
Bonjour chère communauté GeekTimes! Après mon long silence, je veux vous présenter mon nouveau projet. OPENTadpole est une application composée d'un éditeur à part entière du système nerveux du têtard de la grenouille et d'une émulation physique du corps du têtard et de l'environnement. La possibilité de créer, de configurer et de modifier la connexion de l'animal à partir de zéro et de voir immédiatement comment votre création se reflète dans son comportement.
Il y a environ un an, une série d'articles consacrés au développement d'un simulateur du système nerveux a été achevée, et l'application développée par moi avait un certain nombre de lacunes, ainsi que le code amateur ne permettait pas d'étendre et de développer la fonctionnalité de l'application. Il est à noter que l'application développée à l'époque m'a permis de démontrer et d'élaborer les mécanismes de base et la plateforme théorique du système de modélisation. Il a été décidé de retraiter le code, à partir d'une représentation plus précise, quelles entités et leurs fonctionnalités seront présentes dans la version finale de l'application.
Tout d'abord, j'ai utilisé mon moteur de jeu Unity préféré pour mon développement, et j'ai connecté l'essence de l'élément neuronal à GameObject, sa logique a été exécutée dans des coroutines, qui, lorsque le réseau s'est étendu, est devenu un problème fatal, l'application s'affaisse terriblement en raison de la connexion étroite de la logique du réseau neuronal avec partie graphique de l'application. Bien sûr, la solution était de séparer la partie graphique de la logique du système, la logique doit être exécutée dans des threads séparés, et la partie graphique ne pourra accéder périodiquement qu'aux éléments du réseau pour afficher les changements qui se produisent. Cette approche offre un autre avantage, la capacité non seulement de surveiller les processus se déroulant dans le réseau, mais aussi d'interagir avec les résultats de ses calculs, donc, par exemple, plonger le réseau dans un certain agent virtuel et observer comment cet agent interagit avec l'environnement externe.
Deuxièmement, il a été décidé de réviser le concept de l'éditeur, malgré le fait que la 3D soit considérée comme une méthode de visualisation plus efficace, j'ai décidé de passer en 2D. J'avais l'habitude de penser qu'une certaine signification clé résidait dans l'organisation tridimensionnelle du système nerveux et, craignant de perdre de vue quelque chose, j'ai cherché une organisation tridimensionnelle de l'éditeur et du système. Mais maintenant, je comprends qu'il suffira d'appliquer la construction d'un éditeur plat avec des niveaux ou des couches, car même le cortex cérébral a une structure en couches, et travailler dans le plan permet à l'utilisateur final de naviguer et d'organiser plus facilement son travail avec l'éditeur, en particulier lorsqu'il s'agit de grands tableaux d'éléments.
Étant donné que je travaille seul et que le développement d'applications dans le domaine de la cybernétique n'est pas mon activité principale, le développement a commencé à aller lentement, et en même temps j'ai voulu montrer comment je peux appliquer mes idées à des animaux avec un système nerveux simple, comme une palourde, un ver ou une sorte d'insecte. J'aime beaucoup le projet OpenWorm pour créer un modèle informatique du ver Caenorhabditis elegans, dont le système nerveux est composé de 302 neurones, et dont la connexion était complètement composée. Le projet se compose de deux parties: la modélisation des propriétés électriques neuronales du système nerveux du ver et la modélisation des propriétés mécaniques de son corps pendant la natation. J'ai appliqué ce concept à mon projet, une référence à laquelle peut être vu dans le nom du projet. Le choix d'un animal simulé a été influencé par l'enregistrement du discours de Roman Matveevich Borisyuk, dans lequel il a parlé d'un projet de simulation du système nerveux d'un têtard de grenouille de deux jours. Inspiré par cette vidéo, j'ai décidé de faire une ramification dans le travail sur un simulateur du système nerveux, qui s'appelait OPENTadpole.
Une plate-forme théorique qui prétend expliquer les mécanismes du système nerveux devrait fonctionner à la fois à l'échelle des systèmes nerveux simples et à l'échelle des systèmes nerveux qui remplissent des fonctions cognitives. Souvent, vous pouvez trouver des commentaires adressés aux auteurs de théories nouvelles sur le fonctionnement du cerveau qu'avant de modéliser des réseaux de neurones à grande échelle, il peut être utile de montrer comment leurs théories peuvent être appliquées à des animaux simples et à leurs systèmes nerveux. Une réponse évasive peut être entendue à ces commentaires selon laquelle les propriétés des neurosystèmes ne se manifestent qu'à une très grande échelle gigantesque, et la vie des créatures primitives n'est pas significative lorsqu'il s'agit de résoudre des problèmes cognitifs. De telles injustices et délires sont devenus pour moi une autre raison de me concentrer pendant un certain temps sur la vie et le comportement du têtard grenouille de deux jours.
Animaux cybernétiques avec le système nerveux
Bien sûr, l'homme a déjà créé de nombreux mécanismes cybernétiques qui imitent certains aspects du comportement animal, par exemple, les canards mécaniques de Vaucanson, qui non seulement agitent leurs ailes, picorent une nourriture dispersée, mais ont également une sorte de système digestif avec tous les processus qui l'accompagnent. Mais les animaux artificiels avec un système nerveux similaire à son homologue biologique sont assez rares. Faisons un bref aperçu du monde des animaux cybernétiques afin qu'il devienne clair d'où vient tant d'audace pour appeler votre têtard le premier animal cybernétique avec un système nerveux artificiel.
Et nous ne commencerons pas avec un animal, mais avec une personne légendaire - Henry Markram. Henry Markam est un scientifique, connu de beaucoup comme un pionnier dans l'étude des connexions synaptiques, il a été l'un des premiers à commencer à étudier systématiquement une version cohérente de la règle Hebb. Mais Henry Markram a acquis une réelle renommée en tant que créateur de la simulation cérébrale la plus chère au monde. Le scientifique et ses collègues disposent non seulement du plus gros financement jamais alloué à ces fins, mais également des ressources informatiques les plus puissantes du
supercalculateur Blue Gene d'IBM. Le nom de l'ordinateur a donné le prénom au projet: «Blue Brain Project», en 2013 il a été renommé «The Human Brain Project». Malgré le fait que le nom du projet fasse désormais référence au cerveau humain, des travaux sont en cours sur un modèle d'un petit fragment du cortex du cerveau de la souris. Les chefs de projet ont de grands projets, à commencer par un petit fragment du cerveau de la souris pour atteindre un modèle complet du cerveau humain. En 2009, Markam, le commissaire du projet, a promis que dix ans plus tard, une simulation informatique de l'ensemble du cerveau humain apparaîtrait. Beaucoup considèrent Henry Markram comme un charlatan, en effet, si vous écoutez ses discours, alors ils se concentrent davantage sur les riches investisseurs qui connaissent mal les neurosciences que sur leurs collègues scientifiques.
Dans toute l'histoire du projet, en plus de beaux matériaux graphiques, de guirlandes de neurones clignotantes, il y a une étude pratiquement utile. Une vingtaine de modèles 3D de certains types de neurones ont été créés qui reproduisent complètement la topologie des vrais neurones, en tenant compte de tous les virages et branches des dendrites. Ensuite, une petite région du cortex a été configurée dans laquelle les modèles de neurones préparés étaient situés, selon certaines règles, mais les modèles de neurones ont été choisis au hasard, puis des statistiques ont été collectées à partir du modèle obtenu: où les dendrites se croisent, à quelle distance du corps cellulaire, quel type de contacts.
Les statistiques obtenues ont été comparées à des statistiques similaires, mais obtenues à partir du système nerveux biologique et ont obtenu des résultats très importants: la formation de 80% des connexions synaptiques dans le cortex est sujette au hasard. C'est-à-dire là où il y a des dendrites, des axones, des collatéraux en pleine croissance, une synapse peut se former et aucun marqueur chimique. Bien sûr, dans certains cas, la sélectivité de la formation des synapses n'est pas exclue, et il est également impossible de tirer une conclusion sur le caractère aléatoire de la qualité des connexions. Une synapse peut se former par hasard au cours de la croissance d'un neurone, mais sa force (poids) peut être déterminée par l'activité vitale du système nerveux et de l'animal.
Bien qu'il ne soit pas possible de parler d'une souris virtuelle cybernétique dans le cadre du Human Brain Project, un modèle à grande échelle du cerveau de la souris est encore loin. Grâce aux ressources d'IBM, un autre chercheur Dharmendra Mohda a annoncé en 2009 le lancement d'un projet de création d'une simulation numérique d'un cerveau félin. Cette déclaration a provoqué beaucoup d'indignation chez Markram, ce qui s'est traduit par une lettre ouverte en colère au technologue en chef d'IBM. Personne n'aime la compétition, mais nous préférerions la voir dans la lutte contre les chats et les souris virtuels plutôt que pour attirer l'attention des têtes d'IBM, têtes d'imitations coûteuses. Après tant d'années, des changements et développements importants dans le domaine des imitations du cerveau des mammifères ne se sont pas produits.
OpenWorm est un projet très célèbre pour créer un modèle de simulation d'un nématode (ver rond) de l'espèce Caenorhabditis elegans, ce ver est remarquable par le fait qu'il s'agit de la seule espèce animale pour laquelle une connexion complète de son système nerveux est composée de 302 neurones et environ 7000 connexions synaptiques. Même pour un système nerveux aussi petit que c. Les élégans qui se connectent se sont révélés être une œuvre titanesque. Tout d'abord, le ver a été soumis à une procédure complexe - la microscopie en série, créant une série de photographies de coupes transversales du corps. Il a fallu réaliser des coupes très fines de quelques microns puis utiliser un microscope électronique pour créer des images haute résolution. Avec un ver adulte de 1 à 2 mm de long, cela s'est avéré être une tâche difficile, l'atlas de photographies disponible est composé de 3 vers, puisque le système nerveux c. elegans a une stabilité et une répétabilité étonnantes. Deuxièmement, il a fallu plus de sept ans d'étude minutieuse des images, l'équipe de scientifiques, pour compiler une carte des connexions du système nerveux, des ajustements sont encore en cours dans la base de données résultante.
Malheureusement, il est impossible de déterminer le type et la force des connexions synaptiques sur la photo; en conséquence, nous avons une description des connexions sans aucune idée de leur objectif fonctionnel.
La prochaine étape pour comprendre la nature du système nerveux c. elegans devient une tentative de créer une simulation informatique d'un ver. Le modèle numérique est pratique en ce sens que l'expérimentateur peut modifier et sélectionner les paramètres de ses éléments, de sorte que le travail de l'ensemble du modèle est comparable à un analogue biologique, ce qui permet d'identifier certaines lois de l'organisation et du fonctionnement du système nerveux d'un organisme vivant en utilisant la sélection empirique. Bien sûr, sans théorie générale du système nerveux, sans plate-forme théorique, une telle recherche de lois est une tâche très difficile, dont la solution peut naturellement s'éterniser.
Le projet a acquis une renommée particulière lors
du kickstarter de l'
entreprise en 2014 . La communauté OpenWorm est très fructueuse: un
atlas tridimensionnel du nématode est créé , dans lequel le système nerveux est élaboré en détail - chaque neurone est désigné; système créé et largement développé de modélisation et de visualisation
geppetto ; simulation des propriétés mécaniques du corps du ver et de l'environnement extérieur - Sibernetic, sur lequel nos compatriotes travaillent. Mais les nématodes cybernétiques en mouvement libre contrôlés par le système nerveux ne sont pas encore apparus. Certains réflexes simples liés à la locomotion (mouvement) et au retrait lorsqu'ils touchent l'avant du corps sont modélisés, mais la plupart des circuits nerveux et le comportement des nématodes qui leur sont associés restent inexplorés.
L'une des dernières vidéos sibernétiques de la chaîne d'Andrei Palyanov, nématode nageant dans deux environnements différents, le contrôle est effectué à l'aide de signaux périodiques simples, sans la participation de neurones virtuels.
Le projet suivant m'a fait forte impression, c'est après avoir regardé la vidéo suivante avec un discours de Roman Matveevich Borisyuk que j'ai décidé de choisir un têtard comme animal modèle dans mon projet.
Le projet peu connu
tadpoles.org.uk , explique modestement certains des principes et lois fondamentaux de l'organisation du système nerveux. Les scientifiques ont créé un modèle pour le développement du système nerveux, sa formation dans la période initiale de développement de l'animal. Tout d'abord, un modèle est généré: les dendrites et les axones se développent à partir des neurones selon certaines règles qui prennent en compte certains paramètres du corps du têtard avec un certain degré de probabilité affectant la direction de croissance des processus, puis des synapses se forment aux points de contact entre les dendrites et les axones de différentes cellules. Au final, le modèle peut être activé et il démontrera une activité similaire à l'activité du système nerveux du têtard vivant dans la partie responsable de la natation.
Il s'avère que pour que le système nerveux se forme avec tous les réflexes et mécanismes congénitaux, il est nécessaire que des instructions assez simples soient suivies par les cellules nerveuses. En fonction de son emplacement et de son affiliation à certains groupes de cellules - les ganglions, la cellule doit développer ses dendrites et ses axones dans certaines directions, ainsi que former des contacts synoptiques avec les cellules et leurs processus situés à certaines distances du corps de la cellule, sans aucune sélectivité. L'erreur qui en résulte dans la structure du réseau neuronal due à des écarts dans la direction de croissance des processus lors du franchissement d'obstacles possibles est compensée par la présence excessive de neurones et de processus.
Pour l'acte de nager, la contraction ondulatoire des muscles le long du corps, le têtard a besoin d'environ 1 500 neurones, pour un nématode de moins de trois cents. Le têtard de la grenouille est un animal plus complexe et évolutif par rapport au ver rond, et l'augmentation du nombre de neurones ici est liée, non pas à la nécessité d'augmenter la puissance de calcul, mais à la fiabilité du système et à la compensation de l'inexactitude des neurones en tant qu'éléments de calcul. Certains chercheurs attribuent les propriétés des ordinateurs quantiques ou des calculatrices sophistiquées aux neurones individuels, mais cela est fondamentalement faux, un neurone est, tout d'abord, une cellule biologique, avec son erreur inhérente de travail et d'instabilité. Par conséquent, cela n'a pas de sens de passer du temps à reconstruire les 86 milliards de neurones du cerveau humain; il serait approprié d'emballer structurellement des neurones dans certains neuroéléments qui effectuent des tâches fonctionnelles assignées à des groupes de neurones.
L'essentiel est la bonne approche
Vous pouvez consacrer beaucoup de temps, d'argent et d'efforts à la création de modèles complexes de systèmes complexes sans obtenir de résultats pratiquement significatifs si la base n'est pas établie pour une idée précise du fonctionnement de chaque élément du système et des fonctions que ces éléments remplissent dans l'ensemble du système dans son ensemble. Idéalement, vous devez connaître le résultat du modèle avant de commencer à le recréer, c'est ce qui détermine le succès dans la résolution des tâches, et non la présence d'un superordinateur et une grande aide financière.
Maintenant, une grande attention est accordée aux réseaux de neurones, qui démontrent une grande efficacité et de grands avantages pratiques. Initialement, les réseaux neuronaux étaient positionnés comme certains modèles de réseaux neuronaux biologiques, mais au fil du temps et du développement de la neurobiologie, il est devenu clair que seul le nom avait un commun entre le neurone formel utilisé en NS et le biologique. Les réseaux de neurones modernes sont un puissant outil mathématique pour l'analyse statistique. C'est ce positionnement de la NS dans son développement qui donnera une plus grande efficacité. Analyse statistique et traitement d'une grande quantité de données, pas un modèle du système nerveux. Il est possible qu'une sorte d'intelligence artificielle apparaisse sur la plate-forme NS, mais si nous nous efforçons de créer une intelligence de type humain, nous devons prêter attention aux réseaux neuronaux biologiques.
Les réseaux de neurones ont déjà prouvé leur grande efficacité dans la résolution de certains problèmes par rapport aux humains, et il est souhaitable que leur développement se poursuive. En tant que chercheur sur le cerveau, je me serais davantage reposé sur une machine pilotée par un réseau neuronal bien développé que sur une machine pilotée par un modèle virtuel de tissu nerveux similaire au biologique. Le fait est que les mécanismes du cerveau contiennent initialement des éléments d'imprécision et de perception limitée, qui conduisent naturellement à des erreurs, mais d'un autre côté, ces mêmes mécanismes offrent un grand potentiel de créativité et d'adaptation.
Le modèle mathématique dominant utilisé dans la création de systèmes neuronaux biologiquement similaires est le modèle Hodgkin-Huxley, décrit en 1952. D'une manière ou d'une autre, ce modèle est utilisé à la fois dans le Human Brain Project, dans OpenWorm et dans tadpoles.org.uk. Le modèle Hodgkin-Huxley est un système d'équations décrivant les oscillations de charge qui se produisent à la surface d'une membrane neuronale, le système d'équations a été adopté et adapté de l'ingénierie électrique en termes de descriptions des auto-oscillations dans un circuit oscillant électrique. Alan Lloyd Hodgkin et Andrew Huxley ont ajouté quelques éléments supplémentaires et un certain nombre de coefficients au système d'équations, en les choisissant afin que le résultat de leur travail soit comparé aux données expérimentales obtenues par eux lors de l'étude des axones de calmar.
