 Carcraft, logiciel pour construire un monde virtuel
Carcraft, logiciel pour construire un monde virtuelAu coin du campus d'Alphabet, il y a une équipe qui travaille sur un logiciel qui pourrait être la clé de la création de robots. Aucun journaliste ne l'a jamais vu auparavant. Ils l'appellent Carcraft, après le jeu populaire World of Warcraft.
Le créateur du logiciel, un jeune ingénieur aux cheveux ébouriffés et au visage de garçon, James Stout, est assis à côté de moi dans un bureau ouvert, où règne le silence et où tout le monde utilise des écouteurs. L'écran montre une section d'une route virtuelle avec un mouvement circulaire. Il n'y a rien à voir - une simple image de plusieurs lignes et un arrière-plan avec des textures de route. Nous voyons une voiture robotisée Chrysler Pacifica à moyenne résolution et un simple filaire représentant un autre véhicule.
Il y a quelques mois, l'équipe de développement est tombée sur un tel mouvement circulaire au Texas. La vitesse et la complexité de la situation routière ont mis la voiture dans une position difficile, alors l'équipe a décidé de construire un morceau de la route de la même configuration sur le site d'essai. Et je regarde déjà la troisième étape du processus de formation: la numérisation de la conduite réelle. Ici, la seule manœuvre du conducteur dans le monde réel - par exemple, une voiture qui vous coupe dans un mouvement circulaire - peut être transformée en milliers de scénarios simulés qui sondent les limites des capacités d'une voiture.
Ces scénarios constituent la base d'un puissant outil de simulation. «La plupart du travail sur les nouvelles fonctionnalités est motivé par ce que nous avons vu dans les simulations», me dit Stout. Cet outil a accéléré le développement des véhicules robotiques chez Waymo, mis en place par Alphabet (girlly Google) à partir de son unité de recherche X en décembre 2016.
Si Waymo peut créer des voitures entièrement autonomes dans les prochaines années, Carcraft devrait être considéré comme un monde virtuel qui a joué un rôle important dans le changement du monde réel sur lequel il a été créé.
Initialement, il a été conçu pour faire défiler les scènes rencontrées par les voitures lors de leurs déplacements sur la voie publique. Maintenant, Carcraft, et en général toutes les simulations, jouent un rôle croissant dans le développement de véhicules robotiques.
À chaque instant, environ 25 000 robots électriques virtuels labourent des versions entièrement modélisées d'Austin, Mountain View et Phoenix, ainsi que plusieurs pistes d'essai. Waymo peut jouer une simulation d'un voyage le long d'une route particulièrement difficile des centaines de milliers de fois par jour. Au total, dans le monde virtuel, les voitures parcourent jusqu'à 13 millions de kilomètres par jour. En 2016, ils ont parcouru 2,5 milliards de miles virtuels, contre seulement 3 millions de miles parcourus par de vrais prototypes Google de Google sur de vraies routes. Et, plus important encore, les kilomètres virtuels se concentrent sur ce que les employés de Waymo appellent les routes «intéressantes» où les voitures peuvent apprendre quelque chose de nouveau. Ce n'est pas seulement des kilomètres ennuyeux sur l'autoroute sur le chemin du travail.
Les simulations font partie du processus complexe développé par Waymo. Ils ont étroitement lié les millions de kilomètres parcourus par leurs voitures en DOP avec le programme «d'inspection structurelle» qu'ils passent à la base secrète de Zamok dans la vallée centrale.
Jusqu'à présent, Waymo n'a pas révélé son système au monde. Les kilomètres parcourus sur les routes régulières leur montrent où leurs voitures ont besoin de plus d'entraînement. Ils construisent des routes de la configuration nécessaire dans le château, ce qui leur permet de jouer des milliers de scénarios différents directement sur place. Et dans l'un des deux types de contrôles, dans le monde réel, les machines collectent suffisamment de données afin de recréer complètement la situation sous forme numérique à tout moment. Dans cet espace virtuel, vous pouvez vous libérer des limites de la vie réelle et créer des milliers d'options pour n'importe quel scénario, puis faire en sorte que la voiture les traverse toutes. Pour améliorer le logiciel qui conduit la voiture, il est téléchargé à nouveau dans les voitures, qui roulent ensuite sur des routes encore plus longues et d'une complexité encore plus grande, et le cycle se répète.
Pour se rendre au château, depuis la baie de San Francisco, vous devez aller vers l'est, puis le sud le 99, puis le long de la Central Valley Highway, en direction du sud jusqu'à Fresno. Les champs de maïs sont adjacents aux banlieues en croissance; l'horizon disparaît derrière la brume agricole. Il fait 30 degrés de plus que San Francisco, et la surface est si plate que les pentes de cette «mer terrestre», comme l’appelait
John McPhee , ne peuvent être mesurées qu’avec des lasers. Vous déménagez près de la petite ville d'Etwater, où se trouvait autrefois la Castle Air Force Base, où 6 000 personnes ont servi le programme B-52. Maintenant, il est situé à la frontière nord de la petite ville de Merced, où le chômage dans les années 2010 a atteint 20%, et même aujourd'hui, il est rarement inférieur à 10%. 40% de la population parle espagnol. Nous traversons le chemin de fer et tombons sur le territoire de l'ancienne base de 650 hectares, sur laquelle se trouvent maintenant toutes sortes de choses, du service de contrôle de la faune à cette prison d'État de l'eau.
