantes d'utiliser ce système.
Conclusion
À mon avis, c'est une solution très intéressante, et nous devons dire un grand merci à RobotDyn pour des
frais aussi intéressants. Je le dis au moins sincèrement.
Téléchargez le kit de distribution Arduino Mega Server pour RobotDyn Mega + ESP8266 et vérifiez personnellement la validité de tout ce qui est écrit ici, vous pouvez sur le site officiel du projet Arduino Mega Server dans la section de
téléchargement .