Le premier système de navigation acoustique sous-marine domestique disponible dans le commerce UKB-system
Nous ne perdons pas le rythme. Depuis la publication de notre précédent article,
Underwater GPS: la suite a été presque un été, et aujourd'hui je vais vous dire ce que nous avons fait tout ce temps.
Dans le premier article sur notre
GPS sous-marin, nous avons fait un bref examen des systèmes de positionnement existants et de l'acoustique sous-marine en particulier.
Sous la coupe, je vais parler de la façon dont nous avons créé un système à base ultra-courte.
Ainsi, au cours de la 2015e année, nous avons promis de nous engager dans des systèmes UCB (USBL - ultrashort base-line). L'essence de ces systèmes est la présence d'une source de signal (balise-transpondeur par exemple) et d'une antenne qui détermine la direction d'arrivée du signal. Réseau phasé ou simplement: antenne radiogoniométrique.
Beaucoup de nos utilisateurs ont d'une manière ou d'une autre dénoncé l'inconvénient relatif de la procédure de placement du flotteur et que les coordonnées sont établies «en dessous» (comme dans notre GPS sous-marin).
Parfois, vous souhaitez
toujours fixer une balise à un objet positionné (un plongeur ou un TNPA / ANPA) et déterminer l'emplacement par rapport au point de contrôle de surface (bateau, jetée, etc.) en abaissant l'antenne USBL dans l'eau. En termes de facilité de déploiement, c'est le système le plus pratique et le plus simple. par exemple, le MicronNAV mentionné dans notre premier article est un système USBL typique, ainsi que
celui-ci . Le tristement célèbre NaviMate, en théorie, était également prévu comme un système UKB: une bouée flottante devrait diriger les plongeurs, calculer leur position absolue et la leur renvoyer.
Une antenne radiogoniométrique est assez courante. Par exemple, les sous-marins ont des réseaux d'antennes conformes contenant des milliers de transducteurs individuels. Bien sûr, on ne peut pas dire que personne n'a fait de systèmes UKB avant nous en Russie. Cependant, à notre connaissance, le nôtre est le premier système domestique disponible sur le marché (et généralement le plus abordable!).
Mais rien dans cet univers n'est gratuit. Pour plus de commodité, vous devez payer. Selon notre collègue, qui a développé l'algorithme de fonctionnement du système de radiogoniométrie et est l'auteur du firmware de l'antenne radiogoniométrique:
«L'utilisateur UXB appréciera la facilité de déploiement .... les 10-15 premières minutes. Autant qu'il serait nécessaire pour le placement des bouées d'un système à base longue dans la zone d'eau. "
Le fait est qu'une erreur d'estimation de l'heure d'arrivée de 1 à 2 mètres dans un système à base longue ne fera pas beaucoup de temps, car ± 1 mètre est une erreur parfaitement acceptable dans les tâches de positionnement des plongeurs ou des robots.
L'erreur dans la définition du "premier" ou "direct" rayon, dans le cas du système UHF, conduira à la détermination de la direction d'arrivée d'une certaine réflexion (ou la somme des réflexions - "rayons"), mais elle peut provenir de n'importe où, tout dépend de la zone d'eau spécifique. Cela affecte particulièrement la détermination de l'angle vertical. Attrapez une réflexion de la surface ou du bas et vous avez maintenant une plage de valeurs dans la plage de 90 degrés, et c'est un système de navigation moyen.
Dans les systèmes modernes (et le nôtre aussi), l'angle vertical n'est pas pris en compte. Au lieu de cela, la balise à transpondeur a un capteur de profondeur intégré et peut transmettre sa profondeur à la demande de l'antenne radiogoniométrique. De plus, connaissant la différence de profondeurs et la plage d'inclinaison, la distance le long de la surface est déterminée trivialement à partir du théorème de Pythagore.
De plus, le positionnement de l'antenne elle-même est séparé. Abaissé sur un câble d'un navire de soutien ou d'une jetée, il se balance et se tord dans les vagues et les courants. Par conséquent, si l'angle d'arrivée du signal est déterminé dans le système de coordonnées d'antenne, et qu'il est instable, alors cette instabilité passe à l'emplacement calculé de l'objet positionné.
Souvent, pour éviter de tels problèmes, l'antenne est montée sur un poteau. Nous le faisons aussi, bien que notre antenne ait un AHRS intégré.
Nous avons nommé notre système Zima.
dans un avenir proche, nous prévoyons de publier une version améliorée appelée Zima blizkoNotre système se compose de l'antenne émettrice-réceptrice la plus orientable Zima-B (ase). On peut le voir sur la photo ci-dessous.