Mon navigateur au téléphone ne m'a pas conduit à une adresse précise, mais à des coordonnées GPS. Nous longeons une grande clôture verte opaque jusqu'à ce que Google Maps vous indique qu'il est temps de s'arrêter. Rien n'indique la présence de portes. Tout ressemble à une autre section de la clôture, mais mon représentant hôte semble confiant. Soudain, dans l'écart grandissant entre le portail et la clôture, un gardien apparaît et commence à vérifier nos documents.
 La clôture
La clôtureLa clôture s'est séparée et nous sommes entrés dans un campus animé. Des jeunes en shorts et chapeaux vont et viennent. Vous pouvez voir des voitures résidentielles, des garages à dôme et dans le parking près du bâtiment principal - des robomobiles. Voici quelques types de robomobiles - des modèles Lexus que les résidents américains pourraient rencontrer dans les fourgons DOP, Prius, à la retraite et neufs Chrysler Pacifica.
Les robots sont faciles à distinguer. Ils sont parsemés de capteurs. Plus que d'autres, des scanners laser (lidars) sur le toit sont émis. Mais Pacifica a également de petits lidars de la taille d'une canette de bière tournant autour des rétroviseurs latéraux. À l'arrière, ils sont équipés de radars similaires aux oreilles de Shrek.
Lorsque vous allumez les capteurs de la machine, même si elle ne bouge pas, le lidar rotatif fait un bruit étrange. Quelque chose entre le hurlement et le bourdonnement, ce son est désagréable car il me semble une nouveauté et mes oreilles ne sont pas en mesure de le filtrer avec les autres sons des voitures avec lesquelles j'ai grandi.
Une voiture encore plus intéressante est garée dans le bâtiment principal. Des panneaux X sont imprimés sur tout le corps avec du ruban adhésif. C'est une voiture de quatrième niveau. Les niveaux sont des désignations développées par la communauté des ingénieurs automobiles qui décrivent le degré d'autonomie d'un robot. Ces voitures sur les routes dont nous entendons parler sont au premier ou au deuxième niveau - c'est-à-dire qu'elles peuvent utiliser un régulateur de vitesse «intelligent» sur l'autoroute. Mais la voiture avec les X rouges est une bête complètement différente. Il n'est pas seulement complètement autonome, la personne à l'intérieur ne pourra tout simplement pas le conduire - par conséquent, ils ne veulent pas le mélanger avec leurs autres machines.
Nous roulons jusqu'au parking, et partout les panneaux du projet Manhattan, un avant-poste scientifique et une start-up technologique sont partout. Dans le bâtiment principal, une voiture mobile de la taille d'une salle de classe, je rencontre la force motrice de tout cet endroit remarquable. Son nom est Stef Villegas.
Elle porte un long chemisier à col blanc ajusté, un jean terriblement déchiré et des baskets en tricot gris - tous terriblement à la mode, comme un ancien employé de la boutique Azalea, d'où elle a déménagé à Google, suit. Elle a grandi dans une banlieue d'East Bay de l'autre côté des collines de Berkeley et a obtenu un diplôme en art de l'Université de Californie à Berkeley avant d'entrer dans le programme de développement de voitures robotisées en 2011.
"Avez-vous conduit une voiture?" Je demande.
«Je conduis tout le temps», dit-elle.
Elle passe d'innombrables heures à rouler sur les autoroutes 101 et 280, de San Francisco à Mountain View. Comme tous les conducteurs, elle a développé un sens du comportement des voitures sur l'autoroute. Et cette connaissance s'est avérée très importante pour le programme de développement de voitures robotisées. Ils ont développé une idée intuitive de ce qui peut être difficile pour les machines. «En vérifiant le logiciel mis à jour et en occupant un poste permanent dans l'équipe, j'ai commencé à réfléchir aux autres tâches complexes qui pourraient être définies pour le système», explique-t-elle.
Villegas et plusieurs ingénieurs ont donc commencé à imaginer et à créer de rares scénarios de situations qui leur permettraient de tester le nouveau comportement des machines dans un environnement contrôlé. Ils ont commencé à occuper le parking en face de l'
amphithéâtre côtier , en installant à l'entrée de leur peuple afin que seuls les googleurs restent dans le parking.
«Tout a commencé là-bas», dit-elle. "Moi et plusieurs chauffeurs étions là." Nous avons proposé un ensemble d'idées que nous voulons tester, avons chargé tout ce dont nous avions besoin dans une camionnette et l'avons conduit à travers le parking, en vérifiant. »
C'est ainsi que les premiers tests structurés ont vu le jour dans le cadre du programme de développement de robotique. Il s'avère que la chose la plus difficile a été de traiter des scénarios non compliqués inventés par les gens, tels que «que s'il y a un zombie sur la route», mais simplement de conduire avec confiance et fiabilité dans des variantes sans fin du trafic ordinaire.
