NAP * - Périphérique indépendant de base
Articles précédents sur Core Independent Peripherals Microcontrôleurs dans les alimentations à découpage
2e partie
Dans la partie précédente de l'article , nous avons examiné la possibilité de construire un contrôleur PWM "typique" d'une alimentation à découpage (IIP), les options de mise en œuvre des contrôleurs PWM basées sur un stub et certaines topologies de IIP.
Nous continuerons à nous familiariser avec les capacités des périphériques indépendants de base appliqués à la tâche de construction d'alimentations à découpage.
Convertisseur synchrone
Si la tension de sortie est suffisamment faible et devient comparable à la chute sur la diode, alors l'efficacité de la source diminue considérablement. Pour améliorer les paramètres IIP, la diode peut être remplacée par un MOSFET, dont la chute de tension est beaucoup plus faible que sur la diode en connexion directe. Nous obtenons un convertisseur synchrone.
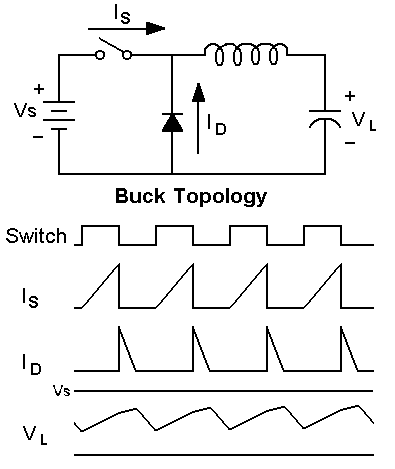
Fig. 2.1.a. Convertisseur Buck

Fig. 2.1.b. Convertisseur synchrone abaisseur
Pour la formation de deux signaux PWM antiphase, un module périphérique pour générer des signaux de sortie complémentaires (COG) est prévu.
Générateur de signaux complémentaires
vous permet de contrôler la période et le rapport cyclique d'une ou deux sorties complémentaires à l'aide de deux sources de signal d'entrée. Associé à la possibilité de contrôler les paramètres clés, tels que le temps mort, la suppression, la phase, la polarité, l'arrêt automatique et la récupération automatique, le module COG fournit un outil puissant pour construire un cœur de contrôleur PWM. Le générateur de signaux complémentaires dans les microcontrôleurs Microchip 8 bits est totalement autonome et dans le cas général ne nécessite pas l'intervention du noyau MK. Pour une connaissance plus détaillée de COG, je recommande de se référer à la description technique du TB3119 [4].
Le module COG est quelque peu similaire au déclencheur SR, il a également des entrées de configuration et de réinitialisation, mais il fonctionne sur les événements (Rising Event et Falling Event). Les événements sont enregistrés à la fois sur les fronts / récessions et aux niveaux des signaux d'entrée sélectionnés. Les signaux d'entrée peuvent être soit externes (ports d'entrée), soit internes (temporisateur, PWM, comparateurs, cellules logiques configurables, etc.). Les sorties du générateur de signaux complémentaires sont capables de fonctionner dans différents modes: demi-pont, pont complet, push-pull, PWM. Les signaux de sortie sont formés en tenant compte de la tâche du temps du compteur, de la suppression, du retard de phase et de la polarité. En règle générale, les ports de sortie du module COG ont une capacité de charge accrue (50-100mA).
Pour protéger les étages de puissance de sortie, des entrées de déclenchement sont fournies, par des événements au cours desquels les sorties du module sont transférées dans un état sûr (0, 1 ou 3ème état). Si l'alarme disparaît, le module peut être automatiquement allumé ou une intervention du programme est requise.
Le module COG permet l'utilisation de topologies avec un transformateur, qui sont couramment utilisées pour les SMPS isolés galvaniquement.
Lors de la construction de convertisseurs à l'aide de transformateurs, des modes de contrôle de tension et de courant avec contrôle proportionnel ou hystérétique sont également utilisés, c'est-à-dire tout de même ce qui a été examiné plus tôt dans la première partie de l'article.
Fig. 2.2. Topologies IPS avec transformateurs

Fig. 2.3. Mode de contrôle de tension d'hystérésis. Option avec tension de sortie fixe et réglable.