 Figure 1 - Zima-B - antenne radiogoniométrique montée sur une tige
Figure 1 - Zima-B - antenne radiogoniométrique montée sur une tigeEt les balises-répondeurs Zima-R (esponder), qui peuvent être à la fois autonomes, équipées d'une batterie (comme sur la photo), et interfacées avec le porteur.
Dans ce cas, l'utilisateur devient disponible toutes nos innovations et commodités:
- la possibilité de transmettre jusqu'à 32 commandes de téléconduite
- mesure mutuelle de la distance à l'antenne radiogoniométrique
- transfert d'azimut à la station de base (s'il y a un appareil sur les médias qui détermine la direction vers le nord - une boussole chez les gens du commun)
La balise transpondeur est dans le même facteur de forme que notre récepteur GPS sous-marin, RedNODE. Comme déjà mentionné, il dispose d'un capteur de pression / température intégré pour une plage de 0 à 30 bars et permet d'obtenir une précision jusqu'à 0,05 m de profondeur et jusqu'à 0,1 degré de température. L'antenne, d'ailleurs, est également équipée du même capteur, car il n'est pas innovant de mesurer la profondeur par câble.
 Figure 2 - Zima-R - transpondeur de balise (avec batterie)
Figure 2 - Zima-R - transpondeur de balise (avec batterie)Nous avons effectué les tests généraux du système le 3 août de cette année sur la rivière Pichuga dans la région de Volgograd, près de l'endroit où il se jette dans le réservoir de Volgograd. C'est notre «terrain d'entraînement» préféré, nous connaissons tous les stands et les éléments de profil en personne.
Fin juillet et début août, le temps est généralement très chaud. Une couche supérieure chauffée apparaît sur les réservoirs (une
thermocline se produit), l'eau commence à fleurir, en général, les conditions deviennent difficiles. Just in such and need to test equipment. Après tout, personne ne s'intéresse aux caractéristiques que vous avez obtenues dans un bassin de mesure parfaitement noyé, tout le monde travaille dans de vrais plans d'eau.
Photo du moment de travail pour l'atmosphère:
 Figure 3 - Directeur technique, concepteur en chef du système USBL, directeur R&D (de gauche à droite) =)
Figure 3 - Directeur technique, concepteur en chef du système USBL, directeur R&D (de gauche à droite) =)Une antenne peut fonctionner avec 23 transpondeurs (bien qu'il soit difficile pour moi d'imaginer une telle tâche, mais quand même). Les balises sont séparées par du code et le travail avec chacune d'elles se fait de manière séquentielle.