Villegas a commencé à collecter des accessoires de tout ce qu'elle pouvait obtenir: mannequins, cônes, plantes artificielles, jouets, planches à roulettes, tricycles, poupées, balles, toutes sortes de choses. Tout cela est entré dans un ensemble d'accessoires (en conséquence, ils ont commencé à le stocker dans une tente, et maintenant - dans le château, dans un entrepôt spécial).
 Entrepôt requis
Entrepôt requisMais il y avait des problèmes. Il fallait que la voiture roule plus vite, reconnaisse les feux et les panneaux de signalisation. Les plans ont constamment interféré avec les concerts organisés dans l'amphithéâtre. «Il y a eu des cas comme:« Eh bien, Metallica arrive, nous devrons le jeter », dit-elle.
Ils avaient besoin d'une base secrète. Le château était juste ça. Ils ont signé un bail et ont commencé à construire leur fausse ville de rêve. «Nous avons spécifiquement créé des rues résidentielles, des autoroutes, des impasses, des parkings, et tout cela, afin que nous obtenions une sélection représentative de lieux caractéristiques que vous pourriez parcourir.»
Nous allons du bureau principal à sa voiture. Elle me donne une carte lorsque nous partons en excursion. «C'est comme Disneyland pour que vous puissiez naviguer», dit-elle. La carte est soigneusement conçue. Dans un coin se trouve un badge de style Vegas: "Bienvenue au château de conte de fées en Californie." Différentes zones du campus respectent même les règles de dénomination. Dans celle que nous conduisons, chaque route porte le nom de la célèbre voiture (
DeLorean ,
Bullitt ) ou en l'honneur de la voiture du premier parc basé sur Prius, qui existait au début du programme (Barbaro).
Nous passons devant les bâtiments rosâtres, l'ancienne caserne, dont l'un a été rénové - les employés de Waymo s'y reposent lorsqu'ils ne reviennent pas dans la baie. En plus de cela, il n'y a pas d'autres bâtiments dans la zone d'essai. C'est vraiment une ville pour les robomobiles: tout ce qui compte est soit sur le trottoir lui-même, soit en bordure.
 "Ville" dans le château
"Ville" dans le châteauPour une personne, tout cela ressemble au niveau d'un jeu d'ordinateur sans personnages. Il est plutôt étrange que vous vous sentiez en quittant les boulevards vers des rues apparemment résidentielles avec des allées en ciment et des échangeurs de banlieue sans bâtiments. Certaines sections de la route me semblent périodiquement familières.
Nous approchons d'un grand rond-point à deux voies. Au centre se trouve un cercle avec une clôture blanche. «Ce rond-point est apparu ici précisément après que nous ayons testé le rond-point à plusieurs voies à Austin, au Texas», explique Villegas. - Au début, nous n'avions qu'un rond-point à une seule voie, et nous avons décidé: "Bon, d'accord, nous avons terminé cette étape." Et puis nous sommes tombés sur un multibande et nous sommes émerveillés: «Wow, un cheval d'une couleur différente! Merci Texas. ' Par conséquent, nous avons créé cette beauté en nous-mêmes. »

Nous nous arrêtons et Villegas envisage un nouvel ajout: deux voies pour voitures et une piste cyclable passent devant un parking parallèle bordant la pelouse. «Je voulais vraiment créer une rue avec un parking parallèle ici. Cela se trouve souvent dans les banlieues. Walnut Creek. Vue sur la montagne. Palo Alto », dit-elle. - Les gens sortent des magasins ou du parking. Les gens marchent entre les voitures, traversent la route avec les choses entre leurs mains. » La bande était un fragment de sa mémoire, incarnée dans l'asphalte et le béton, qui se transformerait ensuite en une forme plus abstraite, pour améliorer la capacité du robot à traiter le terrain familier.
Elle me ramène au bureau principal et nous montons dans la fourgonnette robotique, l'une des Chrysler Pacificas. Notre chauffeur est Brandon Kane. Son assistant sur le siège passager surveillera le comportement de la voiture sur un ordinateur portable à l'aide du programme XView.
Un groupe d'assistants, qu'ils appellent «renards», travaille avec eux - le surnom est passé du mot «artificiel» [renard - renard, faux - artificiel / env. trad.]. Ils conduisent des voitures, créent du trafic, jouent aux piétons, font du vélo, tiennent des panneaux d'arrêt. Ce sont les acteurs dont le public est la voiture.
Notre premier contrôle est un simple passage et découpe, mais à grande vitesse. Dans ce cas, c'est 70 km / h. Nous roulons tout droit le long de la large route qu'ils appelaient l'autoroute.
Lorsque le renard nous coupe, la machine Waymo freine et l'équipe vérifie un indicateur clé dans ce cas: le freinage. Ils essaient de créer des situations dans lesquelles la voiture devra freiner brusquement. Quelle netteté? Quelque part entre "l'enfer, je n'ai pas le temps pour un feu de signalisation" et "j'ai transpiré brusquement et le téléphone s'est envolé du siège".
