Il y a 50 ans, les premiers drones sous-marins n'étaient abordables que pour les militaires et pour la première fois «éclairés» afin de corriger à tout prix le scandale international.
La technologie a ensuite migré au service des magnats du pétrole et du gaz pour la construction et la maintenance de plates-formes de production océanique.
L'étape suivante est la recherche du Titanic (mais en réalité, c'était une reconnaissance sous-marine déguisée). Mais néanmoins, ces expéditions ont apporté des avantages considérables à des fins civiles et scientifiques.
Pour attirer les jeunes dans l'industrie, en 1998, les Américains ont commencé à organiser une compétition internationale d'étudiants, et en 2013 le Championnat d'Asie à Singapour a commencé.
Le prix d'entrée dans l'industrie diminuait progressivement: au début, il n'y avait que des budgets militaires, puis des sociétés pétrolières sont venues, suivies des universités, et enfin, des projets open source d'une valeur de plus de 500 $ pour des "startups de garage" sont apparus. Et maintenant, il y a même un concepteur de bricolage de drones sous-marins pour les étudiants.
 Table des matières1. À la recherche d'une bombe thermonucléaire au fond de la mer d'Espagne2. Plates-formes pétrolières océaniques3. "Titanic" et intelligence sous-marine secrète4. Compétitions internationales: USA et Singapour5. Projets open source, crowdsourcing et designer pour étudiants6. Réalisations des équipes d'étudiants russes
Table des matières1. À la recherche d'une bombe thermonucléaire au fond de la mer d'Espagne2. Plates-formes pétrolières océaniques3. "Titanic" et intelligence sous-marine secrète4. Compétitions internationales: USA et Singapour5. Projets open source, crowdsourcing et designer pour étudiants6. Réalisations des équipes d'étudiants russesRechercher une bombe thermonucléaire
Bombe thermonucléaire B28RI, levée à une profondeur de 869 mètres.Crash d'un avion au-dessus de Palomares .Le magazine Time a inclus l'incident dans la liste des catastrophes nucléaires les plus graves.
Le 17 janvier 1966, un bombardier stratégique américain B-52G avec des armes à fusion à bord est entré en collision avec un avion-citerne KC-135 tout en ravitaillant en vol. À la suite de la catastrophe, 7 personnes ont été tuées et quatre bombes thermonucléaires ont été perdues. Trois d'entre eux ont atterri sur terre et ont été retrouvés immédiatement, le quatrième, qui est tombé dans la mer - seulement après une recherche de deux mois.
L'équipe de recherche comprenait le capitaine Willard Searle, expert en plongée, et un mathématicien, le Dr John Craven, qui, en utilisant la
théorie bayésienne de la localisation efficace des objets perdus, ont élaboré un plan de recherche.
 Obus de deux bombes thermonucléaires B28 de Palomares.
Obus de deux bombes thermonucléaires B28 de Palomares.Pour mener des opérations de recherche, un escadron de la Marine américaine a été formé de 34 navires transportant plus de trois mille marins et entrepreneurs civils. Pour étudier le fond à des profondeurs peu profondes pouvant atteindre 24 mètres, des plongeurs ont été utilisés; les plongeurs en combinaison rigide travaillaient à des profondeurs allant jusqu'à 120 mètres. Des recherches à grande profondeur ont été effectuées par des véhicules sous-marins habités Alvin et Aluminaut.
 Alvin - l'un des véhicules sous-marins habités les plus célèbres (PAP). Le bathyscaphe est conçu pour trois personnes (deux scientifiques et un pilote) et vous permet de plonger à une profondeur pouvant atteindre 4500 mètres en 10 heures.Le premier sous-marin en aluminium au monde , Aluminaut , 1964. Soit dit en passant, Jacques Cousteau l'a ensuite conduit.
Alvin - l'un des véhicules sous-marins habités les plus célèbres (PAP). Le bathyscaphe est conçu pour trois personnes (deux scientifiques et un pilote) et vous permet de plonger à une profondeur pouvant atteindre 4500 mètres en 10 heures.Le premier sous-marin en aluminium au monde , Aluminaut , 1964. Soit dit en passant, Jacques Cousteau l'a ensuite conduit.La bombe a été découverte par Alvin à une profondeur de près de 800 mètres. La bombe reposait sur une pente de 70 degrés de la faille, dont la profondeur atteignait 1300 mètres. La première tentative de levage, faite le 26 mars, en attachant le câble à des élingues de parachute, a été infructueuse. La bombe est tombée et a de nouveau été perdue. Il a été découvert le 2 avril. Le 5 avril, il y a eu une grave situation d'urgence, quand Alvin s'est empêtré dans un parachute, les pilotes de l'appareil ont perdu la vue et n'ont pas pu être libérés pendant 15 minutes.
Dispositif télécommandé Véhicule de récupération sous-marin commandé par câble (CURV).Après cet incident, l'appareil inutilisé télécommandé CURV a été utilisé pour d'autres travaux. Le 7 avril, avec l'aide de l'appareil, il a été possible de fixer deux câbles au parachute, mais en essayant de démarrer le troisième câble, le CURV était également confus et a perdu le contrôle. Les tentatives pour le libérer se sont soldées par un échec, et il a été décidé de lever la bombe avec l'appareil sur deux câbles. La tentative a réussi et la bombe a été posée sur le pont du navire de sauvetage Petrel 81 jours après l'accident.
Selon le New York Times, il s'agissait de la toute première manifestation publique d'une arme nucléaire.L'armée a continué de se développer dans le domaine des appareils télécommandés et autonomes. Entre-temps, l'industrie pétrolière a jeté un œil sur la technologie.
Au service de l'industrie pétrolière et gazière et des plateformes de production

Les «véhicules sous-marins inhabités télécommandés» (TNPA, ROV) ont commencé à gagner en popularité dans les années 1980, lorsque la plupart des nouveaux projets de développement pétrolier et gazier offshore dépassaient les capacités des plongeurs. Mais au milieu des années 80, l'industrie du TNLA maritime a souffert d'une grave stagnation du développement technologique, causée notamment par la chute des prix du pétrole et le ralentissement économique mondial.
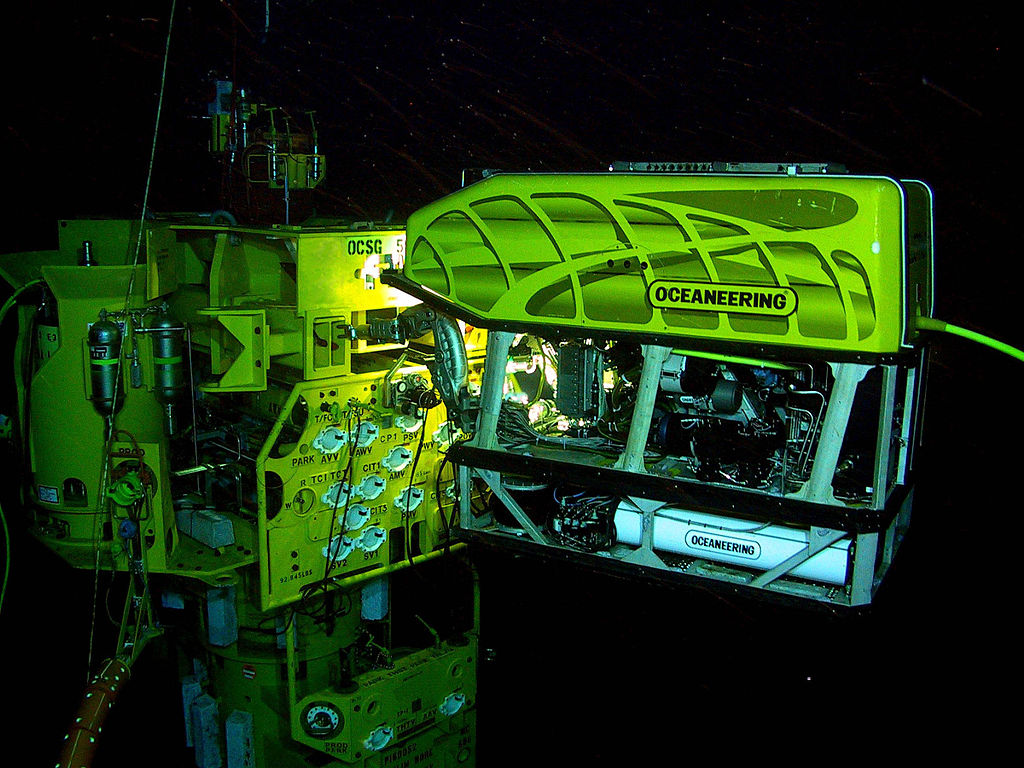 ROV en action sur le champ pétrolier et gazier sous-marin. TNPA tourne les noix sur une structure sous-marine.
ROV en action sur le champ pétrolier et gazier sous-marin. TNPA tourne les noix sur une structure sous-marine.Les TNLA comme celui-ci sont largement utilisés dans la production offshore. Les nouvelles technologies permettent aux robots de plonger encore plus profondément.
Voici d'ailleurs la vidéo légendaire d'un requin mordant un câble sous-marin:
Titanic

Le Titanic a coulé le 15 avril 1912. Des tentatives pour le retrouver ont été faites en 1953, en 1966, en 1970 et en 1980. (En savoir plus
ici .)
Selon les factures, une collection de bijoux d'une valeur d'environ 300 millions de dollars a été transportée sur le Titanic. De plus, à bord se trouvaient les originaux du rubis d'Omar Khayyam, ainsi que la momie de l'ancienne princesse égyptienne.
Robert Ballard a découvert le Titanic en 1985. Bien que cette "expédition" ne soit qu'une couverture. L'opération a été financée par la marine américaine pour le renseignement secret de deux sous-marins nucléaires USS Scorpion et USS Thresher qui ont coulé dans les années 1960, et non le Titanic. Les sous-marins ont coulé respectivement en 1963 et 1968, et les forces navales ont voulu savoir s'il y avait une fuite de rayonnement.
ANGUS est un tas de caméras vidéo et de caméras remorquées par un navire sous l'eau sur un câble:
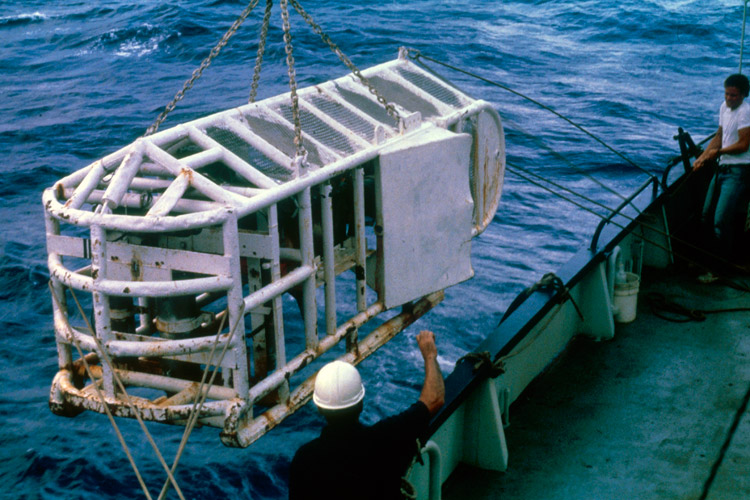 ANGUS (Relevé géologique sous-marin à navigation acoustique). Cet appareil avait des inconvénients: il n'était pas assez efficace. Les images n'ont pu être développées et étudiées qu'après que l'appareil a été remonté à la surface.
ANGUS (Relevé géologique sous-marin à navigation acoustique). Cet appareil avait des inconvénients: il n'était pas assez efficace. Les images n'ont pu être développées et étudiées qu'après que l'appareil a été remonté à la surface.Les créateurs de cet appareil étaient toujours drôles. Les ingénieurs ont affectueusement appelé l'appareil «un imbécile sur une corde» en raison du manque de moyens de contrôle, même les plus simples. Le slogan de l'équipe ANGUS était la phrase "Même si elle fuit, elle continue de cocher".
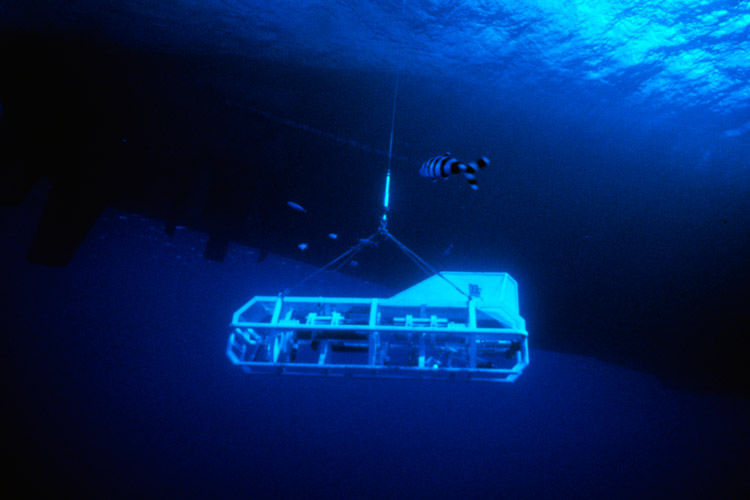 Argo, comme ANGUS, était une structure métallique équipée de cinq caméras vidéo et de deux systèmes de sonar.
Argo, comme ANGUS, était une structure métallique équipée de cinq caméras vidéo et de deux systèmes de sonar.Le 1er septembre 1985, un moniteur connecté à la caméra vidéo Argo a montré des objets d'origine non naturelle. Le lendemain, la coque du Titanic a été découverte, et ANGUS a été envoyé au fond pour la photographie.
Au cours des quatre jours suivants, Argo et ANGUS ont pris des milliers de photographies. L'épave du Titanic a été dispersée sur une zone d'un rayon de 1600 mètres à une profondeur d'environ 3800 mètres.
Le 12 juillet 1986, Ballard effectue la deuxième expédition au Titanic. Maintenant, il a à sa disposition un bathyscaphe pour trois personnes «Alvin» et un robot télécommandé Jason Jr.
.jpg) "Alvin" - l'un des véhicules sous-marins habités les plus célèbres (PAP). Le bathyscaphe est conçu pour trois personnes (deux scientifiques et un pilote) et vous permet de plonger à une profondeur pouvant atteindre 4500 mètres en 10 heures.L'appareil "Jason Junior" (Jason Jr)Etude du Titanic à l'aide de l'appareil Jason Junior.
"Alvin" - l'un des véhicules sous-marins habités les plus célèbres (PAP). Le bathyscaphe est conçu pour trois personnes (deux scientifiques et un pilote) et vous permet de plonger à une profondeur pouvant atteindre 4500 mètres en 10 heures.L'appareil "Jason Junior" (Jason Jr)Etude du Titanic à l'aide de l'appareil Jason Junior.En 1987, le National Geographic Channel a tourné un documentaire à la recherche du Titanic, James Cameron l'a regardé et a été inspiré pour créer son propre chef-d'œuvre.
En septembre 1995, Cameron a personnellement effectué 12 plongées au Titanic sur les bathyscaphes Mir-1 et Mir-2 à bord du navire de recherche russe Akademik Mstislav Keldysh, qui a également été impliqué plus tard dans le film.
Le film Titanic valait plus que le navire lui-même. La construction du navire a coûté 4 000 000 livres, ce qui en argent moderne est 100 000 000 livres, et le coût du film James Cameron est de 125 000 000 livres.
Compétitions internationales
Les compétitions sont une excellente mécanique de jeu qui attire les jeunes et vous permet "d'orienter votre carrière" de nombreux spécialistes dans le domaine d'intérêt. L'émergence de compétitions internationales est une étape importante dans le développement des drones sous-marins et la formation de l'industrie et du marché.
RobosubDes compétitions internationales ont lieu depuis 1998 et ont lieu au US Space and Naval Systems Center.
Site Web -
www.robonation.org/competition/robosubRèglement 2017 (PDF).
 Des
Des véhicules sous-marins
autonomes (AUV) participent à la compétition RoboSub et accomplissent des missions réalistes dans des environnements sous-marins exigeants.

Fondée par l'Association internationale des développeurs de machines sans pilote, la Fondation AUVSI est une organisation à but non lucratif qui offre aux étudiants la possibilité de participer à des activités pratiques de robotique conçues pour stimuler et maintenir leur intérêt pour la science, la technologie, l'ingénierie et les mathématiques (STEM).

Chaque année, la Fondation AUVSI propose un certain nombre de programmes éducatifs, ainsi que des concours de robotique, qui permettent aux étudiants d'appliquer leur formation technique en dehors de la salle de classe. Ces événements sont une préparation idéale pour les activités professionnelles, par conséquent, les étudiants qui y participent se voient souvent offrir le stage et l'emploi convoités avant l'obtention du diplôme.
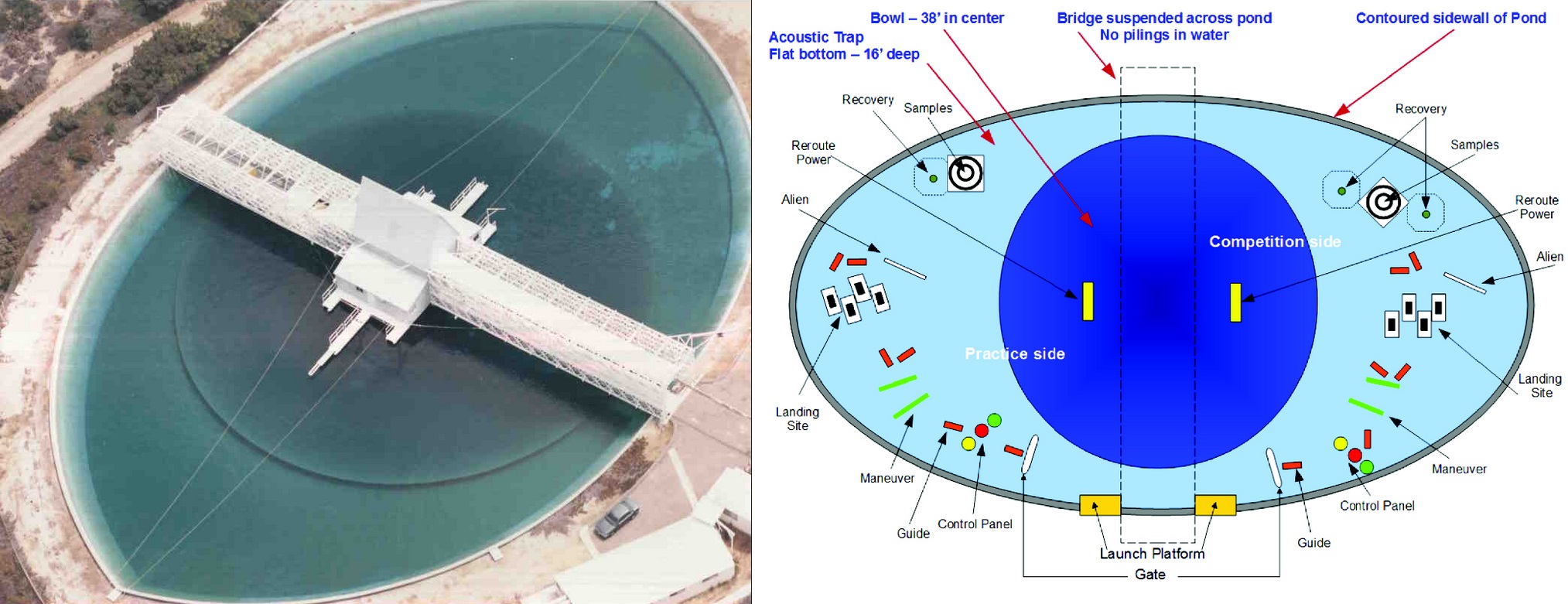
Singapour AUV challenge (SAUVC)Singapore AUV Challenge (SAUVC) Open Asian Underwater Robotics Championship, des compétitions sont organisées à Singapour depuis 2013.
Site Web -
www.sauvc.orgPage Facebook .
Règlement 2018 .
Voici comment le concurrent en 2013 décrit la tâche avec ses propres mots:
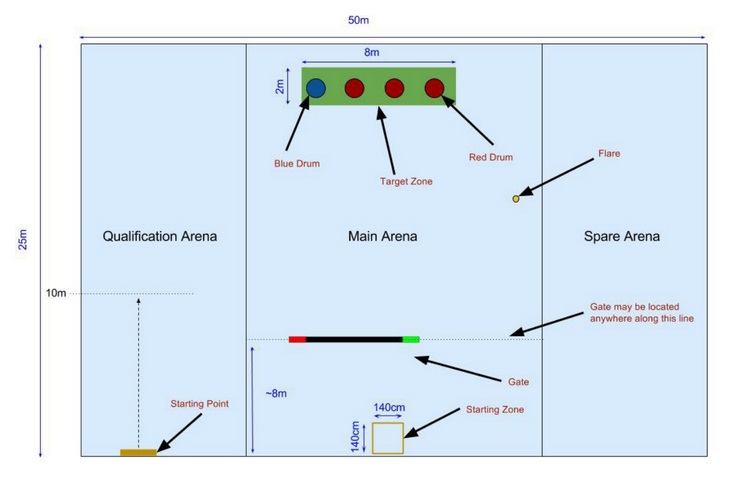
«La tâche peut être approximativement décrite comme suit: vous devez passer par-dessus la bande noire au fond de la piscine et à un moment donné émerger. Autrement dit, un tel robot suiveur de ligne. Les règles, cependant, quelque peu floues décrivent le tout. Il y a des portes par lesquelles vous devez passer. Mais s'il est bon de parcourir la bande, alors vous les traverserez automatiquement. Il y a aussi un support sur lequel le ballon repose et il doit être botté. Encore une fois, si vous marchez bien au-dessus de la bande et à la bonne hauteur, la prochaine fois que vous tournerez la balle, vous frapperez automatiquement. Et vous devez émerger au bon endroit - lorsque la barre noire se termine. En général, toute la compétition tournait autour d'une bande noire en bas :-). »
Une histoire détaillée de 2013 en robotique sous-marine est
ici .

Openrov
The Garage Startup a été le début de l'histoire de Hewlett-Packard et Apple, ainsi que de nombreux autres projets dans la Silicon Valley. Lorsque la technologie devient disponible pour les «pirates», ils commencent à expérimenter par eux-mêmes et à trouver des solutions incroyables.
En 2012, le projet OpenROV, un mini robot sous-marin télécommandé pesant environ 2,5 kg, a été lancé sur Kickstarter. Il est contrôlé depuis un ordinateur portable, équipé d'une caméra vidéo avec rétro-éclairage. Profondeur d'immersion: jusqu'à 100 mètres, autonomie de la batterie: ~ 1,5 heure. Il est entraîné par trois moteurs sans balais (moteur sans balais 800Kv): deux dans le plan horizontal et un dans le plan vertical. Pour obtenir une image visuelle, une caméra Web conventionnelle (Microsoft LifeCam HD-5000) est utilisée, qui est connectée via USB à BeagleBone.
Le kit se présente sous forme de pièces détachées à assembler. Les développeurs du projet se sont fixé pour objectif de rendre la recherche sous-marine bon marché et accessible à tous, sur la base des principes des logiciels open source et du matériel open source. Les dessins sont disponibles sur
GitHub .
Performance chez TED:
 La carte Beagle est utilisée comme ordinateur de bord.Trident 2016 (prochaine version d'OpenROV)
La carte Beagle est utilisée comme ordinateur de bord.Trident 2016 (prochaine version d'OpenROV)StartROV OpenROV, États-Unis, recueille des fonds pour créer le véhicule de contrôle sous-marin (ROV) Trident. L'entreprise prévoyait de lever 50 000 $, mais a déjà attiré plus de 560 000 $.
OpenROV 2.8 et Trident DronesLa plage de contrôle va jusqu'à 100 mètres. Poids - 2,9 kg. La vitesse maximale est de 2 m / s. Autonomie de la batterie - 3 heures. Support pour le vol stationnaire automatique et le maintien de la direction du mouvement. Il peut être connecté à des lunettes de réalité virtuelle pour un contrôle à la première personne.
Gladius 2017En 2017, un autre
projet de crowdfunding d'un robot sous-marin est apparu sur le site IndiGoGo.

Caméra vidéo 4k, 100 mètres de profondeur, 500 rayon d'action, prix 600-1700 dollars.
Designer pour écoliersMUR - Pack Compétition JuniorSkills.
Le développement a été présenté par Sergey Moon de Vladivostok lors de l'exposition RoboMech-2015 à Khabarovsk le 12 novembre.
Site du projet -
murproject.comSur la base de ce constructeur, l'Olympiade NTI est organisée pour les lycéens de toute la Russie sur le profil
«Water Robotic Systems» .
Aux étapes de qualification, il est nécessaire de résoudre les problèmes de physique et d'informatique, ainsi que de maîtriser le contrôle des robots sous-marins sur un simulateur 3D.
Au stade final, les tâches sont plus intéressantes:
- assemblage de deux robots sous-marins du concepteur (le concepteur MUR est proposé);
- les deux robots doivent tenir la distance, guidés par des objets sous-marins. Mais un seul robot est équipé de caméras, le second devrait recevoir un signal du premier robot;
- développement de leur propre dispositif de communication entre robots, utilisant les composants proposés et ayant accès aux protocoles et circuits électriques du concepteur;
- organisation de la communication entre robots.
En 2017, l'Olympiade «Water Intelligent Robotic Systems» s'est tenue à Innopolis. (Les règles sont
ici .)
Russie, Vladivostok
J'ai été très heureux de savoir que l'équipe de développement de drones sous-marins de ma ville et de mon
université (FEFU) est tellement cool.
 Depuis 2012, l'équipe conjointe de robotique de l'Université fédérale d'Extrême-Orient et de la branche extrême-orientale de l'Académie russe des sciences devient chaque année lauréate de la catégorie des robots autonomes lors des tournois mondiaux RoboSub et des championnats asiatiques de Singapour AUV Challenge.
Depuis 2012, l'équipe conjointe de robotique de l'Université fédérale d'Extrême-Orient et de la branche extrême-orientale de l'Académie russe des sciences devient chaque année lauréate de la catégorie des robots autonomes lors des tournois mondiaux RoboSub et des championnats asiatiques de Singapour AUV Challenge.Et voici le Junior, le robot avec lequel l'équipe de Vladivostok
capture les profondeurs des bassins et remporte des prix.
 Robosub
Robosub2012 - 5e place (FEFU, Vladivostok)
2013 - 3e place (FEFU, Vladivostok)
2014 - 4e place (FEFU, Vladivostok)
2015 - 3e et 6e places (Université Maritime du nom de Nevelsky et FEFU, Vladivostok)
2016 - 4e place (Université Maritime du nom de Nevelsky, Vladivostok)
2017 - 2e place (FEFU, Vladivostok)
Singapour AUV challenge2013 - 1ère place (FEFU, Vladivostok)
2015 - 2e place (FEFU, Vladivostok)
2016 - 2e place (FEFU, Vladivostok)
2017 - 1ère place (FEFU, Vladivostok)
J'écrirai sur l'équipe de Vladivostok (entretiens avec les développeurs, les caractéristiques de performance du robot, etc.) et sur les règles des compétitions internationales dans le prochain numéro.Les sources
- Crash d'un avion au-dessus de Palomares , Wikipedia
- Palomares. Bombes à hydrogène sur la plage , TopWar
- Immersion complète: comment l'utilisation de robots à la recherche du Titanic a changé l'approche de la recherche sous-marine , T&P
- Des moyens inhabituels pour élever le "Titanic": versions de scientifiques , RIA Novosti
- Robert Bollard explore les océans , TED
- The Way of James Cameron , Wired, Geektimes
- James Cameron: Avant Avatar ... le garçon curieux , TED
- Robosub
- Robo saison 2013: de sous l'eau au ciel , Geektimes
- OpenRov , Wikipedia
- OpenROV - Underwater Robot (open source) , Habrahabr
- David Lang: mon robot sous-marin , TED
- Drone sous-marin OpenROV Trident , Geektimes
- Concepteur pour étudiants Micro Underwater Robot Edu
- NTI Olympiad: Systèmes robotiques hydrauliques