Les endoscopes flexibles sont conçus pour grimper dans les endroits les plus inaccessibles du corps humain. Pas par curiosité - mais pour le bien du patient. Mais peu importe ce que le chirurgien voit à l'aide d'un endoscope, il ne peut pas l'extraire ou le couper avec le même endoscope. Par conséquent, vous devez aller de l'autre côté, à la fois au sens littéral et figuré, en grimpant dans le corps humain par des coupures sur son corps.
Un groupe de scientifiques de Harvard a décidé de combiner l'endoscope avec un bras robotisé afin de pouvoir mener des opérations directement «en place», pour ainsi dire. Le manipulateur a plusieurs modes de liberté, ainsi que la possibilité de supprimer certains objets ou tissus. Le manipulateur se cache dans l'endoscope pendant qu'il se dirige vers la cible. Et dès que le bon endroit est atteint, le rôle du roboruk vient.
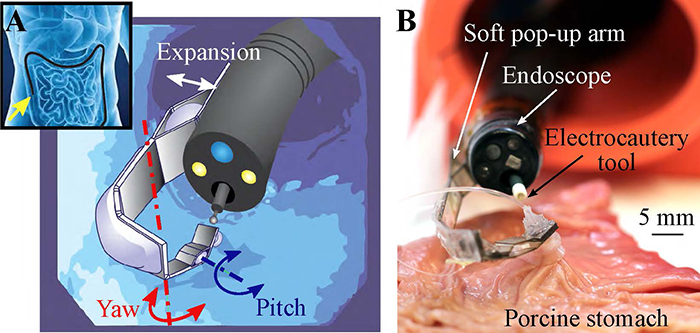 Illustration pour la description du concept du manipulateur et une photographie du bras du robot lui-même. À droite, le manipulateur effectue une opération directement dans le tractus gastro-intestinal. Ce ne sont que des «essais sur le terrain», mais ils semblent toujours impressionnants.
Illustration pour la description du concept du manipulateur et une photographie du bras du robot lui-même. À droite, le manipulateur effectue une opération directement dans le tractus gastro-intestinal. Ce ne sont que des «essais sur le terrain», mais ils semblent toujours impressionnants.De manière générale, les robots mous trouvent leur application dans de nombreuses branches de la science, de la technologie et de la médecine. Les caractéristiques de leur conception sont telles qu'un médecin (après tout, nous parlons de médecins) peut les utiliser avec un haut degré d'efficacité à l'intérieur du corps humain. Certes, les capacités des robots sont limitées.
«Au niveau millimétrique, les appareils souples deviennent vraiment mous, de sorte qu'ils ne peuvent pas endommager une sorte de tissu, mais ils ne peuvent pas non plus effectuer d'opérations avec ce tissu. Cela limite l'application de microsystèmes souples pour le travail médical. La question est de savoir si nous pouvons créer des robots logiciels capables de développer des efforts suffisants sans compromettre la sécurité », a commenté Tomazzo Rantsani, l'un des développeurs du projet.
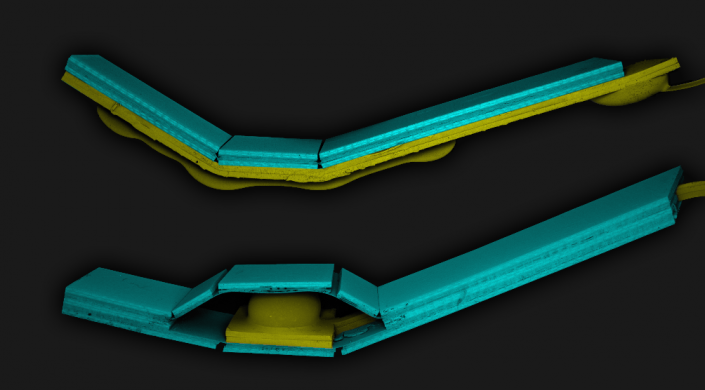
L'équipe a réussi à créer un modèle de travail du manipulateur en utilisant un "squelette" suffisamment solide et élastique entouré de matériaux souples. Les scientifiques disent que lors de la création de leur roborouki, ils ont été guidés par les principes de la création de figurines en papier origami. Comme mentionné ci-dessus, le manipulateur peut atteindre le but, il prend une forme complètement différente, poussant, en fait, le manipulateur. Après cela, le chirurgien peut effectuer les opérations dont il a besoin.
Pour mettre l'ensemble du système en mouvement, les scientifiques ont décidé d'utiliser des actionneurs qui fonctionnent sur l'eau. Ils se connectent aux composants solides du squelette à l'aide de liaisons chimiques, de sorte que des attaches adhésives supplémentaires (ou d'autres types d'attaches) ne sont pas nécessaires. Il y a un manipulateur et une ventouse dans la liste des outils, qui fonctionne sur le même principe que les ventouses des céphalopodes. Les scientifiques ont effectué une opération de test dans un œsophage artificiel en utilisant du tissu porcin. L'expérience a été réussie, le manipulateur, sans endommager les tissus délicats, a effectué l'opération, tout a été fait de la meilleure façon possible.
La dernière version du manipulateur a pu effectuer des opérations avec des objets miniatures, dont la taille ne dépasse pas plusieurs millimètres. Entre autres éléments, le roboruk est équipé d'un capteur de rétroaction afin que le chirurgien, effectuant une opération ou un examen du patient, puisse se faire une idée de l'effort requis pour effectuer n'importe quelle procédure. Et cela peut être l'une des conditions d'une opération réussie.
À l'avenir, les spécialistes prévoient de réaliser l'opération déjà dans des conditions réelles, mais probablement pas sur une personne, mais sur un animal. «Notre technologie nous permet de développer des robots souples de petite taille qui sont nécessaires en médecine.»
Les robots mous sont nécessaires non seulement en médecine, mais aussi en production. Plus récemment, des scientifiques de l'Université scientifique et technique de Chine
ont montré un manipulateur pneumatique souple qui ressemble à une chenille. Soit dit en passant, ce système a également été développé en collaboration avec des scientifiques de Harvard.
Ce type de robot peut capturer et transporter divers objets, même lourds, suivre le pointeur et effectuer d'autres tâches. À l'avenir, les Chinois prévoient de former leur robot non seulement pour capturer, mais aussi pour utiliser des outils, en les transférant à une certaine distance.