Je dirai une chose étrange: ce n'est pas mon premier voyage en robotique. Dans le passé, j'ai conduit deux fois dans deux robots différents: la première fois sur un VUS Lexus qui m'a conduit dans les rues de Mountain View, et la seconde sur une petite voiture Google Firefly qui roulait sur le toit d'un immeuble Google. Ce sont des voyages banals auxquels, en fait, tout le monde aspire.
Maintenant, tout est différent. Deux voitures rapides, dont l'une devrait nous couper assez fortement.
Il est temps de commencer. Kane démarre la voiture et après un bip, la voiture dit: "Auto". Une autre voiture s'approche de nous et nous coupe en tant que pilote Porsche, s'efforçant d'être le premier à conduire jusqu'à la sortie. Nous freinons fortement, rapidement et en douceur. Je suis impressionné.
Ils vérifient les données de freinage et comprennent que nous ne freinons pas assez fort. Je dois le répéter. Et encore et encore ... La deuxième voiture nous coupe sous différents angles, de manière différente. Ils appellent cela «obtenir une couverture».
 Reconstruisez à grande vitesse. L'une des voitures est autonome.
Reconstruisez à grande vitesse. L'une des voitures est autonome.Nous effectuons trois autres vérifications - reconstruire à grande vitesse, rencontrer une voiture qui recule d'une allée à trois pâtés de maisons de nous, et un arrêt en douceur à la vue d'un ballon de basket qui s'est déployé sur la route. Chacune des manœuvres est impressionnante à sa manière, mais je me souviens du test avec le plus de sous-cotation.
Quand nous allons au redémarrage, Kane se déplace vers le siège. "Avez-vous regardé le
Pacific Rim ?" Me demande-t-il. - Film Guillermo del Toro, où les gens synchronisent des actions avec des robots géants pour combattre des monstres. J'essaie de synchroniser les actions avec un robot. Nous avons des idées communes. »
Je lui demande d'expliquer ce qu'il veut dire. «J'essaie de m'adapter à la différence de poids due aux personnes présentes dans la voiture», dit-il. - Je passe beaucoup de temps dans la voiture et je peux sentir ce qu'elle fait - ça a l'air étrange, oui - avec mon cul. Je comprends en quelque sorte ce qu'elle veut faire. "
Loin de la brume et de la chaleur du château de Mountain View, le siège social confortable de Google est situé. Je suis venu chez eux pour rencontrer des ingénieurs travaillant à l'intérieur de X, que vous connaissez peut-être sous le nom de Google X. Cette division de l'entreprise est engagée dans des projets de recherche à long terme et à haut risque. En 2015, lorsque Google a restructuré et organisé le conglomérat Alphabet, X a abandonné Google dans le titre (leur site Web s'appelle X.company). Un an après cela, X / Alphabet a décidé de séparer le programme de création de robomobiles en une entreprise distincte, comme cela s'est déjà produit avec divers autres projets, et Waymo est apparu. Il ressemble à un cousin de Google.
Ainsi, bien que les bureaux de Waymo soient toujours à l'intérieur du «navire transporteur», ces deux clics se séparent déjà lentement, et tous les employés de Waymo sont assis séparément.
Le bâtiment X / Waymo est grand et léger. Les prototypes de drones Project Wing sont partout. Je vois une petite machine à écrire Firefly construite par l'entreprise. "Il y a quelque chose de bien dans ce que vous avez fait vous-même", m'a dit Villegas au château. "Mais il n'y avait pas de climatisation dedans, donc je ne les manque pas."
Non loin de la cafétéria dans le coin de l'une des ailes du bâtiment se trouve le cluster de simulation Waymo. Tout le monde semble avoir Carcraft et XView sur les écrans. Un nombre sensiblement plus grand de polygones sur un fond sombre. Ce sont ces gens qui créent les mondes virtuels sur lesquels roulent les voitures Waymo.
 Ce que le scanner laser Waymo a vu lorsque quatre poussaient une voiture
Ce que le scanner laser Waymo a vu lorsque quatre poussaient une voitureJ'attends James Stout, créateur de Carcraft. Il n'a pas la possibilité de parler publiquement de son projet, donc son enthousiasme éclate. Carcraft est son idée originale.
«Je cherchais des postes vacants et j'ai vu que l'équipe de création de robomobiles recrutait des employés», dit-il. "Je ne peux pas croire qu'ils viennent de publier un emploi." Il a rejoint l'équipe et s'est immédiatement mis à créer un instrument, grâce auquel 8 millions de miles virtuels par jour sont parcourus aujourd'hui.