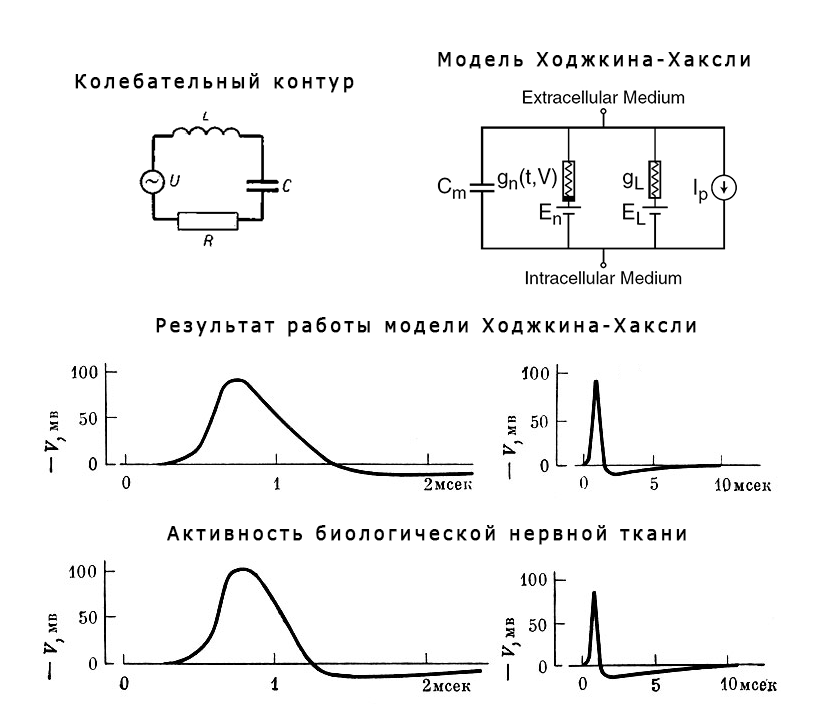 Le système d'équations de Hodgkin-Huxley décrit un changement de potentiel à un seul point de la membrane, pour obtenir une image de la propagation de l'excitation à travers la membrane et les processus d'un neurone, vous pouvez diviser le modèle de neurone en quelques primitives, ou sélectionner des points équidistants et considérer le système d'équations à chaque point. Le modèle de Hodgkin-Huxley est très réaliste, démontre la distribution du potentiel d'action sur le corps du peuplement, mais le modèle nécessite de grandes ressources de calcul.Dans mon travail, j'effectue une sorte de réingénierie du système nerveux, je mets en évidence ce qui est important et je rejette ou simplifie certains processus et phénomènes associés. La nature du système nerveux et des cellules nerveuses est très diversifiée et complexe, il existe de nombreuses réactions chimiques, processus et phénomènes intracellulaires, mais vous ne devez pas tout transférer au modèle, vous devez d'abord comprendre la signification et la fonction du phénomène, sinon ce sera une complication insignifiante du modèle.Quelle est la signification fonctionnelle de la propagation du potentiel d'action le long de la membrane d'un neurone? - Transfert d'informations d'une partie d'une cellule nerveuse à une autre. Les informations selon lesquelles une cellule nerveuse a été activée par des récepteurs ou des synapses devraient aller aux extrémités de l'axone, dépassant toute sa longueur, qui peut atteindre jusqu'à un mètre dans le corps humain. Qu'est-ce qui est important dans ce processus? - Le temps écoulé entre le début de l'activation et le transfert d'informations à ce sujet vers la zone cible du tissu nerveux. En moyenne, la vitesse de propagation du potentiel d'action est de 1 m / s, elle dépend de divers facteurs, par exemple, du degré de myélinisation axonale. Par conséquent, dans des conditions différentes, le temps de retard peut être différent. Le modèle de Hodgkin-Huxley simule de façon très réaliste le processus de propagation d'une impulsion nerveuse le long d'une membrane,mais ces détails sont-ils nécessaires lors de la création d'un modèle fonctionnel du système nerveux?Si nous pouvons simplifier quelque chose, cela signifie que nous comprenons quelque chose. L'idée de simplification en lois et fonctions simples, l'allocation du principal et sa séparation du secondaire, peut être qualifiée d'approche fonctionnelle.
Le système d'équations de Hodgkin-Huxley décrit un changement de potentiel à un seul point de la membrane, pour obtenir une image de la propagation de l'excitation à travers la membrane et les processus d'un neurone, vous pouvez diviser le modèle de neurone en quelques primitives, ou sélectionner des points équidistants et considérer le système d'équations à chaque point. Le modèle de Hodgkin-Huxley est très réaliste, démontre la distribution du potentiel d'action sur le corps du peuplement, mais le modèle nécessite de grandes ressources de calcul.Dans mon travail, j'effectue une sorte de réingénierie du système nerveux, je mets en évidence ce qui est important et je rejette ou simplifie certains processus et phénomènes associés. La nature du système nerveux et des cellules nerveuses est très diversifiée et complexe, il existe de nombreuses réactions chimiques, processus et phénomènes intracellulaires, mais vous ne devez pas tout transférer au modèle, vous devez d'abord comprendre la signification et la fonction du phénomène, sinon ce sera une complication insignifiante du modèle.Quelle est la signification fonctionnelle de la propagation du potentiel d'action le long de la membrane d'un neurone? - Transfert d'informations d'une partie d'une cellule nerveuse à une autre. Les informations selon lesquelles une cellule nerveuse a été activée par des récepteurs ou des synapses devraient aller aux extrémités de l'axone, dépassant toute sa longueur, qui peut atteindre jusqu'à un mètre dans le corps humain. Qu'est-ce qui est important dans ce processus? - Le temps écoulé entre le début de l'activation et le transfert d'informations à ce sujet vers la zone cible du tissu nerveux. En moyenne, la vitesse de propagation du potentiel d'action est de 1 m / s, elle dépend de divers facteurs, par exemple, du degré de myélinisation axonale. Par conséquent, dans des conditions différentes, le temps de retard peut être différent. Le modèle de Hodgkin-Huxley simule de façon très réaliste le processus de propagation d'une impulsion nerveuse le long d'une membrane,mais ces détails sont-ils nécessaires lors de la création d'un modèle fonctionnel du système nerveux?Si nous pouvons simplifier quelque chose, cela signifie que nous comprenons quelque chose. L'idée de simplification en lois et fonctions simples, l'allocation du principal et sa séparation du secondaire, peut être qualifiée d'approche fonctionnelle.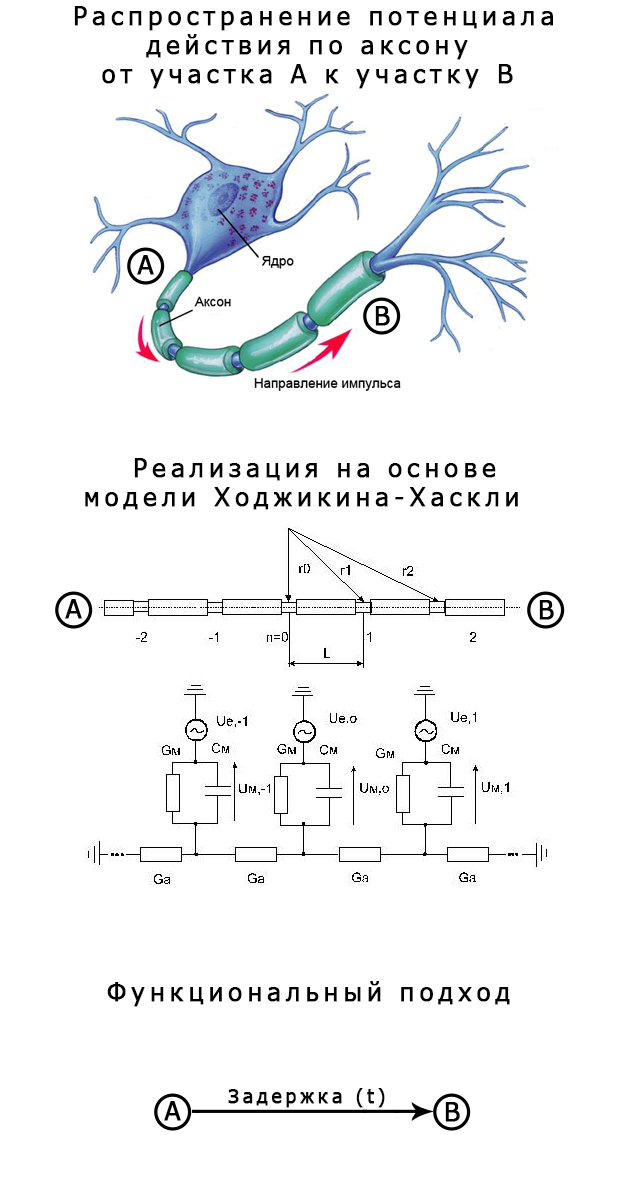 Si vous essayez de simuler le cerveau humain avec les 86 milliards de neurones, en répétant la topologie des processus, et même en calculant mal le système d'équations de Hodgkin-Huxley dans une grille dense de points à la surface des neurones, alors toutes les ressources informatiques de la planète Terre ne seront pas suffisantes. Et en faisant des prédictions sur l'apparition de ces modèles, vous pouvez vous concentrer sur vingt ans à l'avance, et après ces années, encore vingt ans. Eh bien, la propagation du potentiel d'action n'est pas tout, il faut encore comprendre la logique de l'interaction des neurones, pour résoudre ce problème, pour commencer, je me suis concentré sur des systèmes nerveux assez simples, comme le système nerveux d'un ver ou d'un têtard de grenouille.
Si vous essayez de simuler le cerveau humain avec les 86 milliards de neurones, en répétant la topologie des processus, et même en calculant mal le système d'équations de Hodgkin-Huxley dans une grille dense de points à la surface des neurones, alors toutes les ressources informatiques de la planète Terre ne seront pas suffisantes. Et en faisant des prédictions sur l'apparition de ces modèles, vous pouvez vous concentrer sur vingt ans à l'avance, et après ces années, encore vingt ans. Eh bien, la propagation du potentiel d'action n'est pas tout, il faut encore comprendre la logique de l'interaction des neurones, pour résoudre ce problème, pour commencer, je me suis concentré sur des systèmes nerveux assez simples, comme le système nerveux d'un ver ou d'un têtard de grenouille.Développement
Vous ne vous attendez pas à ce que l'utilisation du moteur de jeu dans les modèles scientifiques puisse provoquer un sentiment de vigilance dans le public? - une question similaire m'a été posée par un merveilleux internaute. Oui, je n'ai recouru à aucun système de normalisation, je n'ai pas utilisé les langages pour décrire les structures biologiques, juste pour la raison qu'il faut beaucoup de temps pour étudier le matériel d'accompagnement. Je ne suis pas un scientifique, mais un bang ordinaire avec une vie dynamique et animée, mais avec beaucoup d'idées, de créativité et un désir de mise en œuvre. Par conséquent, le temps entre la vie de famille, le travail et le sommeil est donné à la modélisation par les moyens disponibles. Le moteur de jeu Unity n'est qu'un outil dans mon travail, et il est très bon et pratique en termes de visualisation.L'ensemble du projet OPENTadpole se compose de seulement deux scènes: un éditeur de connexion et une simulation de l'environnement. Il n'y a pas eu de problème sérieux avec l'éditeur pendant le processus de développement, car il y avait déjà de l'expérience sur la version précédente du simulateur du système nerveux .La tâche principale à ce stade était la séparation de la mise en œuvre de la logique des éléments neuronaux et de la visualisation, qui a été mise en œuvre.À l'étape suivante, je me suis tourné vers un simulateur de l'environnement et j'ai rapidement implémenté le corps de têtard à partir des composants standard de Unity. Le corps du têtard est composé de 9 segments, reliés entre eux par des articulations, des paires cinématiques virtuelles et une paire de muscles virtuels des deux côtés. Les muscles virtuels ont une certaine élasticité, qui fournit une élasticité à tout le corps. La fonction musculaire était subordonnée au système nerveux virtuel, qui est chargé via des fichiers de sauvegarde, communs à l'éditeur et à la simulation de l'environnement.
La fonction musculaire était subordonnée au système nerveux virtuel, qui est chargé via des fichiers de sauvegarde, communs à l'éditeur et à la simulation de l'environnement.Têtard sphérique sous vide .gif La poursuite du développement a nécessité l'ajout d'un système simulant les propriétés physiques du milieu, ce qui n'était pas une tâche facile pour moi. À un moment donné, j'ai même regretté que la sauvagine ait été choisie comme animal modèle. Et bien sûr, le grand avantage d'utiliser un moteur de jeu très populaire est que de nombreux modules complémentaires, bibliothèques et ressources ont été créés et développés pour lui. J'ai essayé de travailler avec plusieurs bibliothèques, mais LiquidPhysics2D s'est avéré être le meilleur. Il n'y a pas de lien officiel vers la bibliothèque, le site de la société de développement ne fonctionne plus, mais vous pouvez le trouver si vous le souhaitez, google pour vous aider. Cette bibliothèque est basée sur le célèbre moteur Box2D et est très optimisée et facile à utiliser, avec de nombreux exemples, j'ai donc réussi à l'utiliser, même si j'ai dû mettre beaucoup de persévérance.Il a fallu refaire le corps du têtard à l'aide des éléments de la bibliothèque.Le calcul en temps réel des propriétés physiques d'un liquide nécessite une puissance de calcul élevée.Par conséquent, même en utilisant une bibliothèque bien optimisée, un fonctionnement stable de l'application peut être obtenu en se limitant à quelques milliers de particules.Je voulais voir un têtard flottant librement dans une zone assez grande; un espace limité fort ne me permettrait pas d'apprécier pleinement le modèle. Il a été décidé de créer et d'éliminer dynamiquement les particules dans la zone du têtard environnant, il était nécessaire de diviser l'espace en zones carrées spéciales et de réguler l'apparence et l'élimination des particules en fonction de la position du têtard.Afin d'éviter que l'utilisateur ne soit gêné par les carrés dansants, la visibilité des particules était limitée, ce qui entraînait une sorte d'aura affichant des particules autour du corps du têtard, qui peut être désactivée en appuyant sur F12.Résultat
Le but de ces projets est d'identifier quelques règles générales pour l'organisation du système nerveux et les lois d'interaction des neurones qui déterminent le comportement de l'animal. Le projet OPENTadpole à cet égard peut être qualifié de complètement achevé, chacun peut s'essayer dans le rôle du Créateur et remplir le corps vide du têtard virtuel avec le système nerveux à partir de zéro, lui permettant de se déplacer activement dans l'espace et d'interagir avec l'environnement, et de vivre dans son propre monde strict et limité. En effet, alors que le développement était en cours, j'ai reçu beaucoup d'émotions positives, voyant comment mes actions rendaient le comportement du têtard plus vivant.L'archive avec l'application contient un excellent guide coloré qui décrit les principaux aspects du programme, ainsi que plusieurs exemples de sauvegarde qui vous aideront à comprendre les principes du système nerveux (lien à la fin de l'article). Le modèle est basé sur les mêmes principes que ceux dont j'ai parlé dans mes publications précédentes ( partie 1 , partie 2 ), et il n'y a eu aucune spéculation sur l'interaction électromagnétique des neurones, seulement celle sur laquelle les grands esprits ont écrit et reçu des prix Nobel. Tout dans le cadre de la doctrine scientifique, mais incarné sous une nouvelle forme concise, peut être utilisé comme outil pédagogique.Natation
La chaîne neuronale responsable de la natation est basée sur un générateur d'activité ordonné, de tels générateurs se retrouvent dans tous les systèmes nerveux des animaux simples, ce sont des chaînes fermées de neurones capables de générer une excitation rythmique sans rétroaction.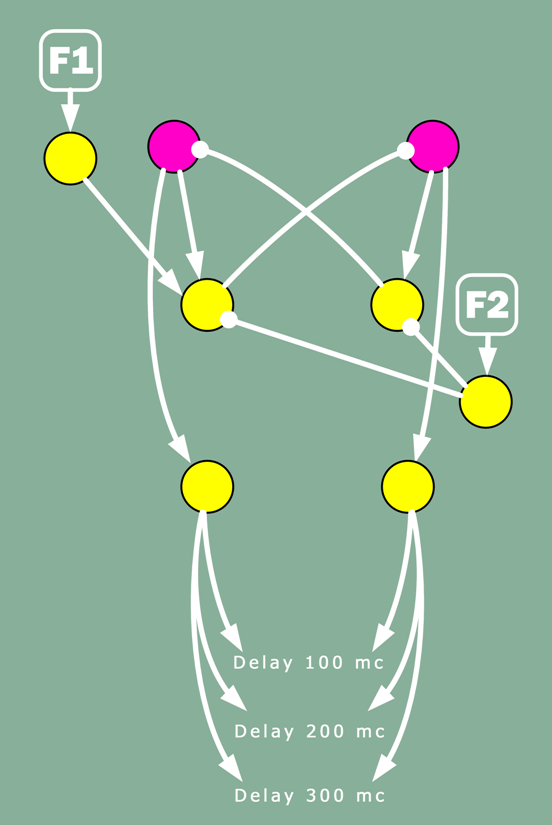 Le schéma du générateur d'activité ordonnée du têtard de la grenouille est représenté par quatre neurones situés symétriquement dans le corps du têtard. Deux neurones (dIN, violet) dans ce circuit ont une particularité, ils sortent de l'état d'inhibition, créant un pic d'activité. Chacun de ces neurones active un neurone inhibiteur (inhibiteur), qui à son tour a un effet croisé sur le neurone dIN. Ainsi, un certain circuit de circulation de l'excitation nerveuse est obtenu. Il est possible de démarrer ce générateur en utilisant une seule activation de l'un des neurones générateurs, et il est possible d'arrêter le fonctionnement du générateur si l'activation de l'un des neurones en chaîne est empêchée par un effet inhibiteur plus fort.Afin de mener des expériences dans le système OPENTadpole, 4 clés de récepteur F1, F2, F3 et F4 ont été attribuées, dans les exemples de sauvegarde, le générateur démarre le récepteur F1, l'activité en elle a été supprimée par F2.L'activité du générateur est répartie alternativement le long du côté droit et gauche le long du corps du têtard, à chaque motoneurone à partir de la tête jusqu'à la pointe de la queue, l'excitation s'accompagne d'un retard de 100 millisecondes, cela est dû au fait que la propagation de l'excitation a une vitesse finie. La vitesse de propagation de l'excitation dans différents axones peut varier, dans les axones avec un degré de myélinisation plus élevé (une couche plus épaisse de myéline), la vitesse sera plus élevée. Par exemple, dans le corps du calmar, il y a certains des plus grands axones, atteignant presque 1 mm de diamètre, qui participent au réflexe protecteur d'emballement, lorsque le calmar, s'éloignant du danger possible avec un champignon caudal rapide et puissant, fuit un danger possible, un taux de transmission du signal élevé est requis ici.Il existe de nombreux générateurs similaires dans le système nerveux du têtard biologique; ils sont situés le long du corps et sont connectés en série les uns aux autres. Si un seul générateur était présent dans le système nerveux du têtard, cela créerait un gros risque, des dommages à un neurone, ou même à une synapse de ce circuit, entraîneraient la perte de la capacité de se déplacer. Pour la simulation informatique, il n'y a pas de tels problèmes, par conséquent, un modèle suffit pour le modèle.
Le schéma du générateur d'activité ordonnée du têtard de la grenouille est représenté par quatre neurones situés symétriquement dans le corps du têtard. Deux neurones (dIN, violet) dans ce circuit ont une particularité, ils sortent de l'état d'inhibition, créant un pic d'activité. Chacun de ces neurones active un neurone inhibiteur (inhibiteur), qui à son tour a un effet croisé sur le neurone dIN. Ainsi, un certain circuit de circulation de l'excitation nerveuse est obtenu. Il est possible de démarrer ce générateur en utilisant une seule activation de l'un des neurones générateurs, et il est possible d'arrêter le fonctionnement du générateur si l'activation de l'un des neurones en chaîne est empêchée par un effet inhibiteur plus fort.Afin de mener des expériences dans le système OPENTadpole, 4 clés de récepteur F1, F2, F3 et F4 ont été attribuées, dans les exemples de sauvegarde, le générateur démarre le récepteur F1, l'activité en elle a été supprimée par F2.L'activité du générateur est répartie alternativement le long du côté droit et gauche le long du corps du têtard, à chaque motoneurone à partir de la tête jusqu'à la pointe de la queue, l'excitation s'accompagne d'un retard de 100 millisecondes, cela est dû au fait que la propagation de l'excitation a une vitesse finie. La vitesse de propagation de l'excitation dans différents axones peut varier, dans les axones avec un degré de myélinisation plus élevé (une couche plus épaisse de myéline), la vitesse sera plus élevée. Par exemple, dans le corps du calmar, il y a certains des plus grands axones, atteignant presque 1 mm de diamètre, qui participent au réflexe protecteur d'emballement, lorsque le calmar, s'éloignant du danger possible avec un champignon caudal rapide et puissant, fuit un danger possible, un taux de transmission du signal élevé est requis ici.Il existe de nombreux générateurs similaires dans le système nerveux du têtard biologique; ils sont situés le long du corps et sont connectés en série les uns aux autres. Si un seul générateur était présent dans le système nerveux du têtard, cela créerait un gros risque, des dommages à un neurone, ou même à une synapse de ce circuit, entraîneraient la perte de la capacité de se déplacer. Pour la simulation informatique, il n'y a pas de tels problèmes, par conséquent, un modèle suffit pour le modèle.Manoeuvres
Le têtard a la capacité de changer la direction de sa nage, d'effectuer certaines manœuvres, pour cela, au moment de la nage, il faut que les muscles du côté vers lequel le têtard a l'intention de se tourner se contractent de manière plus ou plus intensive, tout en conservant la même fréquence de contractions.Les signaux dans le système nerveux, pour tous les animaux, peuvent être considérés comme discrets. L'amplitude du potentiel d'action est toujours et partout stable, le signal lui-même a un caractère court et hérissé, mais en même temps, nous pouvons facilement changer le degré de tension dans les muscles, de manière assez fluide et précise, tout est déterminé par la fréquence des commandes envoyées aux groupes musculaires. Plus les impulsions sont fréquentes, plus la contraction musculaire est forte. Ainsi, contrôlant la fréquence des impulsions d'activation, le système nerveux contrôle les groupes musculaires et il est suffisamment flexible.Un mécanisme simple de sommation temporelle d'un neurone permet de contrôler facilement la fréquence des impulsions en modifiant le seuil de l'additionneur. Le niveau de seuil de sommation dans un neurone biologique est déterminé par sa configuration générale, la taille des neurones, le nombre et la densité des récepteurs sur la membrane postsynaptique, le nombre et la densité des canaux ioniques sur la membrane, en général, à partir du métabolisme des cellules nerveuses. Et tous ces paramètres peuvent changer activement dans une cellule vivante sous l'influence d'un effet modulateur sur elle.Nous sommes depuis longtemps habitués au fait que lorsqu'ils décrivent le travail du système nerveux, ils ne parlent que de deux types d'effets synaptiques: stimulants et inhibiteurs. Mais en fait, c'est une inexactitude fatale qui fausse la compréhension des principes du système nerveux. Dans son travail, le scientifique américain neuroscientifique Eric Kandel a décrit le mécanisme moléculaire des effets synaptiques conduisant à des changements métaboliques dans la cellule et la synapse, pour lesquels en 2000 il a reçu le prix Nobel. Les neurones modulants et les mécanismes modulants sont utilisés depuis longtemps dans la description des principes du système nerveux, car ces mécanismes jouent un rôle important dans son travail.Le modèle distingue un type distinct de connexion synaptique, qui peut affecter le niveau de seuil de l'additionneur, pendant un certain temps - la synapse modulante. Si vous modulez, abaissez le seuil de l'additionneur sur un neurone modulé intercalé (vert dans le schéma suivant), cela conduira à une augmentation de sa sensibilité, et lors de l'activation, il ne générera pas un seul pic, mais toute une série d'impulsions. Ainsi, en transformant le signal du générateur, il est possible d'effectuer des manœuvres, des virages en nageant. Si de cette manière les neurones des deux côtés sont modulés en même temps, alors le têtard nagera simplement plus activement.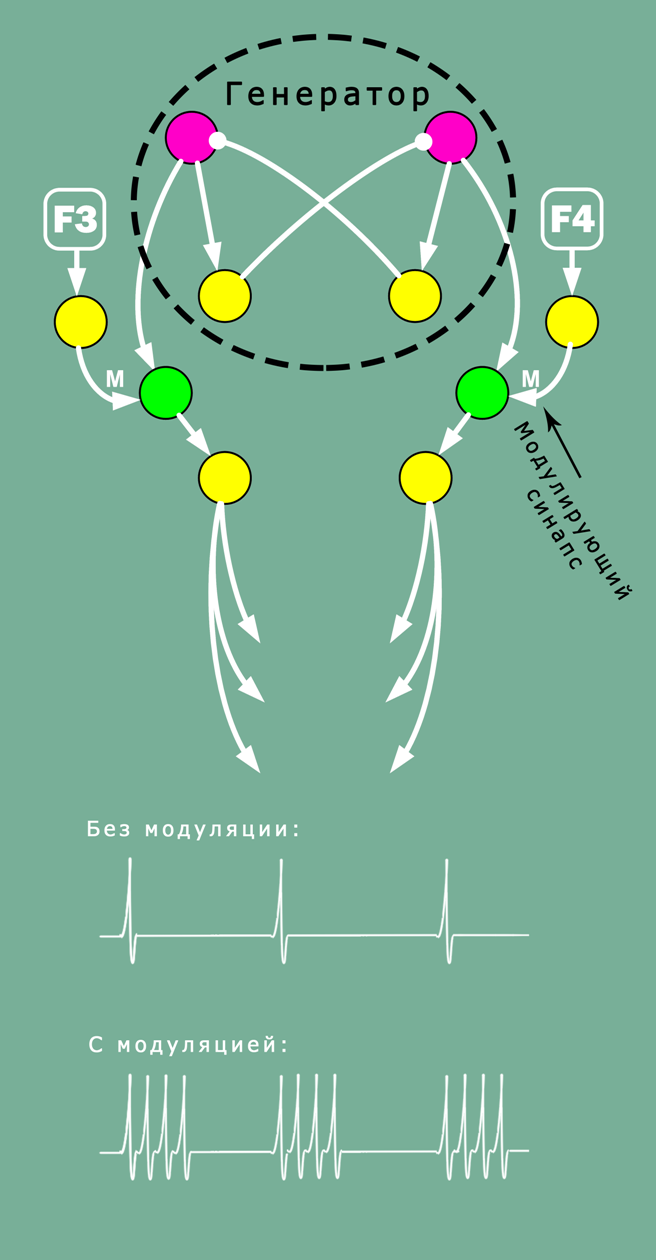 Le sujet de la modulation dans le système nerveux est très étendu, malgré le fait que dans ce modèle je me limite à contrôler le niveau du seuil d'activation. Étant donné les changements qui peuvent survenir dynamiquement dans le système nerveux, on peut dire que la modulation peut être très diverse, y compris les changements dans la force des synapses, les changements de plasticité, le degré de dépendance, le temps de retard synoptique et les propriétés métaboliques de la cellule.Le contrôle à l'aide de synapses modulantes, ainsi que le contrôle du fonctionnement du générateur, ont permis de mettre en œuvre certains réflexes de protection, par exemple, commencer à nager lorsque le têtard touche la tête et s'écarter dans la direction opposée du contact, ce qui permet au têtard de nager librement dans l'aquarium virtuel, naviguant de ses murs.
Le sujet de la modulation dans le système nerveux est très étendu, malgré le fait que dans ce modèle je me limite à contrôler le niveau du seuil d'activation. Étant donné les changements qui peuvent survenir dynamiquement dans le système nerveux, on peut dire que la modulation peut être très diverse, y compris les changements dans la force des synapses, les changements de plasticité, le degré de dépendance, le temps de retard synoptique et les propriétés métaboliques de la cellule.Le contrôle à l'aide de synapses modulantes, ainsi que le contrôle du fonctionnement du générateur, ont permis de mettre en œuvre certains réflexes de protection, par exemple, commencer à nager lorsque le têtard touche la tête et s'écarter dans la direction opposée du contact, ce qui permet au têtard de nager librement dans l'aquarium virtuel, naviguant de ses murs.Où naviguer?
Le têtard a appris à nager et peut choisir librement une direction, mais pour choisir cette direction, il a besoin d'un objectif, et un tel objectif est justifié, peut-être de la nourriture. Pour détecter les aliments, le têtard possède deux récepteurs spéciaux de l'odorat, séparés par une ligne spéciale, le «pont nasal», à travers lequel le récepteur ne peut pas détecter la présence d'aliments. Plus la nourriture est proche, plus le récepteur est souvent activé en tenant compte du carré de la distance. Bien sûr, un tel modèle d'odorat est une forte simplification, mais dans le cadre de la simulation, il est tout à fait acceptable.Dans les exemples, les signaux de deux récepteurs passent d'abord par une chaîne de neurones dans laquelle se produit une suppression mutuelle, puis exercent un effet modulateur sur les motoneurones, contrôlant le mouvement du têtard.
Bien sûr, un tel modèle d'odorat est une forte simplification, mais dans le cadre de la simulation, il est tout à fait acceptable.Dans les exemples, les signaux de deux récepteurs passent d'abord par une chaîne de neurones dans laquelle se produit une suppression mutuelle, puis exercent un effet modulateur sur les motoneurones, contrôlant le mouvement du têtard.Recherche de nourriture .gif Besoins
Je voulais que le comportement du têtard soit un peu plus complexe que de simplement suivre la nourriture, il a donc été décidé de simuler les mécanismes des besoins. Tout d'abord, c'est le besoin de nourriture, la faim est un désir naturel de consommer la source d'énergie nécessaire au mouvement et au développement du corps. Et naturellement, la faim devrait avoir un degré différent, si l'animal est plein, alors la nourriture ne devrait pas l'intéresser beaucoup. Deuxièmement, un besoin non moins fondamental de conservation de l'énergie, né très tôt sur le plan de l'évolution et revêt une importance capitale dans le comportement de tous les animaux. Être paresseux est tissé dans notre essence, cela nous permet d'optimiser notre comportement en termes de consommation d'énergie, celui qui obtient le résultat avec moins de gaspillage de ressources énergétiques a plus de succès.
Pour répondre à ces deux besoins, deux récepteurs spéciaux ont été introduits; plus le besoin est élevé, plus ils sont activés. Le niveau de saturation diminue avec le temps, le taux de cette diminution est réglable par l'utilisateur et la sensation de fatigue s'accumule en fonction de l'intensité des contractions musculaires.

Dans les exemples de conservation, on peut observer une certaine concurrence entre ces deux besoins: la fatigue ne peut pas être supprimée par une faim sévère, mais une faim sévère est plus forte qu'une fatigue même sévère.
Maintenant, le comportement du têtard est devenu encore plus vivant, il dépend des motifs et des désirs internes:
Comportement .gif compliqué Conclusions
Le têtard nage et mange, et bien plus encore: il réagit à la lumière, au toucher, si vous le saisissez par la tête, essayez de vous évader (comme prévu dans le simulateur), cherchez et trouvez de la nourriture, souffrez de la faim et de la fatigue, et tout cela sous le contrôle de neurones virtuels .
Le têtard le plus complexe a 63 neurones et 131 connexions synaptiques; je me souviens que Caenorhabditis elegans a 302 neurones, et le têtard biologique a besoin de 1500 neurones pour la natation normale seule. Plus l'animal est développé, plus la redondance des neurones dans la résolution des problèmes est élevée, ce qui est dû aux processus évolutifs et au besoin de fiabilité du système. Il est encore difficile d'évaluer la redondance des neurones par rapport au cerveau humain, mais, à mon avis, pour mettre en œuvre un modèle informatique proche du cerveau humain, des ordinateurs quantiques ou mainframes, un ordinateur domestique suffisamment puissant, ne seront pas nécessaires. Il s'agit d'une déclaration très audacieuse, d'une part, contredisant l'opinion de nombreux experts sur ce sujet, et d'autre part, retirant l'aréole de la super-complexité de cette tâche, sans laquelle il est difficile de supprimer les investissements fabuleux des investisseurs. L'essentiel maintenant n'est plus la puissance de calcul, mais le développement de la bonne technologie et des bonnes approches.
Plans futurs
OPENTadpole est une petite étape, sur un long chemin pour développer un outil de modélisation de systèmes nerveux complexes, qui, à mon avis, a été achevé avec succès.
La tâche suivante: créer un modèle capable de distinguer les commandes vocales simples, tout comme les animaux de compagnie, pour les apprendre également et, si nécessaire, se recycler, avec une compréhension du contexte de l'équipe. Pendant que je travaille, je vais essayer de partager mes découvertes avec les lecteurs de GT.
OPENTadpole dowland pour WindowsCode source