NAP * - Périphérique indépendant de base
Articles précédents sur Core Independent Peripherals Microcontrôleurs dans les alimentations à découpage
3e partie
Les sections précédentes ( partie 1 , partie 2 ) ont expliqué comment les périphériques de microcontrôleur à micropuce indépendants du cœur vous permettent de créer des contrôleurs PWM de commutation d'alimentation à partir de "briques" en établissant des connexions entre différents modules périphériques. Si nous ajoutons de nouvelles «briques» aux contrôleurs PWM décrits ci-dessus, nous obtiendrons de nouvelles fonctions. Considérez ce qui peut être fait d'autre.
Automatisation des fonctionnalités
Protection du bloc d'alimentation
Un problème important dans l'électronique de puissance est la fourniture de fonctions de protection. Si la rétroaction est rompue, il peut y avoir des situations où l'interrupteur d'alimentation sera ouvert pendant une durée non valide.
Les microcontrôleurs PIC avec des périphériques indépendants du cœur (CIP) ont un temporisateur avec une fonction de limite (Hardware Limit Timer, HLT).
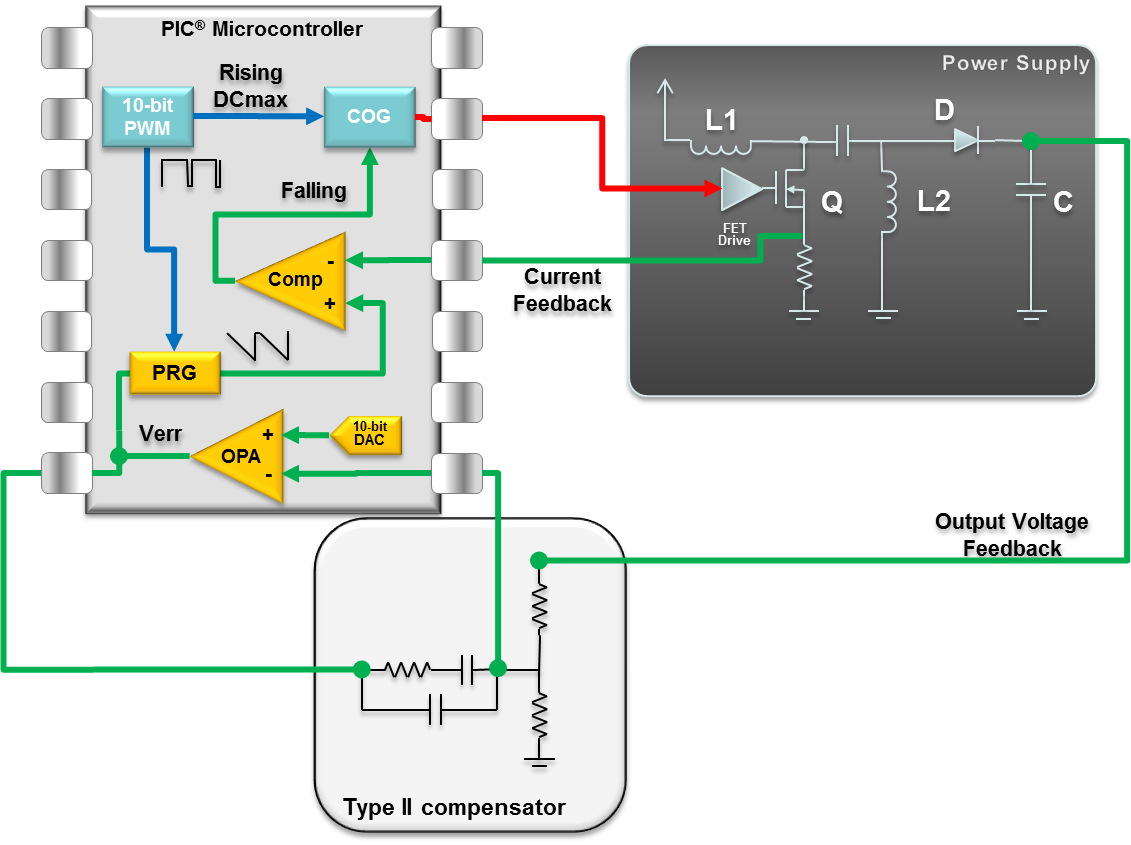
Prenons un exemple de mise en œuvre d'un contrôleur PWM avec protection automatique (limitation de la largeur de l'impulsion de sortie et possibilité de mise hors tension automatique).

Fig. 3.1. Contrôleur PWM
Minuterie HLT1 - définit la limite de temps pour l'état ouvert du MOSFET; minuterie HLT2 - définit la durée pour l'état désactivé de Toff.
COG - Générateur de sortie complémentaire - génère des signaux de commande MOSFET.
Algorithme (initialisation de la périphérie du microcontrôleur):
- Le temporisateur HLT2 initie l'inclusion de COG (c'est-à-dire, MOSFET de puissance) et armé HLT1. Le courant traversant l'inductance et la tension augmente. Lorsque la tension coïncide avec Vref, le comparateur est déclenché.
- En mode normal, le comparateur réinitialise COG, en même temps que COG, HLT2 (Toff) est réinitialisé.
- Le signal du comparateur est masqué pendant un certain temps lorsque l'interrupteur d'alimentation est commuté, empêchant ainsi les fausses alarmes qui peuvent résulter d'interférences (sur la figure 3.1, le signal de suppression est configuré pour plus de clarté sur le comparateur, en fait, la fonction de suppression est une caractéristique du module COG, elle ne le fait pas reçoit le signal du comparateur).
La figure 3.2 explique le fonctionnement d'un tel contrôleur PWM.
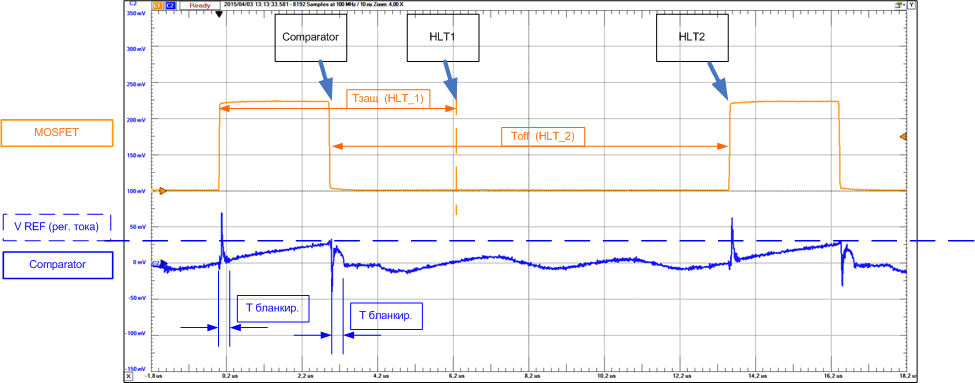
Graphique 3.2. Diagrammes de tension expliquant le fonctionnement du contrôleur PWM (Fig. 3.1).
Si le comparateur ne fonctionne pas pendant le temps de sécurité Tzt., Le temporisateur de limite HLT1 réinitialise le COG et limite le temps d'ouverture de l'interrupteur d'alimentation. Un temps d'ouverture plus long pour la clé peut signifier un retour ouvert, un dysfonctionnement du transistor de puissance ou une inductance.
Le module COG a une fonction pour bloquer le fonctionnement, auquel cas le programme peut le déverrouiller. Cela peut être utilisé pour les diagnostics - si HLT1 est constamment déclenché, le programme peut éteindre le contrôleur PWM et signaler un dysfonctionnement.
Démarrage en douceur
Si l'énergie reste dans l'inductance pendant la période PWM, alors sur plusieurs périodes, cela peut conduire à sa saturation. En même temps, au début de la source, la tension de sortie est nulle et le retour de tension ne fonctionne pas encore. C'est-à-dire des conditions sont créées pour saturer l'inductance de puissance.
Un démarrage progressif de la commande de tension peut être obtenu en augmentant l'inductance ou en formant un faible rapport cyclique au démarrage avec une nouvelle augmentation du rapport cyclique.
Le démarrage progressif dans le contrôle du courant peut être réalisé en limitant le courant de la boucle de rétroaction lors du démarrage de la source.
Exemple: démarrage progressif avec limitation de courant maximum. Le DAC et le comparateur C2 limitent le courant de crête minimum; la tension du DAC augmente lentement par programme. Lorsque Vout atteint la norme, le comparateur C1 commence à fonctionner, par interruption duquel vous pouvez déconnecter le circuit de démarrage progressif et la limite de courant (DAC + Comp2).

Fig.3.3. Contrôleur PWM avec fonction de démarrage progressif.
Protection contre les surtensions
L'ajout d'un comparateur C2 pour analyser la tension de sortie aidera à éteindre le module COG lorsque la tension de sortie augmente au-dessus du seuil de surtension (protection contre les circuits ouverts dans la charge, voir fig. 3.4).
| Contrôleur sans protection | Contrôleur de surtension de sortie |
|---|
 |  |
Figure 3.4
De même, il est possible d'organiser une protection contre les températures excessives, etc.
Limitation maximale du cycle de service
Auparavant, la mise en œuvre d'une telle fonction était envisagée dans les contrôleurs PWM avec contrôle de tension, pour l'option de mise en œuvre, voir Fig. 3.1.
Dans les contrôleurs avec contrôle de courant en mode normal, la sortie PWM est déclenchée par l'avant de l'entrée PWM (référence) et est réinitialisée à partir du signal de retour - le comparateur de courant. Pour limiter le rapport cyclique des impulsions de sortie, un PWM de référence peut être utilisé, dont le rapport cyclique est sélectionné comme maximum, pour la topologie IPS développée. Ensuite, lors du déclin du PWM de référence, il est possible de réinitialiser de force le module COG (voir Fig. 3.5).

Graphique 3.5. Contrôleur PWM avec des impulsions de sortie à rapport cyclique limité.
Accès aux signaux internes et aux diagnostics
Alors que le périphérique indépendant du noyau forme le contrôleur PWM de l'alimentation à découpage et ferme le retour de la boucle de commande, le cœur du microcontrôleur permet des fonctions de mesure, de diagnostic et de communication. Le microcontrôleur est capable de mesurer le courant de crête et le courant moyen par inductance, un signal de compensation en dents de scie. Associé à la mesure des paramètres temporels, cela permet au cœur du microcontrôleur d'effectuer des calculs mathématiques et d'obtenir des informations qui ne sont pas disponibles par des mesures directes.
En utilisant la tension d'erreur mesurée Verr, PRG et IL_min, les courants ILpeak et IL_avg peuvent être calculés.
La mesure du cycle de service et la connaissance IL_avg permettent de calculer Iin_avg et Iout_avg. En utilisant Vin, Vout, Iin_avg, Iout_avg, vous pouvez évaluer la puissance et l'efficacité de la source d'alimentation.
Les interfaces de communication permettent un contrôle externe, un transfert de données et des informations de diagnostic. Les ressources logicielles vous permettent d'implémenter des piles de protocoles de communication.
À titre d'exemple, le microcontrôleur peut être utilisé dans des systèmes de production d'énergie à partir de sources alternatives avec des batteries de stockage sans utiliser de micropuces spécialisées pour les convertisseurs d'énergie. Pour ce type d'application, la conversion d'énergie et la charge de la batterie sont contrôlées par un microcontrôleur. Les fonctions de recherche du point d'énergie maximale (MPPT) dans les convertisseurs solaires et les protocoles de communication sont implémentées dans le logiciel. L'interface d'interaction utilisateur est implémentée via les ports d'entrée / sortie du microcontrôleur. Ainsi, de nombreuses fonctions d'un tel système peuvent être implémentées sur un seul microcontrôleur (voir Fig. 3.6), et ne pas utiliser plusieurs microcircuits et MK.

Graphique 3.6.
Indépendant des périphériques centraux, vous pouvez effectuer un certain nombre d'autres fonctions: limiter le courant ou éteindre la source pendant une surchauffe, changer le mode de fonctionnement avec un courant intermittent en courant continu, etc. (maculage) du spectre d'interférence de la source.
La mise en œuvre de contrôleurs PWM sur la périphérie MK indépendante du cœur pour la mise en œuvre d'un IIP à un étage ou à un canal a été discutée ci-dessus.
Les familles de microcontrôleurs PIC16F176x / 177x ont jusqu'à 4 ensembles périphériques du même type, chacun pouvant être utilisé dans la construction d'un convertisseur d'énergie. Ainsi, les contrôleurs de ces familles peuvent être au cœur des convertisseurs IIP et d'énergie multicanaux ou à plusieurs étages.
Programme de microcontrôleur
Un IIP avec implémentation sur un périphérique indépendant du coeur ne nécessite pratiquement pas d'intervention du coeur du microcontrôleur. La tâche du microcontrôleur est réduite à la configuration initiale de la périphérie, après quoi les fonctions / modules fonctionnent de manière autonome par des signaux de rétroaction. Le contrôleur peut nécessiter une participation minimale au traitement et à la modification de l'algorithme d'interaction périphérique, par exemple, pendant un démarrage en douceur, la modification des paramètres de sortie de la source, l'élaboration de conditions d'urgence, etc.
Par conséquent, le cœur et le programme du microcontrôleur peuvent effectuer un certain nombre de leurs fonctions inhérentes - contrôle, fournissant une interface avec l'équipement de contrôle, indication des modes, etc.
Sur le site Web de Microchip, vous pouvez trouver la mise en œuvre des interfaces PMbus, DALI, DMX, qui sont largement utilisées dans divers systèmes avec convertisseurs d'énergie.
Débogage
Pour déboguer le système, il n'est pas nécessaire de commencer par la disposition de l'unité d'alimentation. Pour certaines tâches, les ressources et les périphériques du MC permettent de former à la fois la logique de commande du convertisseur et d'émuler les signaux de retour de la topologie du convertisseur de sortie.
| topologie | régime |
|---|
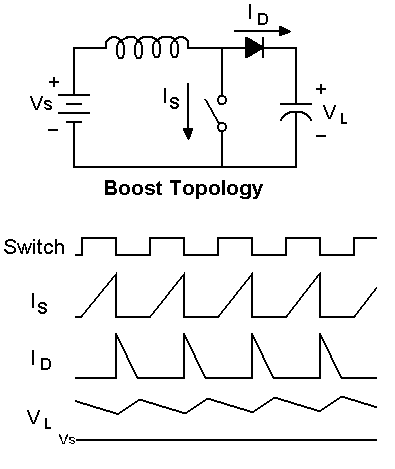 | 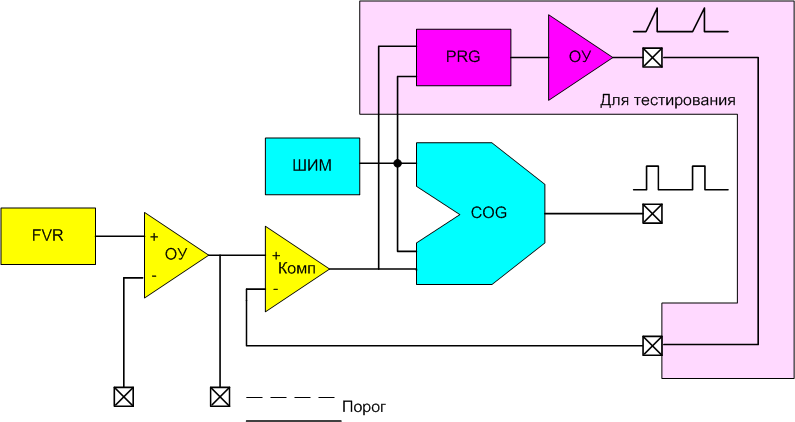 |
Figure 3.7. Un exemple de la formation d'un signal en dents de scie pour le débogage d'un contrôleur PWM avec mesure de la valeur de courant de crête.
| régime | graphique |
|---|
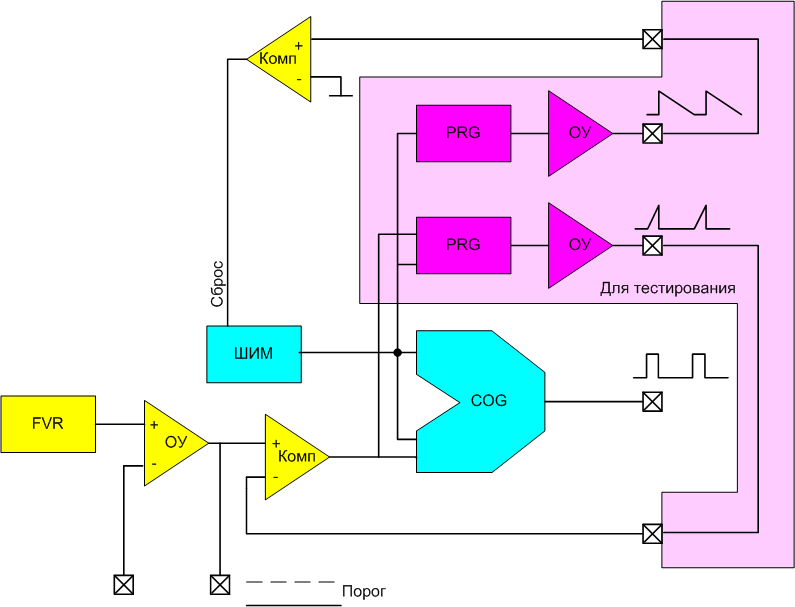 |  |
Graphique 3.8. Un exemple de la formation de signaux en dents de scie pour déboguer un contrôleur PWM avec mesurer la valeur de crête du courant et détecter le courant nul dans l'inductance.
Résumé
La possibilité de configurer les périphériques de manière flexible permet d'utiliser le même MC d'application générale dans diverses tâches, y compris la création de contrôleurs PWM pour les convertisseurs d'énergie.
Les périphériques indépendants du noyau sont intéressants en eux-mêmes, mais le plus grand avantage peut provenir de la possibilité de synthèse de blocs fonctionnels, c'est-à-dire partage de plusieurs modules périphériques pour résoudre des problèmes spécifiques. Dans ce cas, la vitesse d'horloge, la vitesse et la profondeur de bits du cœur passent à côté - la partie matérielle exécute des fonctions spécialisées et le noyau est engagé dans le support logiciel du produit.
La littérature utilisée et recommandée pour l'étude:
- Site Web de Microchip: http://www.microchip.com/promo/dspic33-gs-digital-power
- Cellules logiques configurables dans les microcontrôleurs PIC https://geektimes.ru/post/278718/
- Ports d'E / S du microcontrôleur Microchip. https://geektimes.ru/post/279374/
- TB3119. Fiche technique du générateur de sortie complémentaire. www.microchip.com
- Dynamique et contrôle des systèmes électroniques commutés. Chapitre 2. Modulation de largeur d'impulsion http://www.springer.com/978-1-4471-2884-7
- TB3155. Contrôleur PWM entrelacé multiphasé avec émulation de diode utilisant des microcontrôleurs PIC 8 bits. www.microchip.com
- TB3153. Exemples de fonctions implémentées avec le générateur de rampe programmable. www.microchip.com
- Keith Billings, Taylor Morey. MANUEL D'ALIMENTATION ÉLECTRIQUE SWITCHMODE
- Marty Brown. Livre de recettes d'alimentation.
- AN2122. Flyback SMPS utilisant un microcontrôleur comme unité de contrôle. http://www.microchip.com
- 20097 PC7. Conception de convertisseurs de puissance intelligents à l'aide de périphériques indépendants du noyau (CIP)
Formation Microchip MASTERs 2016. - AN2456. Configurabilité dans un contrôleur d'alimentation à découpage. http://www.microchip.com