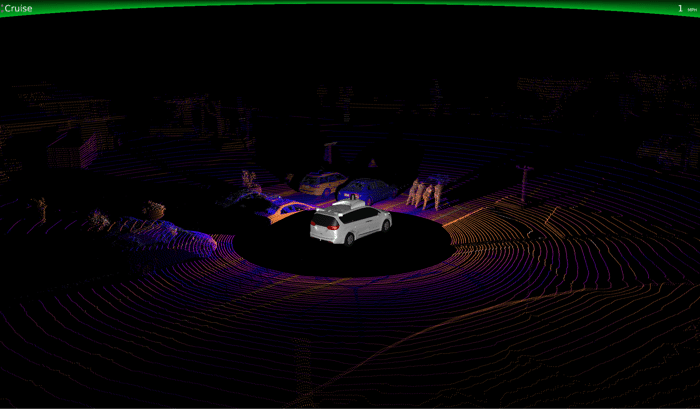
Initialement, l'outil a été utilisé principalement pour surveiller ce que feraient leurs voitures dans des situations difficiles dans lesquelles des conducteurs en direct prennent le contrôle de la voiture. À partir de tels moments, ils ont commencé à créer des scripts. «Il est rapidement devenu évident qu'il s'agissait d'un outil très utile et que beaucoup de choses pouvaient être créées sur cette base», explique Stout. Les possibilités de Carcraft se sont développées de sorte que maintenant il s'adapte à des villes entières, et le nombre de voitures est devenu un immense parc virtuel.Stout me présente Elena Kolarov, chef du département des services de script. Devant elle, deux moniteurs. À droite, la Xview montre ce que la machine voit. La machine utilise des caméras, un radar et un lidar pour identifier les objets dans le champ de vision - elle les présente sous la forme de petites formes filaires.Des lignes vertes émergent des formes et montrent les manières possibles selon lesquelles, selon la machine, les objets peuvent se déplacer. Ci-dessous, une partie de l'image, qui montre que des caméras de voiture ordinaires sont prises. Kolyarova peut activer l'affichage des données reçues du lidar - elles sont affichées en points orange et violet.Nous cherchons à reproduire le cas réel de réarrangement en une seule ligne dans un mouvement circulaire dans le château. Kolyarova passe au simulateur. Tout se ressemble, mais ce n'est pas un enregistrement de l'événement, mais une nouvelle situation à laquelle la machine doit faire face. La seule différence est qu'en haut de l'écran il y a une inscription «simulation», en grosses lettres rouges. Stout dit qu'il devait l'ajouter parce que les gens confondaient constamment la simulation avec la réalité. A quoi ressemble le mouvement circulaire dans le château dans XViewIls chargent une situation différente. C'était à Phoenix. Kolyarova agrandit l'image pour montrer son modèle de la ville. Pour l'ensemble du modèle, ils ont indiqué: «où sont toutes les voies, quelles voies se transforment en où, où sont les panneaux d'arrêt, où sont les feux de circulation, les trottoirs, où sont les centres de voie - tout ce que vous devez savoir», explique Stout.
A quoi ressemble le mouvement circulaire dans le château dans XViewIls chargent une situation différente. C'était à Phoenix. Kolyarova agrandit l'image pour montrer son modèle de la ville. Pour l'ensemble du modèle, ils ont indiqué: «où sont toutes les voies, quelles voies se transforment en où, où sont les panneaux d'arrêt, où sont les feux de circulation, les trottoirs, où sont les centres de voie - tout ce que vous devez savoir», explique Stout.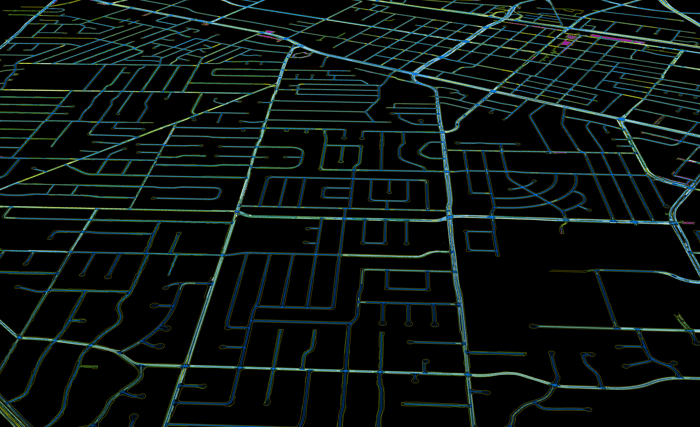 Maintenant, nous augmentons une intersection à quatre voies quelque part près de Phoenix. Kolyarova commence à y placer des voitures artificielles, des piétons et des cyclistes.
Maintenant, nous augmentons une intersection à quatre voies quelque part près de Phoenix. Kolyarova commence à y placer des voitures artificielles, des piétons et des cyclistes. Créer une situation artificielle dans CarcraftEn appuyant sur une touche de raccourci, les objets commencent à se déplacer. Les voitures se comportent comme des voitures, roulent dans leur voie ou tournent. Les cyclistes se comportent en conséquence. Leur logique est tirée des données obtenues à partir du million de miles roulé sur le DOP. Et tout cela est basé sur une carte super détaillée du monde et des modèles physiques des différents participants à la situation.
Créer une situation artificielle dans CarcraftEn appuyant sur une touche de raccourci, les objets commencent à se déplacer. Les voitures se comportent comme des voitures, roulent dans leur voie ou tournent. Les cyclistes se comportent en conséquence. Leur logique est tirée des données obtenues à partir du million de miles roulé sur le DOP. Et tout cela est basé sur une carte super détaillée du monde et des modèles physiques des différents participants à la situation. Sans surprise, le plus difficile est de simuler le comportement des autres. "Je ne m'inquiète pas pour vous au volant, je m'inquiète pour tout le monde sur la route."«Nos voitures voient le monde, comprennent le monde. Ils comprennent les intentions de tous les participants en mouvement dans l'environnement - voitures, piétons, cyclistes, motocyclistes. Il ne suffit pas de simplement suivre un objet dans l'espace. Vous devez comprendre ce qu'il fait », explique Dmitry Dolgov, vice-président du développement chez Waymo. - Il s'agit d'une tâche clé dans la création d'un robot motorisé qualifié et sûr. "Une telle simulation, une telle compréhension du comportement des autres participants au mouvement, est très similaire à la modélisation de leur comportement dans une simulation."
Sans surprise, le plus difficile est de simuler le comportement des autres. "Je ne m'inquiète pas pour vous au volant, je m'inquiète pour tout le monde sur la route."«Nos voitures voient le monde, comprennent le monde. Ils comprennent les intentions de tous les participants en mouvement dans l'environnement - voitures, piétons, cyclistes, motocyclistes. Il ne suffit pas de simplement suivre un objet dans l'espace. Vous devez comprendre ce qu'il fait », explique Dmitry Dolgov, vice-président du développement chez Waymo. - Il s'agit d'une tâche clé dans la création d'un robot motorisé qualifié et sûr. "Une telle simulation, une telle compréhension du comportement des autres participants au mouvement, est très similaire à la modélisation de leur comportement dans une simulation.": , , , . , , , , « , , », – .
. , , , , : .
. V, , Carcraft . : bird_squirrel.
Waymo Carcraft, – . « , », – .
Une fois la base de la situation configurée, vous pouvez commencer à vérifier toutes les options importantes qu'elle contient. Supposons que vous vouliez vérifier à une seule intersection la séquence différente d'arrivée des voitures, des piétons et des cyclistes, l'heure à laquelle ils s'arrêtent, leur vitesse et tout le reste. Ensuite, vous pouvez simplement définir des intervalles raisonnables pour les paramètres correspondants et perdre toutes les combinaisons de cette situation.Ils appellent cela flou, et dans ce cas, 800 situations ont été automatiquement créées à notre intersection. Le résultat est un magnifique diagramme en dentelle - et tous les programmeurs peuvent le vérifier et voir comment différentes combinaisons de variables affectent le chemin choisi par le robot. Tableau des électionsLe défi consiste à analyser toutes ces options et simulations pour trouver des données intéressantes qui peuvent aider les programmeurs à améliorer leur programme de conduite. La première étape peut être: la voiture était-elle coincée? Si c'est le cas, alors cette situation devient intéressante afin de travailler avec elle.L'animation ci-dessous montre une telle situation. L'intersection complexe qui existe en réalité dans Mountain View. En tournant à gauche, la voiture a repéré une cycliste qui est apparue, c'est pourquoi elle s'est arrêtée sur la route. Les programmeurs ont pris cette classe de problèmes et ont repensé le logiciel pour qu'il réponde correctement à la situation. La vidéo montre la situation réelle, puis sa simulation. Là où ils divergent, vous pouvez voir que la machine simulée continue de se déplacer, puis une boîte en pointillé apparaît avec l'inscription "shadow_vehicle_pose". La boîte en pointillés montre ce qui s'est passé dans la réalité. Pour les employés de Waymo, c'est la visualisation la plus claire des progrès.
