Aujourd'hui, je veux vous parler un peu de ce qui s'est passé depuis la
publication du
dernier article , où j'ai raconté comment nous avons fait du GPS sous-marin tous les trois en un an.
Nous avons décidé en temps réel d'évaluer l'écart entre notre GPS sous-marin et le vrai GPS. Et pas seulement avec le GPS, mais avec des données GPS / GLONASS combinées. Si vous êtes intéressé par ce qui s'est passé, bienvenue chez cat!
En général, nous avons en quelque sorte déjà vérifié cela, mais dans de bonnes conditions "marines". L'idée est alors venue de tout vérifier en fait dans une flaque d'eau. Ici, je dois expliquer que pour toute hydroacoustique, les plans d'eau peu profonds sont considérés (et pas en vain) comme les plus difficiles. Certains fabricants ne travaillent pas du tout en eau peu profonde, ils disent qu'il y a une terrible couche de surface avec du gaz dissous et de multiples reflets, etc.
En général, il y a une merveilleuse
flaque d'eau près de nous
Voici à quoi cela ressemble depuis le rivage:

La profondeur maximale est d'environ 2 à 2,5 m, c'est-à-dire un plan d'eau plus peu profond dans lequel une navigation peut être nécessaire, il est difficile d'imaginer.
Spécialement pour les expériences à venir, un appât radiocommandé chinois a été acheté - idéal pour nos besoins: c'est assez (parfois il me semble que c'est trop) une embarcation spacieuse à basse vitesse qui permet facilement diverses modifications.
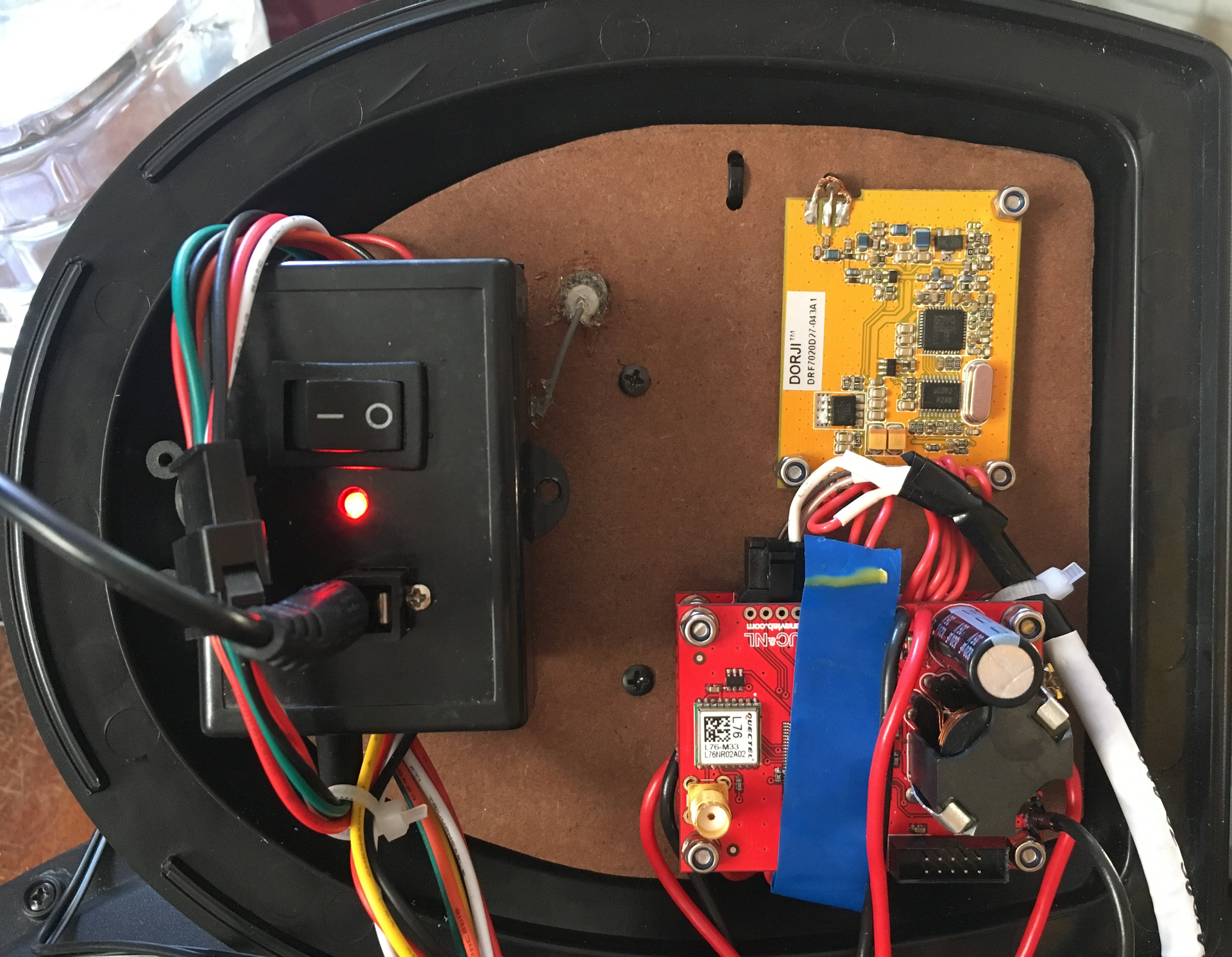
Voici à quoi ressemblait le bateau à l'origine:

Ensuite, nous avons effectué un certain nombre d'améliorations. L'électronique native est restée presque entièrement et n'a été que légèrement déplacée, à l'exception du mécanisme de réinitialisation de l'appât - comme inutile, il a été complètement démonté.
De plus installé sur le bateau:
- une carte avec un récepteur GPS / GLONASS propriétaire (non visible sur la photo - sous le panneau dur);
- Module radio DORJI 433 MHz + antenne;
- notre carte avec un processeur qui analyse la sortie du module GPS, récepteur de navigation acoustique et envoie le tout par voie aérienne;
- une batterie au plomb supplémentaire de 1,5 Ah * dont tous nos consommateurs sont alimentés;
- Connecteur de charge Bulgin Bucaneer pour cela;
- un interrupteur à bascule avec un capuchon en caoutchouc (comme sur nos bouées), qui comprend tous nos systèmes;
- une paire d'entrées de câbles simples à travers lesquelles le câble du récepteur de navigation RedNODE est inséré à l'intérieur du bateau et le câble de l'émetteur acoustique est sorti (utilisé dans une autre expérience).
Un autre tableau est visible sur la photo - c'est juste d'une autre expérience.
Comme je l'ai dit dans un article précédent, notre GPS sous-marin est un système de navigation à base longue, et pour le faire fonctionner sur un étang, quatre bouées flottantes de relais de signaux de navigation par satellite doivent être installées. C'est le principal inconvénient de la longue base - vous devez toujours mettre quelque chose sur l'étang, ce qui signifie que vous avez besoin d'un bateau. Mais cette fois, nous voulions montrer comment tout peut être fait exclusivement à partir du rivage.
Nous étions quatre (oui, nous ne sommes plus trois!), Et selon l'idée, tout le monde a pris une bouée avec lui et est allé à son point sur la rive de l'étang, où il a mis sa bouée du rivage sur une corde (pour qu'ils ne s'éloignent pas - ils n'ont pas pris le bateau) .
Ici à mon point (bouée n ° 4), cela ressemblait à ceci:

Sur la rive où je me trouvais, il y avait deux approches pratiques. Mes deux collègues sur la rive opposée ont eu moins de chance - il y a simplement une plage assez douce, envahie de roseaux, piétinée par les pêcheurs à certains endroits. En conséquence, comme on le verra de l'emplacement, la bouée n ° 3 devait être réalisée très loin du reste, simplement parce qu'à cet endroit, il était assez difficile de s'approcher de l'eau.
La capture d'écran ci-dessous montre comment les bouées ont été placées (disposées) pendant l'expérience:

Soit dit en passant, en regardant vers l’avenir, je dirai que les coordonnées des bouées sont obtenues à partir du récepteur de navigation et ne sont pas mesurées directement à terre.
La photo montre très clairement qu'à gauche de la ligne conditionnelle entre les bouées n ° 1 et n ° 2 se trouve un banc de sable. Telle qu'un héron s'y promène à pied (elle a environ un genou là-bas), ce qui n'a pas fonctionné cette fois.
De mon poste, la rive opposée ressemble à la photo suivante, et la personne assise à gauche est à nous, il tient la bouée n ° 1 sur la corde.

Sur la même photo, notre bateau lui-même est visible en cours de navigation.
Voici à quoi il ressemble assemblé à côté d'une de nos bouées:

Les câbles de bouée devaient être raccourcis en les tirant vers l'œil porteur de la bouée avec une chape en nylon, sinon l'émetteur serait simplement couché sur un fond boueux. En position normale, la distance entre le bord de l'eau et l'émetteur acoustique de la bouée est de 1,5 mètre. Vous pouvez également voir que le récepteur de navigation acoustique est monté sur un câble suffisamment long. Sa longueur est de 1,5 mètre, rappelez-vous cela, à l'avenir, il expliquera certaines des caractéristiques des résultats.
L'influence d'un cylindre suspendu librement sur le mouvement du bateau est très importante. En fait, le rayon de braquage des 3-4 mètres déjà indécents est devenu terrifiant: en eau calme, il faut 10 à 15 mètres pour tourner. Mes tentatives pour garder le bateau sur la bonne voie avec un léger vent latéral seront visibles sur les pistes résultantes.
En parlant de pistes. Avant l'expérience, il n'y avait aucune certitude à 100% que le système, en principe, fonctionnerait correctement dans de telles conditions. Néanmoins, j'ai vu le premier point sur l'écran près d'une minute après que le récepteur a été immergé dans l'eau.
Je l'ai vu sur l'écran de notre application technologique, quelque chose comme ça:
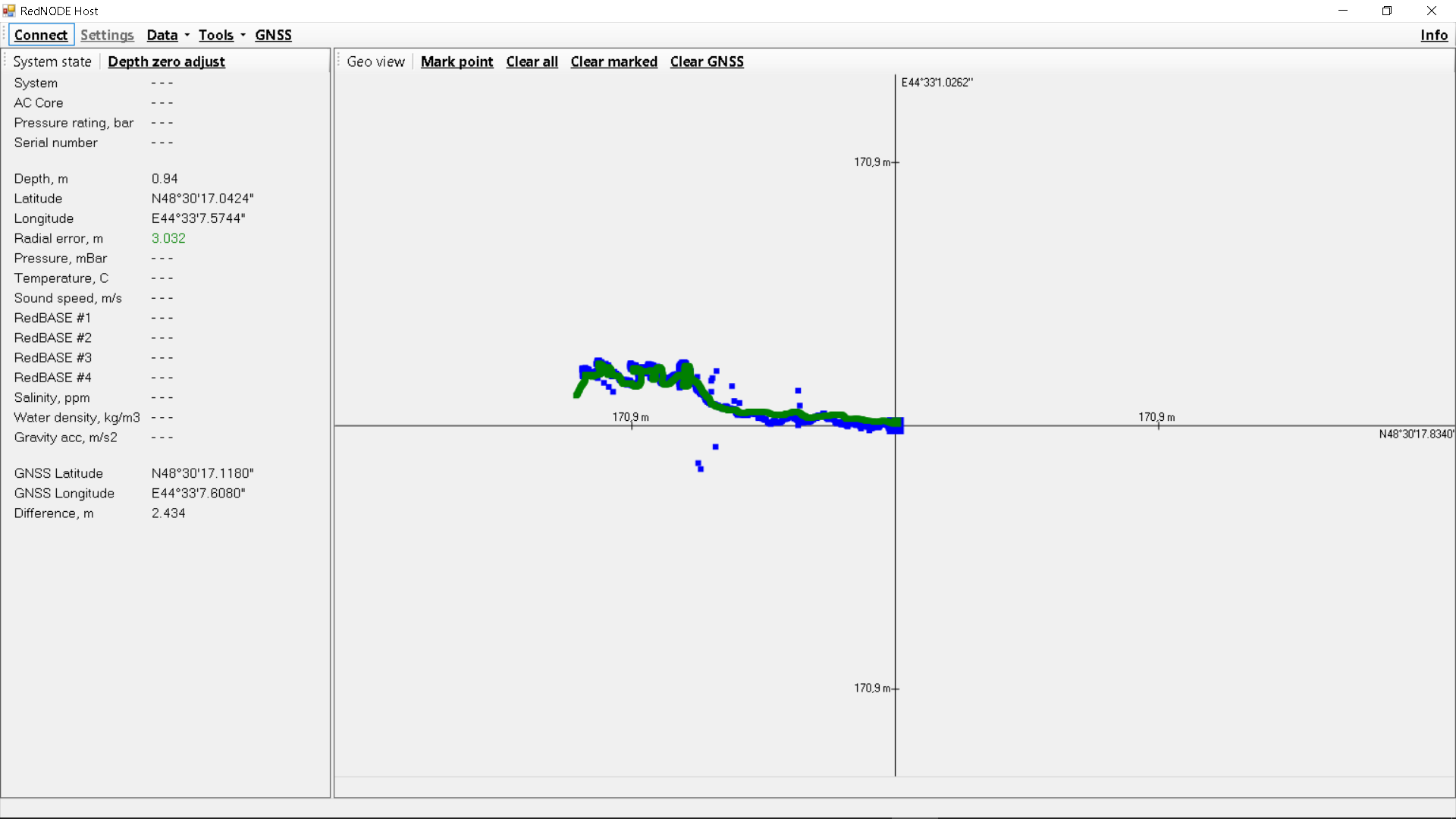
La trace du récepteur GPS / GLONASS est affichée en vert et la trace du récepteur acoustique est affichée en bleu. La ligne inférieure dans le panneau de gauche affiche la valeur de la différence en mètres entre la lecture actuelle selon GPS / GLONASS et le système de navigation acoustique. Je dois dire tout de suite que le «combinateur» de données collectées à la hâte n'a sélectionné qu'une partie des informations transmises par le récepteur de navigation et que de nombreux champs sont restés vides.
Et enfin, les morceaux qui en résultent dans toute leur splendeur:
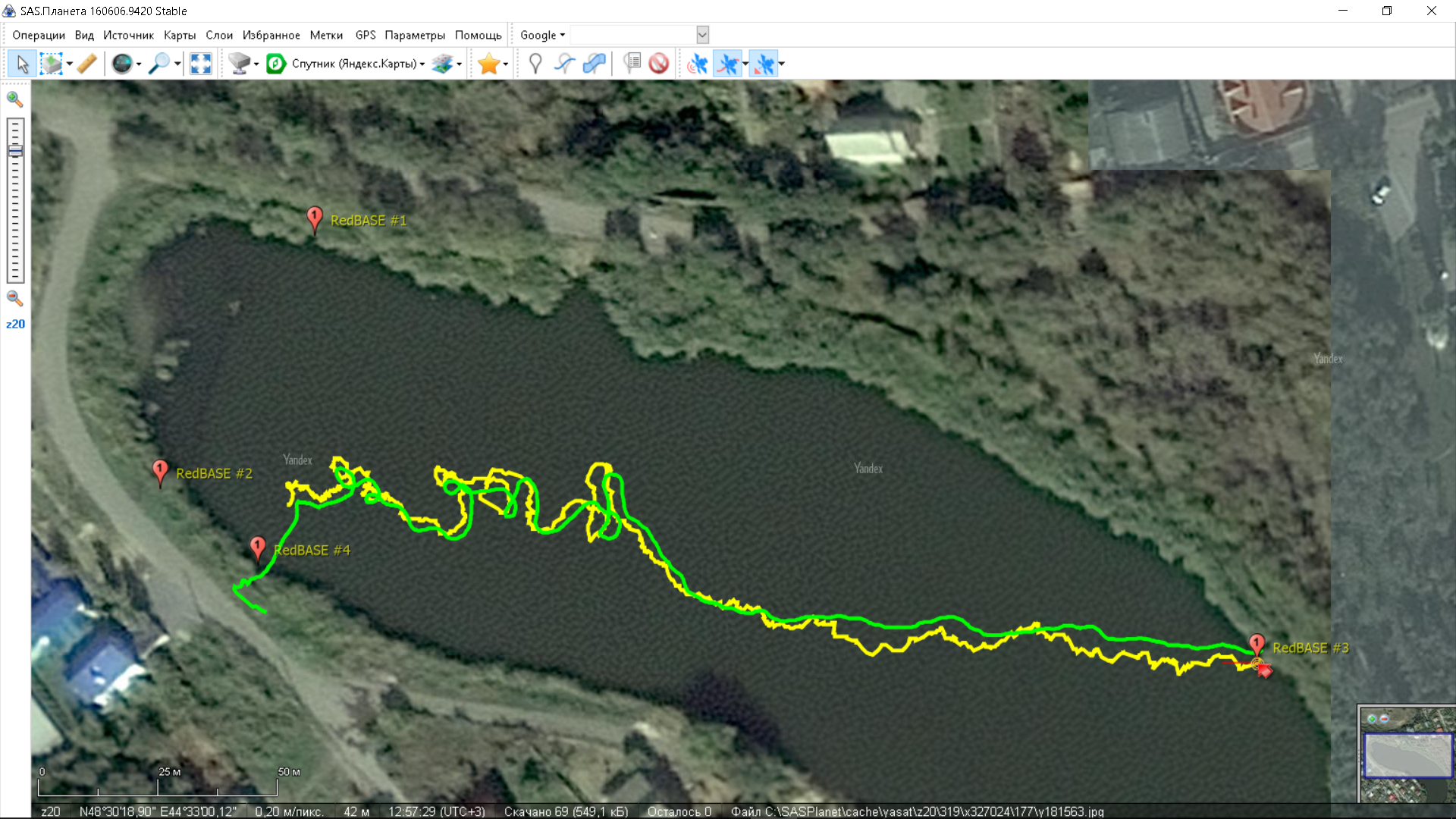
La différence maximale entre les trajectoires à différents endroits est d'environ 3 mètres, ce qui s'explique, tout d'abord, par le fait que le système de haut-parleurs est beaucoup plus affecté par le mouvement de l'objet positionné sur la précision de la position calculée, tout simplement parce qu'entre la réception des signaux des bouées elle parvient à bouger suffisamment, et, d'autre part, le fait que le récepteur de navigation acoustique pendait sur un câble de 1,5 mètre derrière le bateau avec toutes les conséquences qui en découlaient.
Les répétitions de la trajectoire avec un certain retard obtenues en utilisant le système de navigation acoustique dans les parties de celui-ci où le bateau manœuvrait intensément semblent très caractéristiques.
En général, nous n'avions pas prévu une si longue randonnée banale de peur de perdre le bateau dans les roseaux, mais à un moment donné, j'ai réalisé qu'il était peu probable que je puisse déployer le navire en toute sécurité et j'ai décidé de le diriger dans le vent, ce qui l'a juste amené à notre bouée. 3, où il a été capturé en toute sécurité par mon collègue.
Qu'avons-nous des résultats de l'expérience?
- le système fonctionne dans un réservoir monstrueux en termes d'hydrologie
- la précision est comparable à la précision du GPS terrestre
- ne nécessite aucun étalonnage
- n'intègre pas plus compliqué qu'un récepteur GPS conventionnel
- le déploiement ne prend pas beaucoup de temps (dans notre cas, trois bouées étaient à l'eau après 5 minutes, et la quatrième après 10 autres, et puis, tout ce temps a été consacré à contourner l'étang)
Il n'est pas pratique d'afficher les pistes en détail à l'aide de l'image, donc je télécharge les pistes séparément afin que toutes les personnes intéressées puissent les analyser:
pistes RedWAVE 12-05-2017Merci de votre attention.
"Et c'est tout pour aujourd'hui!" (C)
Attention! Mettre à jour! Il s'est avéré que si vous suivez le lien vers notre
flaque d'eau , vous pouvez voir qu'un drone aurait volé juste au-dessus du lieu de nos expériences au moment de tirer sur la zone:
