La science-fiction regorge de robots volants. Il existe également des robots humanoïdes volants créés à l'image de l'homme. Ce sont des machines autonomes et des exosquelettes, qui sont contrôlés de l'intérieur, comme Iron Man. Mais en réalité, nous n'avons pas encore vu de tels robots. Il existe des multicoptères, mais ils ne peuvent pas marcher sur le sol, comme une personne. Les ingénieurs de l'Institut italien de technologie ont décidé de corriger cette lacune - ils ont développé l'
architecture du robot humanoïde volant iCub avec quatre réacteurs et un système de contrôle pour celui-ci.
Il s'agit de l'un des premiers robots au monde capable de voler, de marcher et de manipuler des objets, c'est-à-dire de les capturer avec des manipulateurs.
Les robots humanoïdes sont traditionnellement considérés comme des machines terrestres qui se déplacent à la surface. Mais les scientifiques italiens sont sûrs que si vous ajoutez des moteurs à réaction à un tel robot, la portée de son utilisation s'élargira considérablement, car il aura plus de degrés de liberté. Par rapport aux véhicules aériens sans pilote traditionnels, ils sont également parfois équipés de manipulateurs qui peuvent capturer des objets, mais encore une fois, un robot humanoïde a un avantage sur eux, car il peut marcher sur le sol. Cela augmente la fiabilité et l'efficacité énergétique du système.
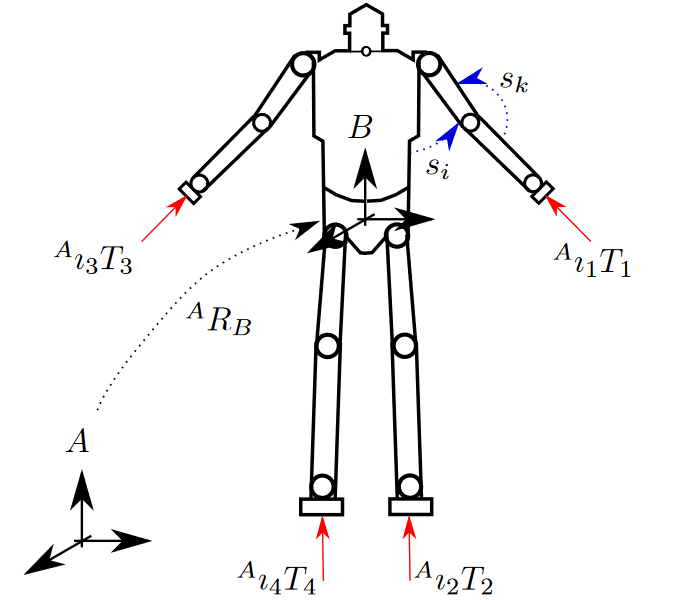
Dans le projet de l'Institut italien de technologie, quatre réacteurs sont installés sur les effecteurs terminaux, c'est-à-dire les "bras" et les "jambes" du robot. Cette disposition des moteurs semble un peu contre nature, mais en fait, un tel circuit multimodal a déjà été testé dans d'autres conceptions. Les ingénieurs disent qu'il permet de stabiliser la trajectoire calculée par rapport au centre de masse, en tenant compte des petites déviations dans l'orientation du châssis de support du robot.
Le développement italien est loin d'être concrètement mis en œuvre. Les développeurs l'appellent «la première étape pour créer des robots humanoïdes volants» et ce n'est vraiment que la première étape. Ce que les ingénieurs ont fait était de développer un cadre de base pour contrôler la
simulation du robot iCub lors d'un vol stationnaire dans l'air et d'un mouvement fluide. La poussée du moteur est également calculée dans le programme de simulation et prise en compte dans le calcul du système de commande. Ce travail prouve que la création d'un tel robot et sa commande sont
théoriquement possibles, bien que les développeurs n'aient pas pris en compte les effets aérodynamiques et autres facteurs qui peuvent se manifester dans le fonctionnement pratique du robot. Tout aura son temps - ces calculs et les premières expériences avec des vols réels seront plus tard, mais maintenant la tâche était de s'assurer qu'il était théoriquement possible de contrôler le mouvement d'un tel mécanisme dans l'air.
La vidéo montre comment le robot se fige en un seul endroit et calcule également la trajectoire souhaitée pour son centre de masse.
L'un des développeurs d'iCub, Daniele Pucci, a déclaré à
IEEE Spectrum qu'il avait eu l'idée de créer un tel robot il y a quatre ans lorsqu'il a rejoint l'Institut italien de technologie. Il a ensuite réfléchi à la manière d'appliquer ses développements dans le domaine du contrôle des drones à des robots avec différentes "parties du corps", c'est-à-dire pas un corps complètement rigide.
Daniele Pucci estime que les robots volants de type humanoïde présentent de nombreux avantages par rapport aux multicoptères conventionnels équipés de manipulateurs robotiques. Ces derniers rencontrent souvent des problèmes par temps venteux, car ils ne peuvent pas se tenir fermement au sol, et nécessitent donc un contrôle plus précis lorsqu'ils tentent de capturer un objet stationnaire. De plus, le robot humanoïde a deux manipulateurs, et non un, ce qui simplifie encore la tâche.
Un autre avantage est social. À l'avenir, de tels robots pourront en effet être utilisés comme exosquelettes pour l'homme, à l'image d'Iron Man. L'exemple de
Richard Browning tirant un exosquelette montre que de telles inventions seront demandées - en fait, lequel d'entre nous ne veut pas voler dans une caisse en fer avec des moteurs à réaction?
 Richard Browning a plané à un mètre du sol
Richard Browning a plané à un mètre du solL'article scientifique a été
publié le 16 février 2017 sur le site de préimpression arXiv.org (arXiv: 1702.06075) et soumis pour publication dans la revue
IEEE Robotics and Automation Letters .