Tableau des électionsLe défi consiste à analyser toutes ces options et simulations pour trouver des données intéressantes qui peuvent aider les programmeurs à améliorer leur programme de conduite. La première étape peut être: la voiture était-elle coincée? Si c'est le cas, alors cette situation devient intéressante afin de travailler avec elle.L'animation ci-dessous montre une telle situation. L'intersection complexe qui existe en réalité dans Mountain View. En tournant à gauche, la voiture a repéré une cycliste qui est apparue, c'est pourquoi elle s'est arrêtée sur la route. Les programmeurs ont pris cette classe de problèmes et ont repensé le logiciel pour qu'il réponde correctement à la situation. La vidéo montre la situation réelle, puis sa simulation. Là où ils divergent, vous pouvez voir que la machine simulée continue de se déplacer, puis une boîte en pointillé apparaît avec l'inscription "shadow_vehicle_pose". La boîte en pointillés montre ce qui s'est passé dans la réalité. Pour les employés de Waymo, c'est la visualisation la plus claire des progrès. Mais ils doivent rechercher non seulement les cas dans lesquels la voiture est coincée. Ils peuvent rechercher des situations dans lesquelles le temps consacré à la solution était trop long ou le freinage trop lent. Tout ce que les programmeurs affinent et étudient, ils simulent pour trouver des problèmes.Stout et le chef du département du logiciel de la dette ont spécifiquement spécifié que la simulation a trois propriétés principales. Premièrement, dans la simulation, vous pouvez parcourir beaucoup plus de kilomètres qu'il ne serait possible avec un parc physique; et l'expérience est bonne. Deuxièmement, ces kilomètres se concentrent sur des interactions intéressantes et complexes, et pas seulement sur des kilomètres ennuyeux. Troisièmement, les cycles de développement logiciel peuvent aller beaucoup plus vite."Le cycle de répétition est extrêmement important pour nous, et le travail effectué sur la simulation nous permet de le compresser de manière drastique", m'a expliqué Dolgov. "Un cycle qui prendrait des semaines pour travailler avec nous pour la première fois, passe maintenant en quelques minutes."Et les taches d'huile sur les routes? Des pneus éclatés, des oiseaux étranges, des trous de la taille d'une coquille et la folie générale des conducteurs. Prétendent-ils l'être? La dette était confiante. Il dit qu'ils pourraient le faire, mais "de combien avez-vous besoin pour augmenter la précision du simulateur?"Les avantages des mondes virtuels de Carcraft ne sont pas qu'ils sont de belles images du monde réel, idéales et photoréalistes. Leur avantage est qu'ils reflètent le monde réel dans des aspects importants pour les robots et leur permettent de parcourir des milliards de kilomètres de plus que les contrôles physiques ne le permettraient. Le logiciel de la machine hôte ne prend pas de décisions, dans un monde similaire au vrai - pour lui, tout est comme s'il prenait des décisions dans le monde réel.Et ce système fonctionne. Le California Department of Transportation oblige les entreprises à déclarer combien de leurs robomobiles ont parcouru des kilomètres en un an, et combien de fois les conducteurs doivent prendre le contrôle. Waymo a non seulement parcouru trois ordres de grandeur de plus que n'importe qui d'autre, mais le nombre de cas de transfert de contrôle diminue rapidement.
Mais ils doivent rechercher non seulement les cas dans lesquels la voiture est coincée. Ils peuvent rechercher des situations dans lesquelles le temps consacré à la solution était trop long ou le freinage trop lent. Tout ce que les programmeurs affinent et étudient, ils simulent pour trouver des problèmes.Stout et le chef du département du logiciel de la dette ont spécifiquement spécifié que la simulation a trois propriétés principales. Premièrement, dans la simulation, vous pouvez parcourir beaucoup plus de kilomètres qu'il ne serait possible avec un parc physique; et l'expérience est bonne. Deuxièmement, ces kilomètres se concentrent sur des interactions intéressantes et complexes, et pas seulement sur des kilomètres ennuyeux. Troisièmement, les cycles de développement logiciel peuvent aller beaucoup plus vite."Le cycle de répétition est extrêmement important pour nous, et le travail effectué sur la simulation nous permet de le compresser de manière drastique", m'a expliqué Dolgov. "Un cycle qui prendrait des semaines pour travailler avec nous pour la première fois, passe maintenant en quelques minutes."Et les taches d'huile sur les routes? Des pneus éclatés, des oiseaux étranges, des trous de la taille d'une coquille et la folie générale des conducteurs. Prétendent-ils l'être? La dette était confiante. Il dit qu'ils pourraient le faire, mais "de combien avez-vous besoin pour augmenter la précision du simulateur?"Les avantages des mondes virtuels de Carcraft ne sont pas qu'ils sont de belles images du monde réel, idéales et photoréalistes. Leur avantage est qu'ils reflètent le monde réel dans des aspects importants pour les robots et leur permettent de parcourir des milliards de kilomètres de plus que les contrôles physiques ne le permettraient. Le logiciel de la machine hôte ne prend pas de décisions, dans un monde similaire au vrai - pour lui, tout est comme s'il prenait des décisions dans le monde réel.Et ce système fonctionne. Le California Department of Transportation oblige les entreprises à déclarer combien de leurs robomobiles ont parcouru des kilomètres en un an, et combien de fois les conducteurs doivent prendre le contrôle. Waymo a non seulement parcouru trois ordres de grandeur de plus que n'importe qui d'autre, mais le nombre de cas de transfert de contrôle diminue rapidement.Waymo 635 868 2015 2016. 124 , 5000 , 0,2 1000 . 424 331 , 272 , 890 , 0,8 1000 .
, , , , : . 20 000 .
L'approche de Waymo ne surprend pas les experts tiers. "Maintenant, vous pouvez mesurer la sophistication de l'équipe travaillant sur l'autonomie - que ce soit un drone ou une voiture - par le sérieux avec lequel ils prennent la simulation", explique Chris Dixon, capital-risqueur chez Andreessen Horowitz, qui a investi dans la société de simulation de l'entreprise Improbable, une société de simulation. "Et Waymo est au sommet, ce sont les plus sophistiqués."J'ai interrogé Sunil Chintakindi, responsable de l'innovation chez Allstate Insurance, sur Waymo. «Sans une infrastructure de simulation fiable, vous ne pouvez pas créer des machines avec les plus hauts niveaux d'autonomie», a-t-il déclaré. "Je ne parlerais même pas à quelqu'un qui pense le contraire.". – Mcity, . , , , « 99% , - ».
