Aujourd'hui, la collaboration LIGO & Virgo a annoncé (elle sera publiée en PRL, l'article peut être lu
ici ) une nouvelle détection des ondes gravitationnelles (GW170814). Les trois premiers événements (
un ,
deux ,
trois ) ont été enregistrés sur deux détecteurs LIGO aux États-Unis. Le 1er août, le détecteur européen
Advanced VIRGO , situé en Italie, a rejoint les observations. Et le 14 août, les ondes gravitationnelles de la confluence de deux trous noirs ont été détectées par les trois détecteurs.
 Évaluation de l'emplacement de toutes les sources enregistrées d'ondes gravitationnelles. GW170814 est défini avec une précision beaucoup plus grande en raison de l'utilisation des données de trois détecteurs.
Évaluation de l'emplacement de toutes les sources enregistrées d'ondes gravitationnelles. GW170814 est défini avec une précision beaucoup plus grande en raison de l'utilisation des données de trois détecteurs.À propos du signal
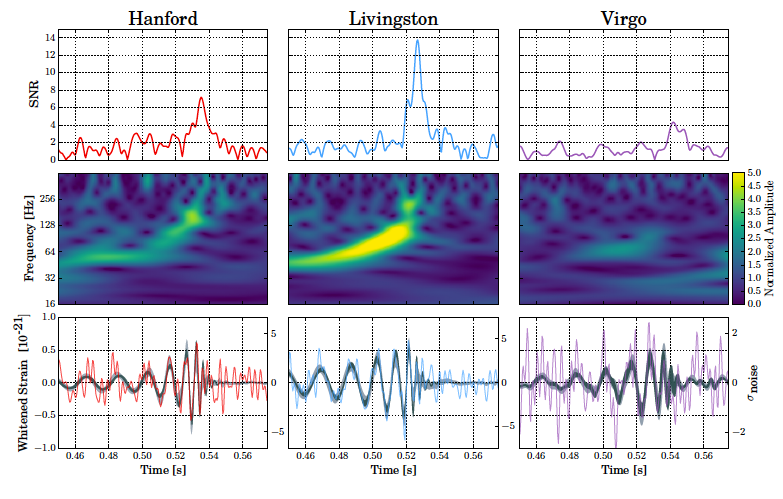 Rangée du haut: rapport signal / bruit pour trois détecteurs LIGO Hanford, LIGO Livingston et Virgo; rangée du milieu: changement dans le spectre du signal au fil du temps; rangée du bas: signal horaire (couleur), signal filtré (gris) et modèle GR superposé (noir)
Rangée du haut: rapport signal / bruit pour trois détecteurs LIGO Hanford, LIGO Livingston et Virgo; rangée du milieu: changement dans le spectre du signal au fil du temps; rangée du bas: signal horaire (couleur), signal filtré (gris) et modèle GR superposé (noir)Comme les trois fois précédentes, la source du signal était la fusion des trous noirs des masses solaires 25 et 30, à une distance d'environ 1,5 milliard d'années-lumière. À la suite de la fusion, un trou noir a été formé avec une masse de ~ 53 à partir du solaire, et ~ 2,7 masses solaires ont été transformées en ondes gravitationnelles. Le rapport signal / bruit 18 donne la probabilité d'un signal erroné 1 sur 27 000 ans. Le signal lui-même est bien corrélé avec GR, il n'y a pas de surprise ici. Le plus intéressant est le fait de la détection sur trois détecteurs, et les connaissances supplémentaires que l'on peut en tirer.
Tous les faits sur la tablette Vierge avancée

Le détecteur européen est situé près de Pise, en Italie. La collaboration Virgo rassemble des scientifiques d'Italie, de France, de Hollande, de Pologne et de Hongrie. Le détecteur lui-même est similaire à Advanced LIGO, mais avec moins de sensibilité en raison de plusieurs facteurs: il est un peu plus court - la longueur du bras de l'interféromètre est de 3 km, pas 4, comme dans LIGO; les suspensions des miroirs sont en métal (moins de facteur de qualité et plus de bruit thermique); le laser est moins puissant; systèmes de contrôle et de filtrage du bruit à un stade antérieur de mise en œuvre.
En conséquence, la sensibilité aux hautes fréquences est plusieurs fois inférieure à LIGO et le détecteur lui-même est assez bruyant. Le bruit non filtré de l'alimentation à 50 Hz, ainsi que les pics de différents signaux de commande, sont clairement visibles sur le spectre.
