
Plus tôt dans nos publications, nous avons
soulevé à plusieurs reprises
le sujet de l'utilisation des quadrocoptères dans les télécommunications. Plusieurs
études de cas sur ce sujet ont été publiées sur notre blog.
Cependant, aujourd'hui, nous nous concentrerons sur l'utilisation de copters dans l'organisation des réseaux sans fil. Cela a été dit plus d'une fois et je me souviens que Facebook allait distribuer Internet à travers la planète à l'aide de drones. Ils prévoyaient également d'utiliser des drones au sein du ministère des Urgences, par exemple, pour organiser une couverture radio à court terme tout en organisant diverses opérations de sauvetage ou d'autres événements. En général, dans toutes les situations où le déploiement rapide de réseaux sans fil est nécessaire.
Dans ce document, je voudrais présenter une
étude d' experts étrangers, qui démontre clairement les résultats d'une expérience avec un drone servant de point d'accès.
À propos de la méthodologie et des fonctionnalités des dispositifs d'expérimentation
La carte Intel Galileo a été utilisée comme élément principal du système. La carte est basée sur le processeur Intel Quark SoC x 1000 32 bits avec une fréquence d'horloge de 400 MHz. Le logiciel utilisé était Linux quark 3.19.8 yocto-standard. La source d'alimentation est une batterie de 10400 mAh, capable de fournir à Galileo jusqu'à 15 heures d'autonomie. Une carte Intel Dual Band Wireless-AC 7260 a été connectée à la carte Galileo via le port PCI Express. La carte est capable de fournir des taux de transfert de données allant jusqu'à 867 Mbit / s. Il fonctionne sur plusieurs normes Wi-Fi (802.11a / b / g / n / ac). Deux antennes externes avec un gain de 5 dBi ont été connectées à la carte. Le poids total de la carte Galileo, de la batterie et de l'ensemble de l'antenne était de 340 grammes.
La première étape de l'expérience a été d'étudier les capacités théoriques de couvrir un drone. Le calcul a été effectué en utilisant les modèles de propagation radioélectrique: "Free Space" et le modèle "Wireless Initiative New Radio" - WINNER D1.
À l'aide de ces modèles, les plages de propagation maximales estimées pour la liaison montante et la liaison descendante de plusieurs versions du Wi-Fi ont été calculées. De plus, nous avons mesuré les performances de la carte Galileo en tant que nœud intermédiaire d'un réseau Wi-Fi.
L'expérience était basée sur deux modes de fonctionnement des points d'accès sans fil. Le premier - «Infrastructure» - est implémenté dans la plupart des réseaux Wi-Fi commerciaux. Dans ce mode, le point d'accès est le nœud de communication central connectant les périphériques sur le réseau et servant de passerelle vers Internet. Dans ce mode, le point d'accès prend en charge toutes les tâches de gestion du réseau.
Le deuxième mode est Ad-Hoc. Il n'est pas moins courant et est un réseau maillé, où aucun des points d'accès n'est central. Tous les nœuds sont égaux et chacun assume les tâches d'un hôte ou d'un routeur. Les nœuds ad hoc peuvent se déplacer pour former un réseau dit mobile (Mobile Ad-hoc NETwork - MANET). L'avantage de ce mode est que la connexion entre les nœuds peut être modifiée dynamiquement lors du déplacement des appareils. Mais le fonctionnement efficace d'un tel réseau peut dépendre fortement des algorithmes de routage chargés de délivrer un paquet entre les nœuds du réseau. En raison de la nature dynamique de la topologie du réseau, le «coût» du chemin entre les nœuds doit être recalculé périodiquement pour trouver les meilleurs chemins.
Pour les tests, deux appareils supplémentaires ont été connectés au réseau. Les nœuds du réseau étaient deux ordinateurs portables avec OS Linux Ubuntu et carte Wi-Fi IEEE 802.11 a / b / g / n. Un ordinateur portable avec une carte sans fil Intel Centrino Advance-N 6230 a été installé du côté de la réception, et un ordinateur portable avec une carte Intel Dual Band 3160 a été installé de l'autre côté. La carte Intel Galileo, qui fonctionne en mode AP (mode infrastructure), ou comme l'un des nœuds intermédiaires (Ad-Hoc) entre l'émetteur et le récepteur. Dans le dernier appareil, le protocole de routage BATMAN a été utilisé, ce qui a fait ses preuves. Les métriques du réseau ont été obtenues en utilisant iPerf3. Dans cette expérience, la transmission à vitesse constante entre les nœuds du réseau avec les paramètres suivants a été utilisée: durée de transmission - 30 sec; taux de transfert: 1, 3, 5, 7, 9, 11 Mbps; taille de paquet: 512 et 1024 octets.
Les paramètres d'un réseau aérien réel ont été mesurés selon le schéma suivant:
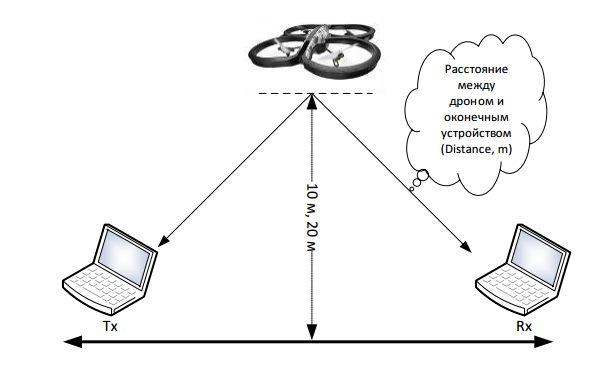
Les deux terminaux s'éloignaient progressivement l'un de l'autre le long de l'axe X. Aux points, la bande passante du réseau a été mesurée à l'aide d'un analyseur de réseau iPerf3 et le niveau de signal maximal a été mesuré à l'aide d'un analyseur de spectre Rohde & Schwarz FSH3. Le quadcopter était suspendu à une hauteur de 10 et 20 mètres, sur lequel des mesures ont été effectuées. Le drone avait donc l'air:

Rayon d'action
Comme nous l'avons noté dans l'expérience, la portée de communication a été mesurée et la couverture calculée selon les modèles de propagation des ondes radio «Free Space» et le modèle WINNER D1. La formule Friis est utilisée lorsqu'il est nécessaire de calculer la longueur du signal radio entre l'émetteur et les récepteurs en l'absence d'obstacles entre eux.
Ce modèle est utilisé uniquement lors du calcul des champs dans la zone éloignée, le calcul est effectué selon la formule:

Le WINNER D1 est un modèle stochastique. Il prend en compte les pertes dans le canal sans fil. Il est déterminé par la formule:

Dans ce document, les variables de lettres indéfinies ont les valeurs suivantes A = 21,5, B = 44,2 et C = 20.
Dans les calculs, la puissance d'émission pour la liaison montante et la liaison descendante était supposée être de 20 dBm (100 mW). Le calcul de la plage de communication a été effectué pour différentes versions des normes IEEE 802.11. Le tableau ci-dessous montre les résultats des calculs pour la liaison descendante (liaison descendante) et pour la liaison montante (liaison montante). Dans les calculs, on a supposé que l'UAV se trouvait à une altitude de 10 m.
Dans une expérience réelle, le niveau du signal reçu a été estimé. La figure ci-dessous montre le niveau du signal en fonction de la distance pour le mode de fonctionnement de l'infrastructure (à gauche) et le mode Ad-hoc (à droite) lorsque l'avion fonctionne à une altitude de 10 mètres.

Les mêmes données expérimentales mais pour le fonctionnement du drone à une hauteur de 20 mètres:
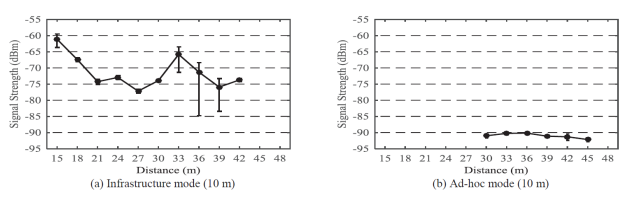
Les résultats montrent une différence notable entre les valeurs théoriques et pratiques. Ils sont causés par de nombreux facteurs supplémentaires. Cependant, en général, le niveau du signal reçu est beaucoup plus élevé que le signal reçu dans l'Ad-hoc. Les figures b et d montrent moins de points de contrôle mesurés, car seules les mesures ont été enregistrées qui ont été obtenues lorsque l'UAV fonctionnait comme point intermédiaire entre deux appareils terminaux. Les résultats obtenus en connectant directement l'émetteur et le récepteur de l'ordinateur portable n'ont pas été pris en compte. En d'autres termes, lorsque la distance entre les points d'extrémité était inférieure à 60 mètres (pour une hauteur de drone de 10 mètres) ou à 80 mètres (pour une hauteur de 20 mètres), le quadcopter n'agissait pas comme un appareil intermédiaire en mode Ad-hoc.