, . Waymo. « , – . – : ».
La portée, l'organisation et l'activité du projet Waymo sont surprenantes. J'ai décrit les contrôles structurels effectués par Google, Pengu, y compris 20 000 situations qui sont entrées dans la simulation à partir des contrôles structurels effectués par l'équipe du château. Au début, il ne m'a pas entendu et a commencé à dire que "ces 2000 situations sont un chiffre impressionnant". Je l'ai corrigé: "C'était 20 000 simulations." Il était silencieux.
«20 000», a-t-il dit en y réfléchissant. "C'est impressionnant."En fait, toutes ces 20 000 situations représentent une petite fraction du nombre total de situations vérifiées par Waymo. Ce ne sont que les résultats du traitement des contrôles structurels. Ils ont encore plus de situations tirées de la conduite sur de vraies routes et seulement de leur tête."Ils se débrouillent plutôt bien", a déclaré Peng. «Ils sont loin devant tout le monde dans le développement du quatrième niveau», en utilisant la réduction du jargon pour une voiture entièrement autonome.Peng a exprimé la position des constructeurs automobiles traditionnels. Il a dit qu'ils essayaient de réaliser quelque chose de complètement différent. Ils ne visent pas la pleine autonomie, mais essaient d'ajouter des technologies qui aident à conduire, à «gagner de l'argent», puis à progresser vers la pleine autonomie. Waymo ne peut pas être comparé aux ressources et à la liberté de l'entreprise pour mettre un télémètre laser à 70000 $ sur une machine avec un fabricant comme Chevy, dont les voitures ne devraient pas coûter plus de 40000 $ à vendre sur le marché.«GM, Ford, Toyota et les autres disent:« Permettez-moi de réduire les collisions et les victimes et d'accroître la sécurité pour le grand public. » Leur objectif est complètement différent, explique Peng. "Nous devons penser à des millions de voitures, pas seulement à quelques milliers."Et dans la course à l'autonomie complète, Waymo avait plus d'obstacles qu'elle n'en avait l'habitude - par exemple, Tesla. Chris Gerde est directeur du Stanford Center for Automotive Research. Il y a dix-huit mois, il a dit à mon collègue que Waymo «comprenait beaucoup mieux la profondeur des problèmes et à quel point nous nous rapprochions de tous.» Lorsque je lui ai demandé la semaine dernière s’il le pensait toujours, il a dit que «beaucoup de choses avaient changé».«Les constructeurs automobiles tels que Ford et GM ont exposé leurs voitures et construit leurs ensembles de données routières», dit-il. - Tesla a collecté une énorme quantité de données lors du développement du pilote automatique, étudiant le comportement précis du système dans les conditions dans lesquelles se trouvent leurs clients. Leur capacité à tester tranquillement des algorithmes et leur base de machines en croissance rapide représentent un terrain d'essai incroyable. »Gerde dit que dans le monde des simulations, il a vu plusieurs concurrents avec des programmes assez sérieux. "Je suis sûr qu'il y a beaucoup de possibilités de simulation, mais j'ai vu un certain nombre de très bons exemples. Waymo n'a plus l'air si unique. Ils avaient vraiment un handicap, mais aujourd'hui, de nombreux groupes connaissent des approches similaires. Alors maintenant, la question est de savoir qui le fera mieux. »Ce n'est pas seulement une sorte de démonstration du fonctionnement d'un réseau neuronal qui ressemble à un cerveau. Il s'agit d'un énorme bond en avant dans le développement de l'IA, même pour la société Alphabet, connue pour ses politiques agressives en matière d'IA. Ce n'est pas Google Photos, où l'erreur ne vaut rien. Il s'agit d'un système qui vivra et interagira en toute indépendance avec le monde des gens. Elle comprendra nos règles, communiquera ses désirs, deviendra claire à nos yeux et à nos esprits.Waymo semble s'être quelque peu éloignée du travail avec l'équitation en tant que compétence technique spécifique, et elle continue de travailler avec elle en tant que forme d'activité sociale humaine. Que signifie conduire «normalement» et pas seulement «légalement»? Comment enseigner cette IA?Il s'avère que pour créer une telle IA, vous avez besoin non seulement d'une énorme quantité de données et de l'art des programmeurs. Ce sont des conditions nécessaires mais insuffisantes. Une part de cela est nécessaire pour que les gens se synchronisent avec les voitures, comprennent le monde tel qu'il est. Les chauffeurs du château comprennent ce que signifie être une de ces machines, voir et prendre des décisions telles qu'elles sont. Peut-être que cela fonctionne dans les deux sens - mieux les gens comprennent les machines, mieux les machines comprennent les gens.La mémoire du rond-point à Austin devient une partie du château devient l'ensemble de données de la voiture robotique devient la situation pour Carcraft devient le réseau de simulations devient le nouveau logiciel qui revient finalement à la voiture robotique physique allant à ce rond-point au Texas., , , , . – , , , , , , , .