Fig. 2.4. Mode de contrôle du courant hystérétique

Fig. 2.5. Mode de contrôle actuel avec contrôle proportionnel.
Contrôle PWM alternatif multiphasé
Dans les convertisseurs polyphasés, un mode de fonctionnement entrelacé est souvent utilisé, dans lequel la séparation de courant est utilisée entre plusieurs topologies parallèles identiques. Cette topologie vous permet d'obtenir un filtrage plus efficace (moins de courant d'ondulation), de réduire la taille de la source (moins de filtre) et d'augmenter l'efficacité.
Un convertisseur entrelacé se compose de plusieurs canaux identiques, dont les entrées et les sorties sont combinées, mais les phases de commande de ces convertisseurs sont décalées de 360 ° / n, où n est le nombre de phases.
Pour un convertisseur élévateur alternatif biphasé, deux canaux fonctionnent en antiphase - deux signaux PWM sont décalés de 180 ° l'un par rapport à l'autre.
Un diagramme simplifié est illustré à la Fig. 2.6. [5]. Les touches S1 et S2 sont ouvertes alternativement. Lorsque la clé S1 est ouverte, S2 est fermée, puis L1 est chargée et L2 donne l'énergie accumulée précédemment à la charge. Ensuite, les canaux alternent.

Fig 2.6. Illustration du fonctionnement de l'alimentation à découpage entrelacée.
Ci-dessous, un schéma d'un convertisseur élévateur alternatif synchrone biphasé [6].
Le convertisseur fonctionne en surveillant la valeur de courant de crête avec une boucle de rétroaction de tension commune, qui permet de contrôler deux boucles de courant indépendantes. Le contrôleur fournit un équilibrage du courant entre les phases, une protection contre les courts-circuits et une faible ondulation pendant les transitions entre les modes de conduction continue et intermittente.
Pour le redressement synchrone, des mesures supplémentaires sont nécessaires pour éviter que le courant ne retourne à l'entrée lorsque l'inductance cesse de se décharger en mode de conductivité discontinue (DCM). L'interrupteur supérieur du convertisseur synchrone doit être désactivé lorsque le courant dans l'inductance devient nul.

Fig.2.7. Boost synchrone entrelacé biphasé
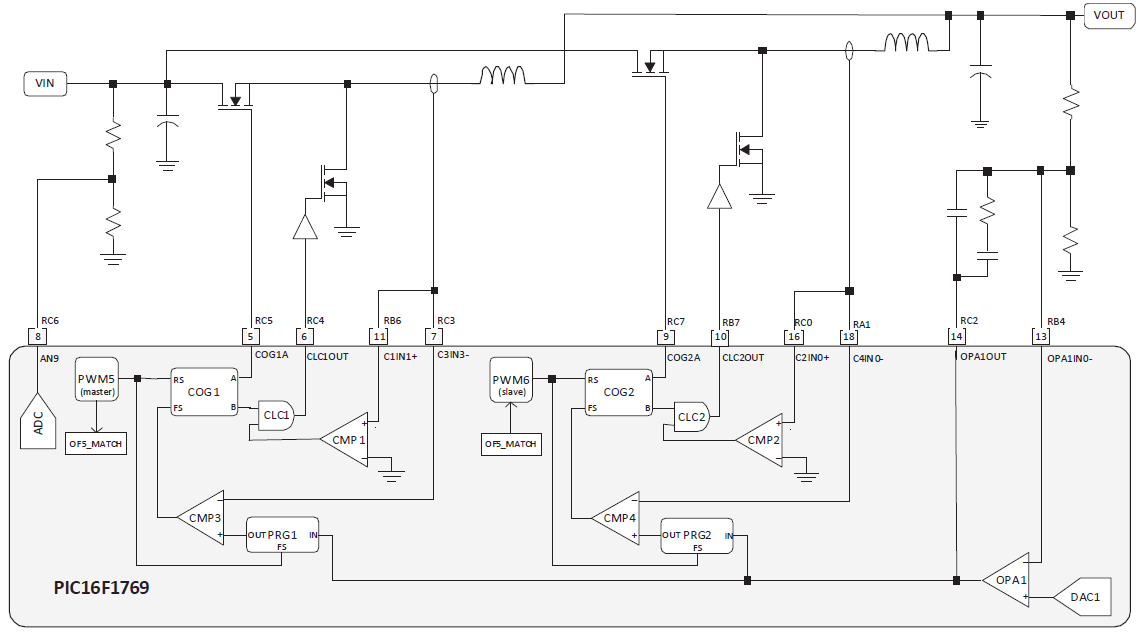
Fig. 2.8. Convertisseur abaisseur synchrone biphasé entrelacé
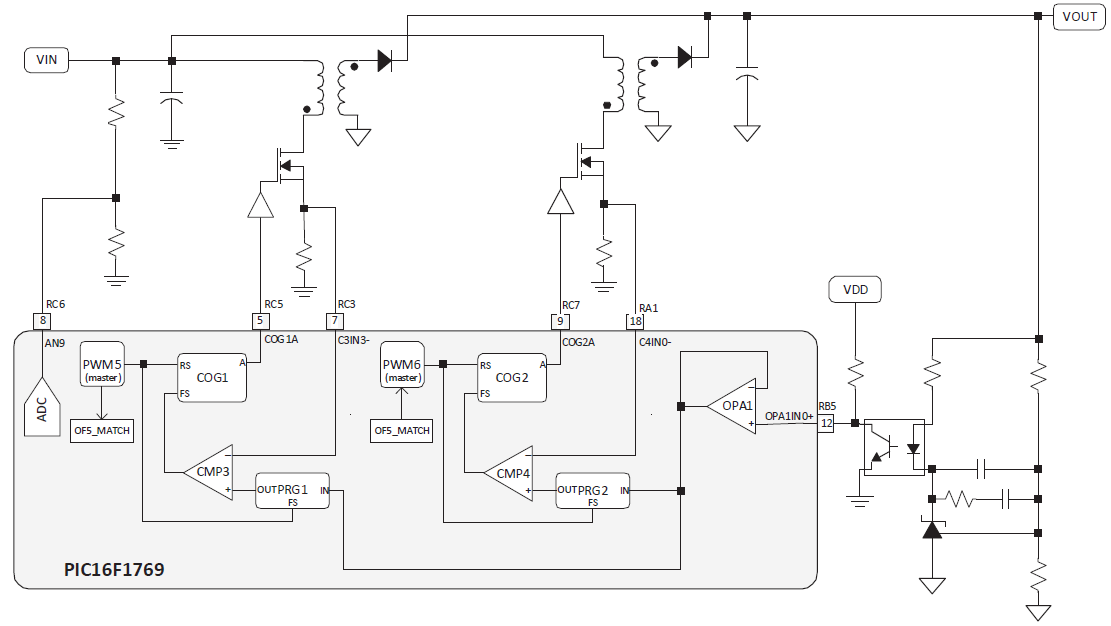
Fig. 2.9. Convertisseur flyback à entrelacement biphasé

Figure 2.10. Convertisseur linéaire entrelacé biphasé
Les détails des diverses options pour les IIP entrelacés basés sur des microcontrôleurs PIC sont donnés dans TB3155 [6].
Contrôle de fréquence variable
Dans les exemples précédents, la fréquence de déclenchement PWM est définie par la minuterie, c'est-à-dire contrôle implémenté avec une fréquence PWM fixe.
La méthode de contrôle à fréquence fixe perdra son efficacité à faibles charges, car elle a des pertes de clés fixes. Étant donné que nous envisageons des solutions sur un microcontrôleur, nous pouvons facilement fournir une fréquence de commutation variable en fonction du courant de charge et du mode de fonctionnement du convertisseur.
Dans un contrôleur avec une fréquence PWM fixe, le mode de courant intermittent est plus facilement mis en œuvre lorsque le courant ne traverse aucun élément du convertisseur.

Figure 2.11. Mode courant intermittent.
Les périphériques indépendants du cœur peuvent aider à la mise en œuvre du mode de conduction critique lorsque le courant est atteint à zéro. Dans ce cas, le contrôleur PWM modifie automatiquement la fréquence de commutation pour être en mode de conduction critique.

Figure 2.12. Mode de conduction de courant critique.
Les périphériques configurables vous permettent d'implémenter d'autres algorithmes: si vous définissez le signal du comparateur pour réinitialiser la minuterie, vous pouvez implémenter le contrôle avec un temps d'arrêt fixe (Fixed Off Time) ou avec un temps d'activation fixe (Fixed On Time ou Constant On Time).
La gestion avec un temps d'activation fixe vous permet de construire un IPS avec correcteur de puissance [7].
Figure 2.13. Un contrôleur PWM commandé en tension dans une configuration à temps fixe (COT) en mode de conduction critique.
Nous avons donc examiné une topologie de IIP. Tous les périphériques nécessaires à la mise en œuvre des contrôleurs PWM sont contenus dans les microcontrôleurs de la série PIC16F176x. Nous pouvons implémenter n'importe laquelle des topologies décrites sur la périphérie indépendamment du cœur, c'est-à-dire le fonctionnement des contrôleurs PWM décrits ne dépend pas de la vitesse du noyau.
À suivre ...
Articles précédents sur Core Independent Peripherals Utilisé et recommandé pour l'étude Littérature[4] TB3119. Fiche technique du générateur de sortie complémentaire. www.microchip.com
[5] Dynamique et contrôle des systèmes électroniques commutés. Chapitre 2. Modulation de largeur d'impulsion http://www.springer.com/978-1-4471-2884-7
[6] TB3155. Contrôleur PWM entrelacé multiphasé avec émulation de diode utilisant des microcontrôleurs PIC 8 bits. www.microchip.com
[7] TB3153. Exemples de fonctions implémentées avec le générateur de rampe programmable. www.microchip.com