Débit de données
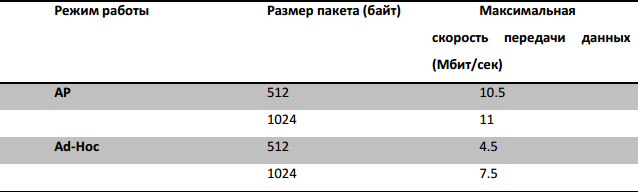
Pour évaluer les performances du mode de fonctionnement infrastructurel et du mode Ad-hoc en termes de débit maximal, iPerf a été utilisé pour exécuter des paquets entre les points de terminaison. Les premières mesures ont été réalisées en laboratoire. Vitesse mesurée dans plusieurs modes de fonctionnement et paquets de 512 et 1024 octets.
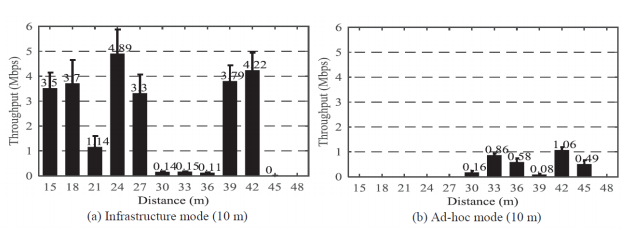
Les mesures suivantes ont été effectuées en conditions réelles. La vitesse de l'infrastructure est supérieure à la vitesse du réseau Ad-hoc.
Pour le mode de fonctionnement infrastructurel (à gauche) et le mode Ad-hoc (à droite) lors de l'utilisation du drone à une hauteur de 10 mètres:
Les mêmes données expérimentales mais pour le fonctionnement du drone à une hauteur de 20 mètres:
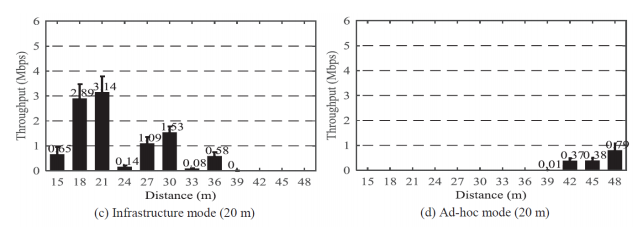
Le taux de transfert de données Wi-F maximum varie en fonction de la version de la norme 802.11. Il est principalement déterminé par les méthodes de modulation, la largeur du canal, le nombre de flux spatiaux, les méthodes de codage et d'étalement du spectre.
Les vitesses maximales réalisables pour l'expérience en question sont données ci-dessous:
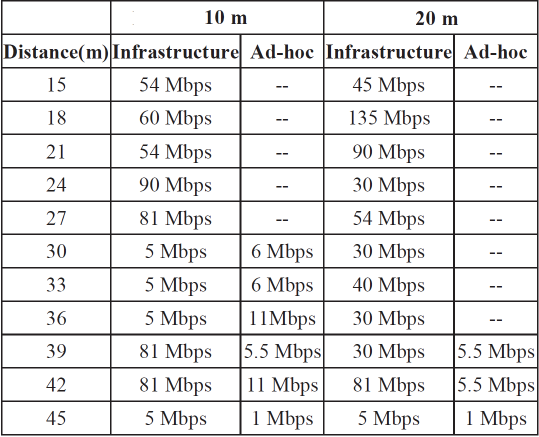
L'augmentation de la distance affecte la qualité de la communication. À son tour, cela oblige les cartes réseau à recourir à des méthodes de modulation plus conservatrices et à réduire les taux de transfert de données. En mode infrastructure, il est possible de supporter des vitesses de transmission plus élevées.
Au-dessus, au cours des expériences, il a été clairement montré quelles opportunités s'ouvrent lors de l'utilisation de quadrocoptères pour scanner des réseaux maillés sans fil configurés automatiquement. Avec le développement des technologies de communication et des véhicules aériens sans pilote, il y aura de nombreuses fois plus de possibilités de développer une telle façon de construire un réseau