La technologie ancienne a inspiré la création d'un futur véhicule tout-terrain capable de fonctionner à 500 ° C pendant des années.
Le temps le plus long que le vaisseau spatial pourrait tenir à la surface de Vénus est de 127 minutes. Le 1er mars 1982, la sonde soviétique
Venus-13 est descendue proprement en parachute et a pu travailler un peu plus de deux heures car tous les composants de l'ordinateur étaient cachés dans un boîtier en titane scellé, préalablement refroidi en orbite. La température à la surface de Vénus est en moyenne de 464 ° C, ce qui est plus élevé qu'à la surface de Mercure (la planète la plus proche du Soleil) et suffisamment chaude pour que l'électronique conventionnelle ne puisse pas fonctionner.
Non seulement la température fait de Vénus un endroit désagréable pour les ordinateurs - la pression à la surface est de 90 atmosphères, ce qui équivaut à la pression à une profondeur de 900 m dans l'océan. Et si vous êtes rassuré que les pluies d'acide sulfurique qui proviennent des parties supérieures de l'atmosphère de Vénus n'atteignent pas la surface, sachez qu'il fait si sombre là-bas (comme le jour le plus nuageux sur Terre) que l'extraction de l'énergie solaire sera extrêmement inefficace.
 Photos de la surface de la sonde soviétique "Vénus-13", descendue à Vénus et y ayant travaillé un peu plus de deux heures
Photos de la surface de la sonde soviétique "Vénus-13", descendue à Vénus et y ayant travaillé un peu plus de deux heuresL'atmosphère étouffante qui rend la surface de Vénus si désagréable fait un travail épouvantable de minimiser la quantité de données de surface que nous pouvons collecter en orbite - il serait donc vraiment très agréable s'il y avait un robot là-bas qui s'occupait de tout pour nous. La plupart des idées liées à l'étude de la surface de Vénus sont dans la même veine que les sondes soviétiques: coller l'électronique à l'intérieur d'un conteneur isolé connecté à un système de climatisation incroyablement puissant et probablement alimenté par un moteur radioactif Stirling avec du plutonium comme carburant . La recherche et le développement d'un tel système coûteront des milliards.
L'approche traditionnelle d'un véhicule tout-terrain pour Vénus est difficile, coûteuse et dangereuse. Mais une équipe d'ingénieurs du Jet Propulsion Laboratory de la NASA, JPL, situé à Pasadena, en Pennsylvanie. La Californie a trouvé une idée innovante pour étudier la surface de Vénus. Si le problème concerne l'électronique, pourquoi ne pas s'en débarrasser et créer un véhicule tout-terrain mécanique?
Grâce au financement du programme NIAC (Advanced Innovation Concepts) de la NASA, l'équipe du JPL souhaite savoir s'il est possible de construire un véhicule tout-terrain pour explorer Vénus sans capteurs, ordinateurs et alimentations traditionnels. Un Automaton Rover pour environnements extrêmes, AREE] pourrait utiliser des engrenages de montre, des ressorts et d'autres mécanismes pour fournir la plupart des fonctionnalités du véhicule, y compris la puissance, le stockage d'énergie, la détection, le mouvement et les communications - sans aucune électronique. Chauffez.
 À l'intérieur de l'indicateur d'emplacement du Globe utilisé sur le vaisseau spatial Voskhod
À l'intérieur de l'indicateur d'emplacement du Globe utilisé sur le vaisseau spatial VoskhodDans un monde électronique surchargé, la plupart d'entre nous ne comprennent pas ce qui peut être fait avec les ordinateurs mécaniques. Il y a deux mille ans, plus ou moins un siècle, les anciens Grecs ont construit le
mécanisme d'Anticythère , capable de calculer la position du Soleil et de la Lune, de montrer les phases de la Lune, de prédire les éclipses, de suivre les cycles du calendrier et probablement de montrer la position de cinq planètes à l'aide d'un ensemble de 30 bronze calibrés avec précision engrenage entraîné par un arbre avec une poignée.
Entre le 17e et le 19e siècle, Blaise Pascal, Gottfried Leibniz et Charles Bebbage ont développé des ordinateurs mécaniques capables de divers calculs arithmétiques. Plus près des temps modernes, dans les années 40, les ordinateurs mécaniques étaient activement utilisés à des fins pratiques difficiles telles que la gestion des tirs d'artillerie et le largage de bombes.
Les Russes ont utilisé l'
ordinateur mécanique Globus pour calculer l'emplacement de leur vaisseau spatial jusqu'en 2002, mais en général, tout se fait maintenant sur l'électronique. Et ça va, mais pas sur Vénus, où l’utilisation de la plupart des appareils électroniques ne sera pas pratique.
Le concept JPL pour AREE est de créer un robot avec un minimum d'électronique et, pour la plupart, s'appuyer sur des systèmes mécaniques qui peuvent fonctionner à des températures élevées pendant des semaines, des mois et même des années sans problèmes. Jonathan Sauder est technologue et ingénieur en mécatronique au sein du groupe d'introduction des technologies au JPL, et chef du projet AREE. Nous avons discuté avec lui pour mieux comprendre comment ce projet a commencé et comment tout fonctionnera.
Comment vous est venue l'idée d'AREE?
Jonathan Sauder: Nous nous sommes assis avec un groupe d'ingénieurs et avons travaillé dans une réunion de développement simultanée. Au cours de l'une des pauses-café, nous avons parlé des mécanismes et des composants sympas, et de la fraîcheur qu'il y aurait à fabriquer un vaisseau spatial entièrement mécanique, à quoi il ressemblerait et où il pourrait être utilisé. Nous avons réalisé qu'il serait utile d'utiliser quelque chose comme ça dans deux endroits où l'électronique ne survivra pas: l'un est Vénus, car le plus long que nous pourrions survivre à la surface de Vénus est de deux heures, et le second est Jupiter, en raison de l'environnement radioactif environnement qui perturbe le fonctionnement de l'électronique.
Est-il possible de construire un robot tout-terrain sans électronique?
Dans la phase I du projet NIAC, nous avons proposé notre idée de construire un véhicule tout-terrain entièrement mécanique qui n'utilise pas du tout d'électricité ou d'électronique, et de remplacer tous les sous-systèmes électroniques standard par des ordinateurs mécaniques. En commençant à étudier ce problème, nous avons réalisé que nous ne pouvons pas construire un véhicule tout-terrain traditionnel comme Curiosity avec un processeur centralisé. Nous devions nous concentrer sur une architecture plus distribuée, dans laquelle, dans un appareil, il existe de nombreux mécanismes simples qui la contrôlent, la signalent et lui indiquent où aller.
Au début, nous voulions effectuer un certain nombre de mesures scientifiques en utilisant la mécanique. Nous avons commencé à traiter ce problème et nous avons réalisé que nous étions incapables de produire des données avec une précision suffisante pour créer des images ou mesurer des paramètres tels que la température et la pression. Il existe différentes options pour l'électronique haute température - à base de carbure de silicium et de gallium - fonctionnant à des températures élevées. Le problème est qu'ils sont très difficiles à intégrer. Il s'est avéré qu'avec leur aide, il est impossible d'organiser un système électrique traditionnel, et rien ne peut être fait qui soit au moins proche des exigences nécessaires à la création d'un véhicule tout-terrain. Par conséquent, nous avons décidé de créer une plate-forme mobile capable de se déplacer, d'explorer de nouveaux endroits et capable de travailler beaucoup plus longtemps que les systèmes existants.
 Premier concept AREE avec jambes
Premier concept AREE avec jambesQu'est-ce qui a commencé le développement d'AREE?
L'objectif principal est de créer l'architecture mobile de la plus haute fiabilité possible. Et déjà le deuxième objectif est d'utiliser autant de mécanismes simples et distribués qui peuvent répondre aux influences extérieures qui peuvent diriger un véhicule tout-terrain le long de la surface de Vénus. Notez que dans les premières images, le véhicule tout-terrain était très similaire au Strandbeest - les «animaux qui marchent» de
Theo Jansen , sculptures cinétiques qui ont marché le long des plages des Pays-Bas. Strandbeest fonctionne avec une paire de capteurs simples qui contrôlent le mouvement des jambes vers l'avant ou vers l'arrière, et une logique intégrée pour éviter le sable mou et l'eau.
Au début du développement du concept, nous avons travaillé directement avec Jansen: il est venu au JPL pour une collaboration de deux jours, et nous avons obtenu de lui l'expérience acquise pendant plus de 30 ans de travail avec Strandbeest. Un de ses premiers conseils a été d'abandonner les jambes. Et, vous savez, lorsque la personne qui a créé Strandbeest vous dit qu'un véhicule tout-terrain sur Vénus n'a pas besoin de jambes, cela signifie que vous devez vraiment trouver autre chose. Le problème clé est que les jambes qui fonctionnent parfaitement sur les plages plates et douces deviennent instables lorsque vous les déplacez vers une surface plus diversifiée, comme un environnement vénusien inconnu, ce qui augmente la probabilité d'un coup d'État et de dommages au véhicule tout-terrain.
En conséquence, notre architecture est passée de la phase I à la phase II, d'un véhicule tout-terrain à l'aspect cool avec des jambes à une version moins cool, mais plus fiable et pratique d'un véhicule tout-terrain qui ressemble à un char de la Première Guerre mondiale.
 Concept de phase II, avec chenilles et éolienne intégrée. Avec un éventuel coup d'État, le véhicule tout-terrain peut encore se déplacer.
Concept de phase II, avec chenilles et éolienne intégrée. Avec un éventuel coup d'État, le véhicule tout-terrain peut encore se déplacer.Pouvez-vous décrire comment AREE peut se déplacer à la surface de Vénus?
Nous développons des systèmes spécialisés pour éviter les obstacles et déterminer la quantité d'énergie nécessaire au mouvement, au lieu du système centralisé habituel qui permet au véhicule tout-terrain d'effectuer plusieurs processus ou de reconfigurer le véhicule tout-terrain à l'aide d'un logiciel.
Nous essayons de simplifier ces mécanismes autant que possible afin que chacun accomplisse sa tâche spécifique, mais l'exécute bien. Peut-être que la collision du véhicule tout-terrain avec l'objet projettera le levier, ce qui le fera reculer un peu, tourner de 90 ° et encore avancer. Nous ne pouvons avoir qu'un seul système d'évitement d'obstacles, mais une telle action peut être répétée plusieurs fois et, par conséquent, elle peut être utilisée pour contourner un obstacle.
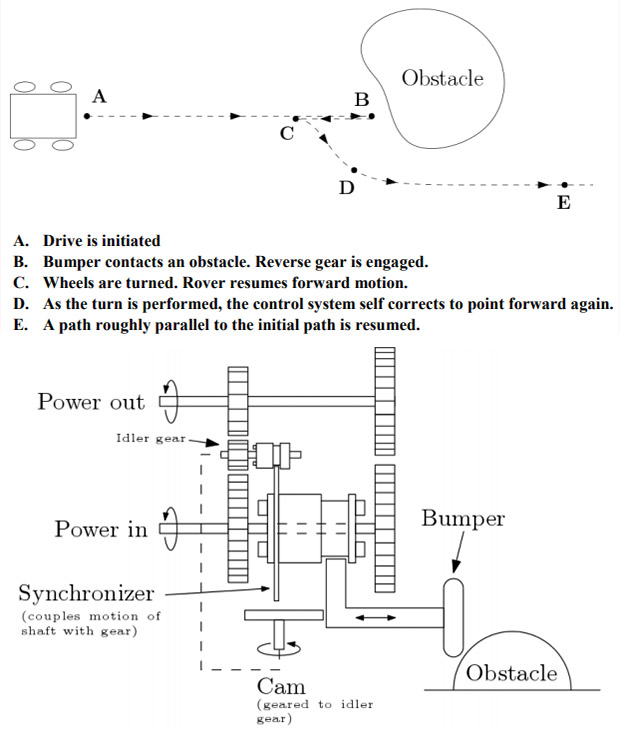
Le système d'évitement d'obstacles utilise un pare-chocs, des engrenages à engrenages et un excentrique. Elle est capable de rétracter le véhicule tout-terrain après avoir reculé, puis de réengager le pare-chocs et de changer de vitesse, et de continuer à avancer. Pendant le mouvement normal vers l'avant, la force est transmise de l'arbre d'entrée via des engrenages sur le côté droit du diagramme à l'arbre de sortie. Les engrenages restants tourneront librement. Face à un obstacle, le synchroniseur engage une marche arrière, ce qui conduit à l'effet inverse. Une fois la came complètement tournée, elle ramènera le pare-chocs en position avant. Le même excentrique peut être utilisé pour faire tourner les roues du véhicule tout-terrain en marche arrière du moteur.
Quelles sont les caractéristiques d'AREE uniques par rapport à d'autres projets de véhicules tout-terrain vénusiens?
Aujourd'hui, il existe plusieurs concepts de missions vénusiennes, dont chacun coûtera un montant comparable à Mars Curiosity, et propose un atterrissage en un ou deux endroits. La plupart des propositions sont très complexes et conçues pour fonctionner de 2 à 24 heures en surface. Nous prévoyons de travailler pendant un mois, et c'est là que notre innovation clé fonctionne - la capacité de sonder de nombreux endroits à la surface de Vénus et de comprendre comment elle change au fil du temps.
Pouvez-vous décrire comment l'aire parfaite répondra à vos attentes?
Un robot idéal sera en mesure de travailler sur les surfaces les plus difficiles de Vénus, appelées
tessers , qui sont de la lave grossière et pierreuse, en plus semblable au parquet ou à la tuile. Notre objectif est de conduire un véhicule tout-terrain sur une telle surface, de prélever des échantillons géologiques qui contribueront à notre compréhension de l'évolution de Vénus. Un véhicule tout-terrain idéal devrait mesurer un peu plus de 1,5 m - maintenant cette restriction est imposée par un bouclier thermique. Si nous le pouvions, nous l'augmenterions à 2,5 m afin qu'il puisse surmonter de plus gros obstacles et recevoir plus d'énergie du vent.
En conséquence, vous devez fabriquer un véhicule tout-terrain capable de surmonter la plupart des obstacles, qui ramperaient et ramperaient vers l'avant, lentement mais sûrement, pour collecter des échantillons et des données météorologiques.
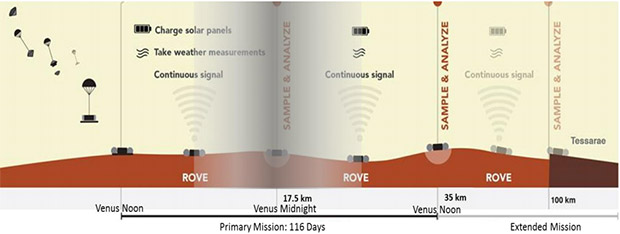 Le concept de voyager à travers les plaines vers tesser. Pendant la partie principale de la mission, qui dure 116 jours terrestres (un cycle quotidien vénusien), le véhicule tout-terrain couvrira 35 km. La mission élargie lui permettra de parcourir une distance allant jusqu'à 100 km en trois ans.
Le concept de voyager à travers les plaines vers tesser. Pendant la partie principale de la mission, qui dure 116 jours terrestres (un cycle quotidien vénusien), le véhicule tout-terrain couvrira 35 km. La mission élargie lui permettra de parcourir une distance allant jusqu'à 100 km en trois ans.* * *
À ce stade, vous pouvez déjà commencer à vous demander - pourquoi enverrions-nous un véhicule tout-terrain groovy pour étudier la surface de Vénus si nous ne pouvons pas obtenir de nouvelles de lui - parce que sans électronique, comment peut-il nous envoyer des données? Il existe des moyens de stocker mécaniquement des données - il est assez facile de stocker temporairement des numéros, et environ 1 mégaoctet de données peut être entré sur un phonographe en métal. Et ensuite?
L'une des idées, pas aussi folle qu'il y paraît à première vue, est d'utiliser des boules d'hydrogène pour soulever des disques métalliques dans la haute atmosphère de Vénus, où ils seront interceptés par un drone solaire à haute altitude, les lire et transférer leur contenu vers un satellite situé sur orbite. Les chercheurs envisagent également l'option d'une radio avec des tubes électroniques, mais bien que ces tubes soient capables de fonctionner à des températures élevées, ils seront vulnérables dans l'atmosphère vénusienne et feront face à une perte d'étanchéité.
Mais les développeurs d'AREE ont eu une autre idée: les réflecteurs radar. Un réflecteur radar monté sur un véhicule tout-terrain peut être vu depuis l'orbite, et en plaçant un obturateur devant le réflecteur, il sera possible de transmettre environ 1000 bits d'informations à chaque passage de satellite. En ajoutant plusieurs réflecteurs avec une réflectivité différente, ainsi que des volets fonctionnant à différentes fréquences, vous pouvez transférer jusqu'à 32 variables uniques par jour. De plus, dans certains cas, il ne sera même pas possible de transmettre certains nombres - par exemple, en plaçant un ventilateur devant le réflecteur, il sera possible de mesurer la vitesse du vent à différents endroits de la surface.
Maintenant, après avoir créé un tel véhicule tout-terrain qui est unique en termes de capacités et de fiabilité, capable de survivre sur Vénus, vous devez comprendre quel type de recherche scientifique il peut effectuer - et c'est une question particulièrement difficile pour AREE, comme expliqué dans la proposition de la phase I du concours NIAC:
L'un des principaux points faibles d'un système purement mécanique est le potentiel de recherche scientifique. Outre les communications, les instruments scientifiques constituent un domaine clé où l'électronique à haute température serait utile. Des mesures plus complexes, notamment géologiques, nécessitent des solutions électroniques.
À la fin de l'année dernière, la NASA a annoncé le programme HOTTech, un programme de technologie à haute température qui finance «une technologie de pointe pour les études automatisées des environnements à haute température où les températures approchent ou dépassent 500 degrés Celsius». AREE espère que grâce à HOTTech, il y aura des outils scientifiques qui pourront survivre sur leur véhicule tout-terrain - mais pour un résultat différent, ils ont des idées intéressantes pour faire de la science sans électronique. Par exemple, mesurer la vitesse du vent à l'aide d'une turbine, la température et la pression à l'aide de matériaux s'écartant de la température et les propriétés chimiques à l'aide de tiges qui répondent à certains composés chimiques.
 L'énergie éolienne est stockée dans un ressort composite. Le système mécanique du diagramme est capable de mesurer l'énergie stockée dans le ressort et utilise l'embrayage pour transférer de l'énergie au système de mouvement lorsqu'elle est suffisamment accumulée. Si vous souhaitez que le véhicule tout-terrain se déplace après un certain temps ou lorsque vous atteignez d'autres conditions, vous pouvez ajouter des portes logiques mécaniques qui répondent aux montres ou à d'autres capteurs.
L'énergie éolienne est stockée dans un ressort composite. Le système mécanique du diagramme est capable de mesurer l'énergie stockée dans le ressort et utilise l'embrayage pour transférer de l'énergie au système de mouvement lorsqu'elle est suffisamment accumulée. Si vous souhaitez que le véhicule tout-terrain se déplace après un certain temps ou lorsque vous atteignez d'autres conditions, vous pouvez ajouter des portes logiques mécaniques qui répondent aux montres ou à d'autres capteurs.Sauder et l'équipe n'essaient pas de créer toutes ces mécaniques juste pour le plaisir. Explorer Vénus sur un intervalle de plus d'un jour ou deux est une tâche vraiment importante. "Notre objectif n'est pas de reproduire ce qui a déjà été fait, ou deviendra bientôt possible dans le domaine de l'électronique haute température", explique Sauder, "mais de créer un ensemble de solutions mécaniques pour les domaines où il n'y a pas encore de solutions claires."
La technologie développée dans le cadre du projet AREE peut être utile dans d'autres endroits du système solaire - et pas seulement dans des endroits à haut niveau de rayonnement, comme l'Europe, l'une des lunes de Jupiter. Ici sur Terre, AREE peut être utile pour collecter des échantillons à proximité d'un volcan actif ou dans des zones à fort rayonnement. Un autre avantage d'AREE est qu'il peut être entièrement stérilisé à haute température sans compromettre complètement la fonctionnalité. Par exemple, s'il y a un lac avec une forme de vie inhabituelle sous la calotte polaire de Mars, vous pouvez envoyer une ZONE stérile pour prélever des échantillons et ne pas vous soucier de la pollution.
AREE a maintenant reçu un financement pour la deuxième phase du CANI. L'équipe travaille sur un développement plus détaillé du système de mouvement, qui devrait conduire au remplacement des chenilles par certaines roues, ce qui est plus fiable. Ils développent également des montres mécaniques qui peuvent fonctionner à des températures élevées - l'une des principales parties d'un ordinateur mécanique autonome. Sauder dit qu'ils attendent des résultats intéressants de la construction et des tests d'un système de transmission de signaux radar tout au long de l'année. Nous sommes également très intéressés par cela - c'est l'un des robots les plus innovants que nous ayons vus, et nous avons hâte de voir comment cela se passe sur Vénus.
L'équipe AREE dirigée par SREE comprend également Evan Hilgeman, Michael Johnson, Aaron Parnes, Bernie Bienstock et Jeffrey Hall [Evan Hilgemann, Michael Johnson, Aaron Parness, Bernie Bienstock, Jeffery Hall]. Jessie Kawata et Kathryn Stack sont d'autres auteurs du rapport final de la phase I.