Tout le monde connaît le système Raspberry Pi, qui a légitimement gagné la reconnaissance, non seulement de la fraternité professionnelle, mais aussi des célibataires autodidactes. Nous allons maintenant parler d'un autre projet intéressant dans le domaine de la robotique.
Veterobot est un petit robot tout-terrain dont la particularité est l'ouverture des technologies de fabrication et des logiciels.

Un petit robot soigné est littéralement rempli de capteurs et possède un processeur assez puissant. Le cœur de ce dernier est l'ordinateur de bord BeagleBoard-xM. Il s'agit d'un système ouvert avec processeur Texas Instruments ARM. Sa puissance est suffisante pour contrôler les périphériques, exécuter des algorithmes complexes et même compresser la vidéo au format H-264 en temps réel (en utilisant DSP). Ce dernier est très nécessaire étant donné qu'à bord de l'appareil, il y a deux caméras vidéo qui peuvent être utilisées pour contrôler le mouvement.
En général, le remplissage du robot a déjà initialement quatre télémètres à ultrasons, une boussole numérique, un GPS et des caméras vidéo. La gestion peut être effectuée via WLAN ou 3G (en mode test), et il est également possible de contrôler à distance le robot via Internet (pour cela, vous avez juste besoin de caméras embarquées).
Tous les composants de l'appareil sont ouverts et accessibles à tous les arrivants. Par conséquent, les capacités de ce robot ne sont limitées que par l'imagination de l'utilisateur.
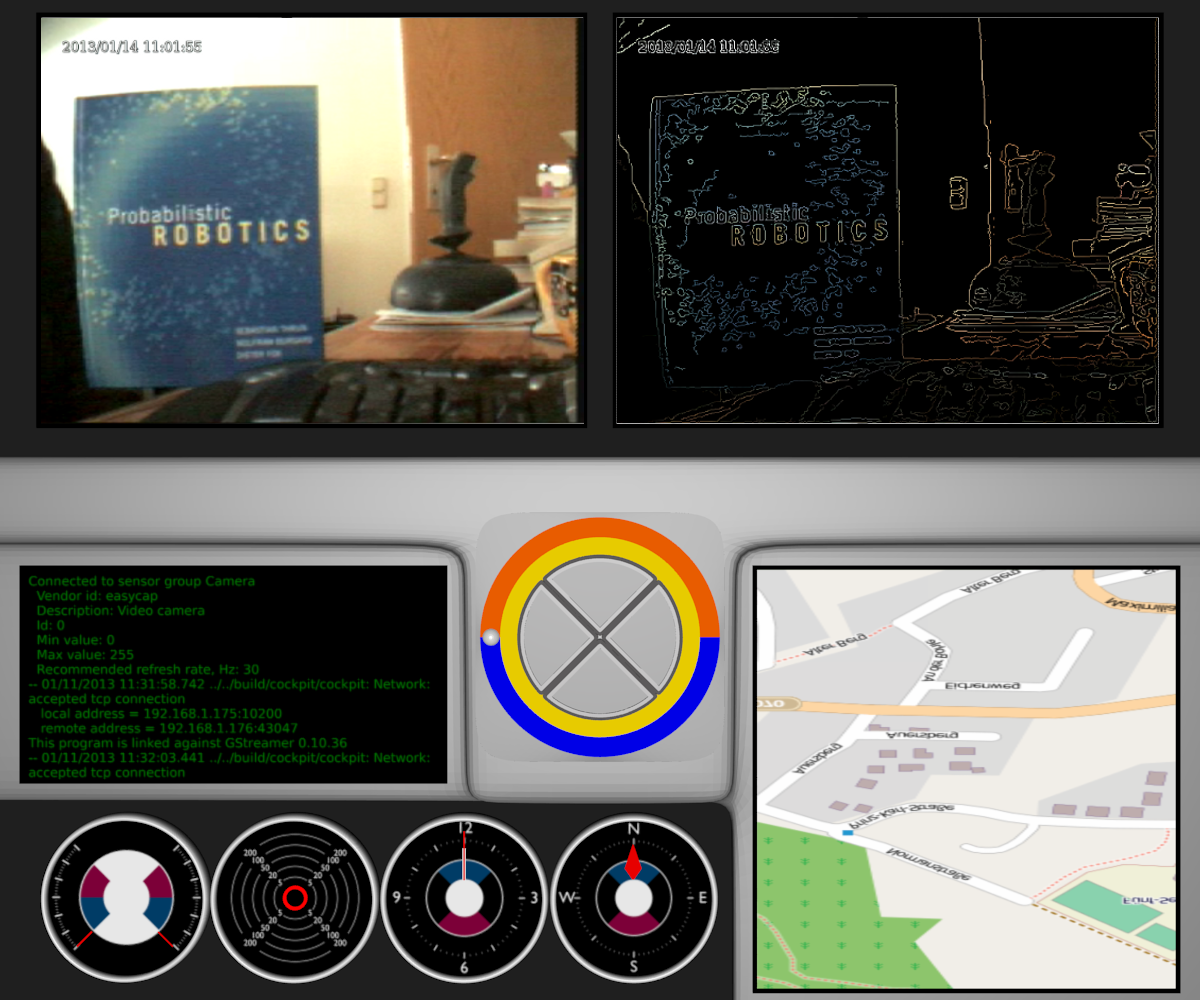
Le remplissage logiciel du robot consiste en un mélange d'Angstrom Linux, Xenomai, ZeroC's Ice et d'autres composants. Un programme spécial vous permet également de contrôler l'appareil et de contrôler les lectures des capteurs. Sa fenêtre de travail est dans la capture d'écran ci-dessous.
La technologie d'impression tridimensionnelle est utilisée pour créer le boîtier du Veterobot, et les modèles eux-mêmes ont été exécutés dans le programme Blender. Une exception est le châssis fini du Dagu Rover 5, qui est équipé de deux moteurs avec des capteurs d'angle. Mais il est probable que d'autres composants soient connectés à l'appareil. Au moins dans la
présentation 3D du robot, il y a la possibilité de changer le châssis, même si je n'ai pas rencontré la mention de cela sur le site. L'application elle-même a également été réalisée à l'aide du moteur 3D gratuit Blend4Web (la présentation s'ouvre dans un navigateur Web et utilise WebGL), et les sources sont dans le pool général du projet.

En conséquence, nous avons obtenu un appareil intéressant qui pourrait plaire aux chercheurs ou aux passionnés de robotique. Bien que le coût de l'appareil soit assez élevé, ses composants, schémas, modèles 3D, etc. sont disponibles en téléchargement dans le référentiel
git-hub , et le site lui-même contient des instructions pour l'auto-assemblage.
PS L'auteur de l'article n'a rien à voir avec les développeurs de l'appareil.