L'image suivante montre une capture d'écran de l'hôte (logiciel de contrôle à distance):
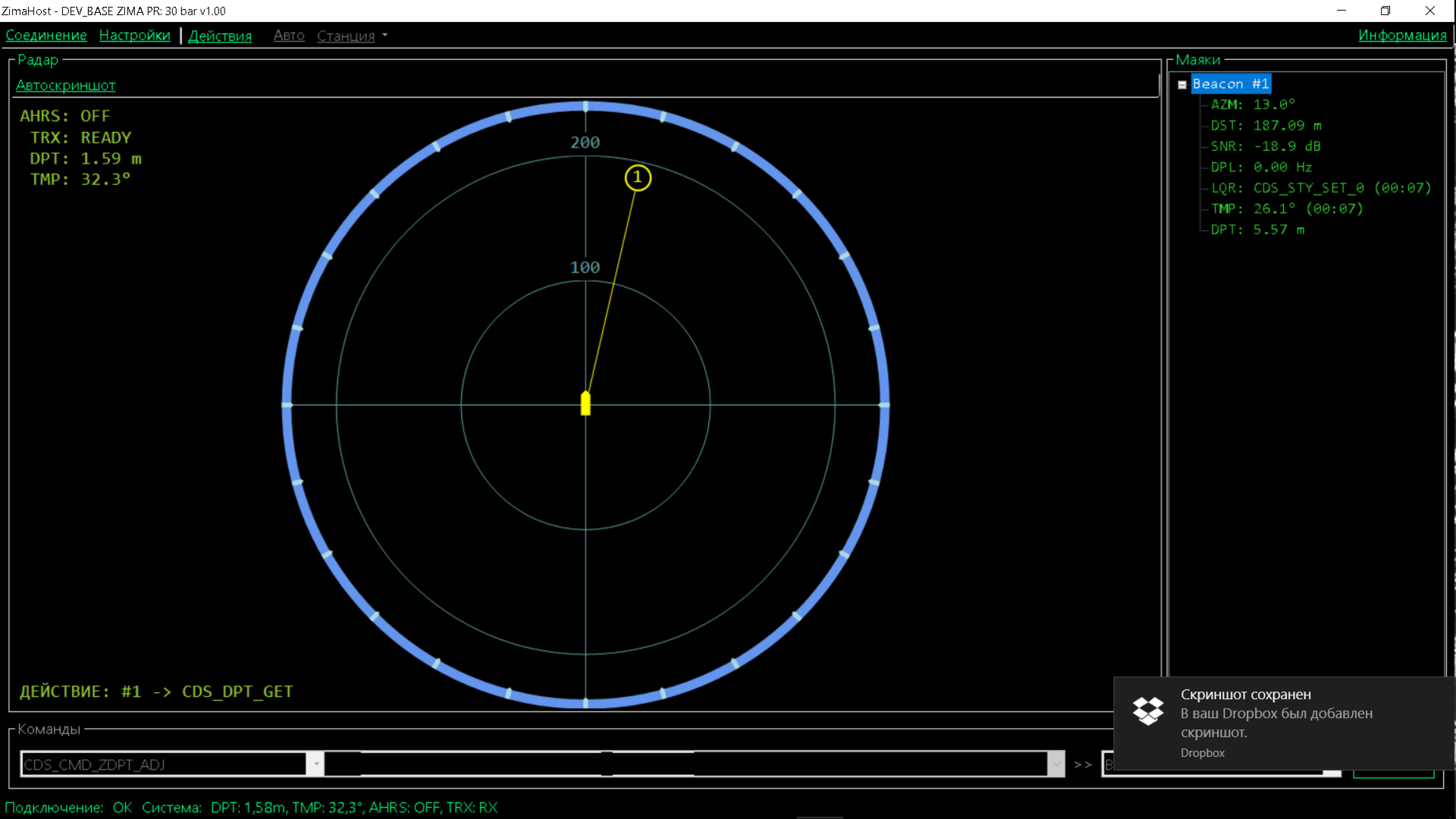
Figure 4 - Capture d'écran de l'hôte Zima USBL
L'antenne est connectée au PC via l'adaptateur UART-USB. Par tradition, nous utilisons le protocole (ouvert) de type NMEA0183 et tous les codes sources des hôtes sont ouverts sur
github .
Veuillez noter: la capture d'écran montre que le phare est situé à une profondeur de 5,5 mètres, la température de l'eau sur son capteur est de 26,1 ° C (!), Et sur l'antenne elle-même, suspendue à un mètre et demi de la surface, elle est de 32,3 ° C (CARL!), À la profondeur de l'endroit dans cette zone est d'environ 15-20 mètres.
À partir des paramètres externes, le système n'a besoin que de la salinité (à partir de laquelle la vitesse du son est déterminée par les lectures de la profondeur et de la température) et de la distance maximale (le temps d'attente maximum pour la réponse de la balise est calculé à partir de celui-ci). Selon notre méthode (pour laquelle un brevet est en instance), le phare peut également déterminer la distance à l'antenne et prend en charge la fonction de réglage à distance de la salinité de l'eau depuis la station de base.
Et enfin, la chose la plus précieuse que nous avons obtenue dans cette expérience (à l'exception du bronzage) est une vidéo de 7 minutes (capture d'écran) de l'hôte:
ZimaHost - vidéoPermettez-moi d'expliquer que le phare était fixe, immobile - tendu entre l'ancre et la bouée, et que l'antenne montée sur la tige était suspendue sur le côté du bateau (en caoutchouc). Relativité des mouvements, pour ainsi dire, en personne: le phare fait un tour d'honneur rapide avec un rayon de plus de 100 mètres, qui est en fait provoqué par la rotation du bateau et, par conséquent, de l'antenne.
Nous avons toujours quelque chose à dire. Si quelque chose vous semblait incompréhensible ou mal divulgué - bienvenue dans le commentaire. Mes collègues et moi allons régler les choses.
PS Dans ces tests, nous avons testé non seulement le système Zima, mais aussi plusieurs autres gadgets intéressants, sur lesquels j'essaierai d'écrire le plus tôt possible.
Vous attend:
- La voix du président après 700 mètres de cyanobactéries
- cas pour appeler les plongeurs
- image d'énigme (maintenant!)
Essayez de deviner à partir de la photo de quel type d'appareil il s'agit et pourquoi il est nécessaire: