
C'était à la mi-mai, les moteurs de recherche explosent à cause des demandes liées aux soi-disant filateurs fidget, Youtube est jonché de vidéos sur les filateurs de bricolage, le monde est embourbé dans le battage médiatique sur ces conceptions de filature.
Quelque part en même temps, une pensée folle est venue dans ma tête, qui a déplacé tous les autres sur le côté et assis sur le piédestal a prononcé - "Vous devez faire un spinner fidget POV!".
Et cette histoire a commencé par une simple demande sur Google et une surprise ultérieure, il s'avère que personne n'a encore fait un tel appareil, cela m'a dynamisé et m'a beaucoup motivé, la passion que je voulais faire d'un appareil électronique que les ingénieurs chinois n'ont pas encore atteint.
Gardant ce fusible à l'intérieur, j'ai pris un crayon et du papier. Tout d'abord, je me suis limité aux dimensions du boîtier ce qui m'a donné une certaine liberté dans le choix des composants, mais en même temps je n'irais pas bien au-delà de la portée d'un spiner conventionnel. Ensuite, la chose la plus intéressante a été l'évaluation de la fonctionnalité optimale et la sélection des équipements.
L'affichage POV doit clairement être fait à l'aide de LED, et comme notre boîtier est petit, la taille du cadre 0603 semblait optimale. Le nombre de LED de la gamme a été sélectionné sur la base de la vidéo sur diverses platines POV vues sur Youtube.
Je voulais manger tout ce bien d'une batterie Li-po avec la capacité de charger, et depuis le dernier projet, j'avais toujours des microcircuits
MCP73831 inutiles, et les batteries 3.7V et 250mAh traînaient également, alors j'ai rapidement fermé cette question.
Les choses étaient un peu plus compliquées avec le choix du contrôleur et du capteur pour déterminer la rotation complète du spinner (à un moment donné, j'ai même voulu bricoler et tout faire sur l'accéléromètre, mais j'ai réalisé que c'était trop). Il y avait 2 pensées dans ma tête - un capteur Hall ou un capteur optique. Mais un rapide coup d'œil aux fiches techniques des capteurs Hall, j'ai été surpris de constater que d'après ce que j'avais en main et ce que notre magasin «rural» de composants radio avait vendu, je n'avais pas de capteur fonctionnant à 3-3,7 V, mais des capteurs optiques avec leur goutte sur la LED vers 1,2 V, ils ont commencé à paraître plus rentables.
En introduisant un modèle de nouveaux capteurs infrarouges dans le circuit, j'ai soudain pensé à une question non triviale: "Que vais-je réellement produire?" Un brainstorming de dix minutes a produit la fonctionnalité minimale nécessaire pour un tel appareil. L'option avec les inscriptions et les symboles préparés n'a pas été particulièrement pensée (car c'était la plus courante), l'option d'afficher le nombre de tours de la fileuse est également venue immédiatement, et l'idée finale était de faire afficher l'heure.
Le
microcircuit d'horloge en temps réel
DS3231 semblait convenir - le boîtier est plan, pas haut, l'heure montre, de 3-3,7V cela fonctionne bien, d'accord, je l'ai commandé, nous attendons.
Le contrôleur a décidé de choisir plus que moins dans la position et de régler
ATmega8 , il y a un ADC à bord, i2c pour le DS3231 est implémenté, des jambes décentes, de la mémoire aussi. Les composants sont sélectionnés, le schéma pour faire le travail ne se pose pas.

En plus de tracer le diagramme, j'ai rêvé frénétiquement que je serais le premier à faire une telle modernisation des filateurs et, comme on dit, à «faire un peu de battage médiatique» et peut-être même à attirer une centaine d'autres personnes qui seraient intéressées par mon invention.
Le schéma est simple, mais la décision de fabriquer la carte elle-même a un peu compliqué le processus de câblage, j'ai tout de même fait la carte 30 mm x 20 mm pour la première fois et la technologie LUT a donné ses limites.
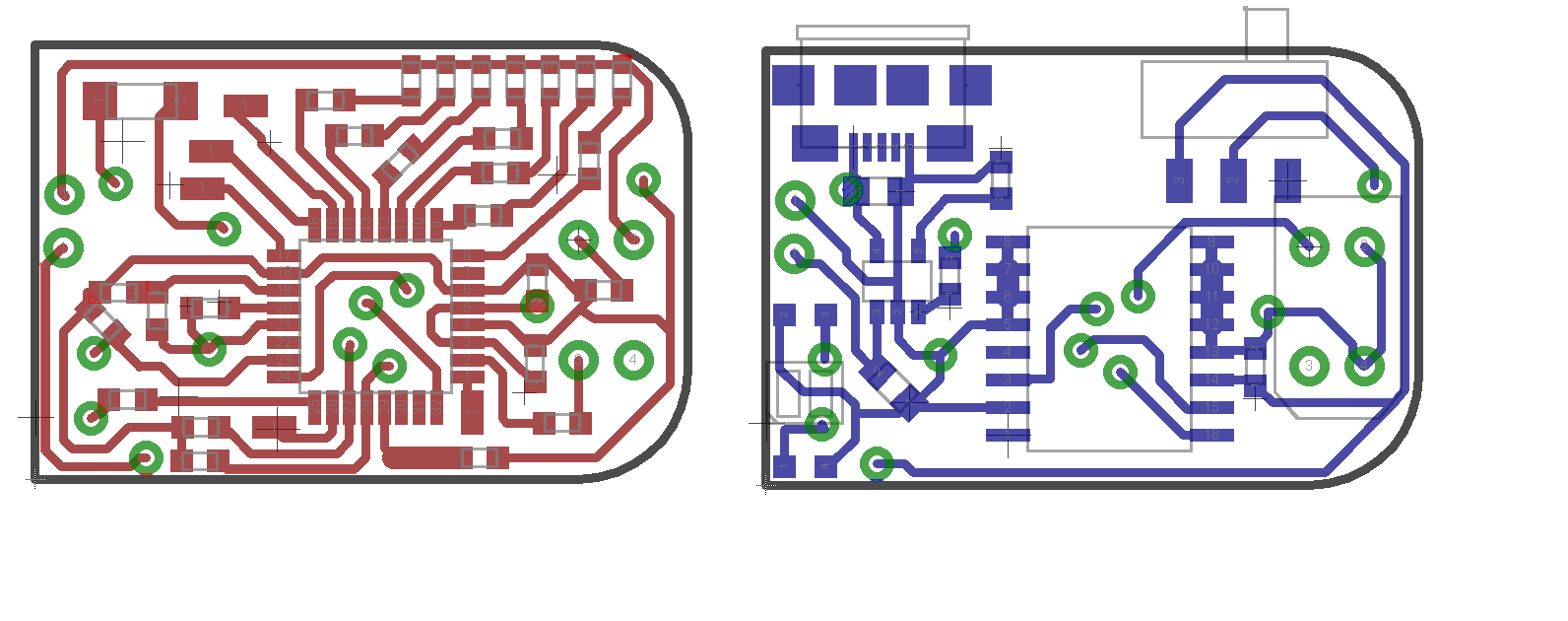
En parallèle avec le câblage, j'ai fait un modèle d'un boîtier simple avec les trous nécessaires pour le connecteur micro-USB, l'interrupteur d'alimentation, une paire de capteurs optiques et des boutons pour une configuration minimale.

Pourquoi deux capteurs optiques? Après avoir réfléchi au concept, j'ai décidé de saisir l'opportunité pour l'avenir de déterminer automatiquement où se trouve maintenant la main de la personne qui tient le spiner et d'afficher l'inscription dans l'espace à main levée (à ce moment-là, la position du capteur par le bas ne me dérangeait pas, même s'il était clair qu'il était plus logique de le placer sur le dessus, eh bien ok, prototype après tout).
À peu près au moment où j'ai fabriqué la carte, j'ai réalisé que je voulais refaire la majeure partie du circuit entier, j'ai eu l'idée d'utiliser des LED RGB et l'option avec un module Bluetooth à travers lequel je pouvais envoyer des données au spinner, mais le désir de faire au moins quelque chose que la sortie des symboles et des chiffres prévalait et j'ai décidé de laisser ces idées aux futures options pour les filateurs.

Après avoir soudé les éléments à la carte, avec mon ancien fer à souder soviétique, je me suis immédiatement souvenu qu'il était temps de commander le boîtier. L'absence d'une imprimante 3D personnelle m'a toujours déprimé, mais le crapaud à l'intérieur, qui regardait un prix de 30 à 50 000 pour une imprimante plus ou moins moyenne, m'a étouffé davantage et nous avons convenu que je ne pouvais acheter qu'un nouveau fer à souder.
L'électronique est prête, maintenant la chose la plus intéressante est le firmware du contrôleur. Ayant à peu près perverti, j'ai scellé le poids du bon vieux connecteur de programmation et interrupteur à bascule BH-10
géant , afin de couper complètement l'alimentation.
Je dois dire tout de suite - j'ai tué 2 puces, la raison en était l'inattention (j'ai juste oublié que je n'avais pas de carte d'usine avec des trous métallisés et à cause de cette omission, l'alimentation des puces était incorrecte et le firmware du bit fusible s'est écrasé avec une erreur).
Alors qu'il y avait un nouveau lot de puces, j'ai réussi à refaire un peu le câblage et à faire une nouvelle version de la carte, propre et belle, dans le passé, certaines pistes ont été supprimées de la soudure des puces. Il a également écrit un firmware de test, qui était censé sortir la ligne dans une position statique, et en même temps modifié le boîtier entrant avec un fichier et un scalpel.
Quelques jours se sont écoulés et j'ai reçu de nouvelles puces, j'ai scellé la première puce avec béatitude, j'ai tout bourré dans le boîtier et flashé le micrologiciel de test, trahi soigneusement ce spiner à vitesse angulaire, pour la première fois de ma vie, une bande verte brillante de LED brillantes qui n'a pas laissé sa place a causé un bonheur enfantin dans ma tête .
Après quelques minutes, je me suis calmé et j'ai arrêté de «taper» sur le spinner pour prolonger cette sensation. Quelques heures plus tard, un firmware a été écrit qui affichait déjà une chaîne de 8 chiffres, selon mes calculs, l'inscription aurait dû prendre 120-130 degrés, cela s'est avéré ainsi, mais visuellement ce n'était pas très beau et j'ai réduit l'angle à un œil agréable.
Ensuite, il a été décidé de découvrir à quelle vitesse tournait mon miracle déséquilibré.
Cela tourne un peu, mais vous devez tenir compte du fait que le spiner est décemment équilibré dans cette vidéo, la charge globale sous la forme d'un interrupteur à bascule et du BH-10 se fait sentir, bien que j'aie essayé de les organiser de manière optimale pour le centre de gravité.
L'étape suivante, je voulais voir l'heure sur cet appareil et je me suis accroché à la fiche technique du DS3231, pendant quelques soirées, j'écrirais un code de firmware qui
me permettait de régler et d'afficher l'heure. Zadono a décidé de vérifier si tout ce que j'avais créé correspondait à l'affaire.

Il s'adaptait parfaitement et même fermait hermétiquement le couvercle, eh bien, bien sûr, tout était déséquilibré aussi, mais pour le premier échantillon, cela me convenait, j'ai même pensé à faire un boîtier avec une taille de roulement différente, en raison de laquelle il y aurait un endroit supplémentaire pour sceller avec du plomb ou quelque chose comme ça .
Et maintenant, je suis si heureux, pensant que dans quelques jours je compléterai la fonctionnalité de mon idée originale et la présenterai au public comme le premier prototype d'un spinner POV dans le monde, j'ai décidé de saisir à nouveau cette phrase dans la barre de recherche.
C'était le 28 juin, la première fois qu'une requête de recherche Google régulière me décourageait. Le premier dans les résultats de recherche était une vidéo sur Youtube, où un Américain faisait déjà tourner une toupie dans sa main, qui, comme la mienne, affichait également des révolutions par minute et toutes sortes de signes de bienvenue, et plus important encore, cette vidéo a été téléchargée sur YouTube le 25 juin.
Ensuite, il y avait un
lien où le gars s'est mis à fabriquer un spinner POV «pompé» avec des LED RGB, un accéléromètre et un mikruha pour l'IoT, a commencé à mettre en œuvre l'idée le 9 juin et a déjà une belle planche avec des LED RGB.
Je ne peux pas m'empêcher d'être surpris de voir comment, après tout, dans un laps de temps assez court (surtout compte tenu du battage médiatique sur les filateurs qui dure depuis plusieurs mois), plusieurs personnes ont pensé à une idée et ont commencé à la mettre en œuvre frénétiquement, c'est drôle.
La fabrication de collègues américains est bien meilleure, bien sûr, elle a paralysé ma motivation pour le développement ultérieur de cet appareil. L'idée qu '«ils l'ont déjà rendu plus joli et plus fonctionnel de toute façon» a doucement changé la pensée du passé pleine de confiance et d'excitation. Et quelques autres appareils «premiers au monde», qui ont été interrompus pour le plaisir de cette fileuse, n'ont pas encore réussi à créer des collègues étrangers dans l'atelier, ce qui signifie qu'il y a une chance qu'au moins je les fasse en premier.
P.S. Désolé pour la qualité de la vidéo et des photos, seul un téléphone chinois est à portée de main.