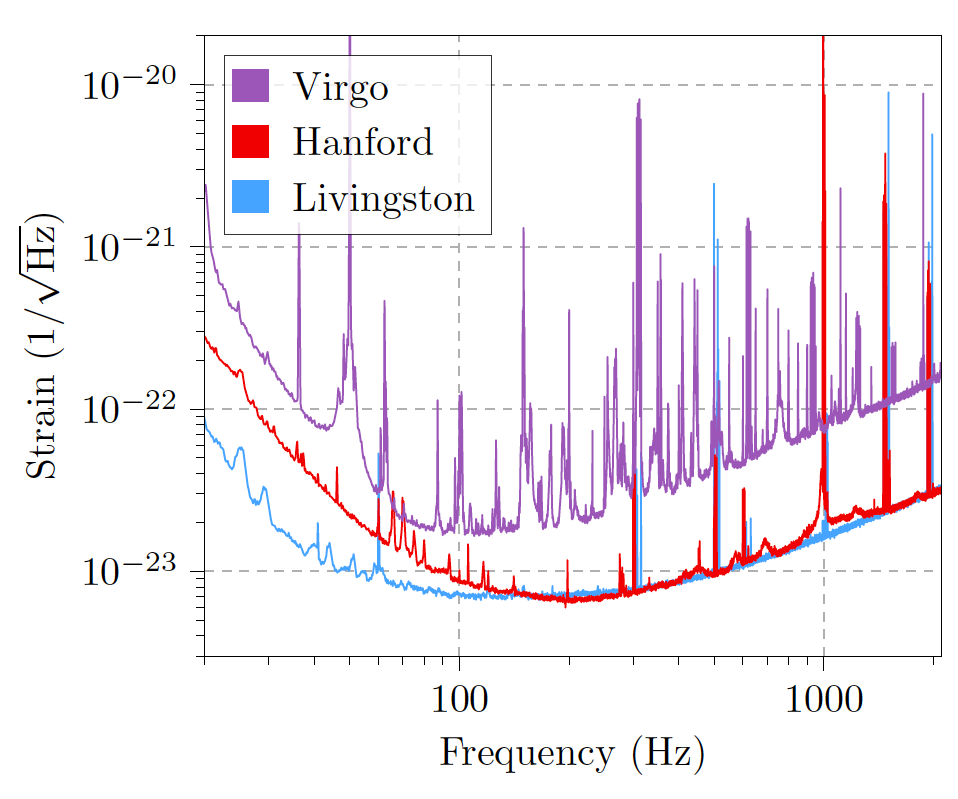 Densité spectrale de bruit des détecteurs (avec des bruits connus filtrés). Plus le bruit est faible, plus la sensibilité du détecteur est élevée.
Densité spectrale de bruit des détecteurs (avec des bruits connus filtrés). Plus le bruit est faible, plus la sensibilité du détecteur est élevée.Comment un troisième détecteur aide-t-il à la détection?
La faible sensibilité de Virgo rend difficile la reconnaissance du signal dans le bruit (comme on peut le voir sur la deuxième image de l'article), et sans LIGO ce signal ne serait pas reconnu comme suffisamment fiable. Cependant, en combinaison avec deux détecteurs LIGO, il vous permet de trianguler l'emplacement de la source avec une précision beaucoup plus grande.
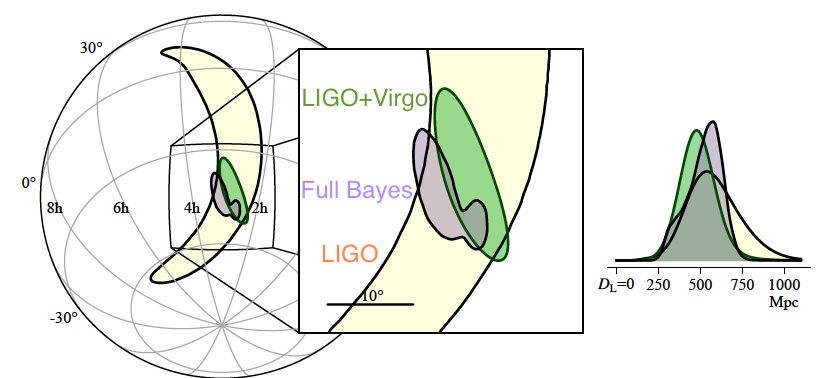 Région où la source du signal est située dans le ciel: jaune - uniquement LIGO, vert - LIGO et Virgo ensemble, violet - estimation bayésienne de l'emplacement, en tenant compte de tous les paramètres du modèle basé sur LIGO et Virgo. Droite: plage source estimée.
Région où la source du signal est située dans le ciel: jaune - uniquement LIGO, vert - LIGO et Virgo ensemble, violet - estimation bayésienne de l'emplacement, en tenant compte de tous les paramètres du modèle basé sur LIGO et Virgo. Droite: plage source estimée.De plus, le troisième détecteur, situé dans un autre plan, permet d'estimer la polarisation des particules mouvementées. En relativité générale, les ondes gravitationnelles étirent et compressent l'espace perpendiculairement à la direction de leur propagation, et il y a deux polarisations (x et +)
 Photo de Tom Dunne
Photo de Tom DunneLorsque le HW arrive au détecteur strictement perpendiculaire au plan de l'interféromètre
et que l' orientation des bras coïncide avec la polarisation, l'amplitude du signal atteint un maximum. Si, par exemple, une onde polarisée x arrive sur un détecteur tourné à 45 degrés par rapport à lui, les deux bras sont étirés de la même manière et le motif d'interférence à la sortie ne change pas, c'est-à-dire qu'il n'y aura pas de signal. S'il y a deux détecteurs situés dans des plans différents, comme LIGO et Virgo, l'amplitude du signal différera non seulement en raison de la pente par rapport à la direction de propagation, mais également en raison de l'orientation différente du détecteur par rapport à la polarisation. Cela permet d'estimer la polarisation du HS. Les deux détecteurs LIGO sont presque dans le même plan et ont une orientation proche, mais Virgo est situé sous un grand angle, ce qui améliore considérablement les estimations.
Un point intéressant ici est le suivant: les théories métriques de la gravité (et GR n'en est qu'une) autorisent non seulement la polarisation tensorielle (comme dans GR), mais aussi la polarisation vectorielle et scalaire. La capacité de mesurer la polarisation nous permet de vérifier si nous mesurons vraiment la polarisation du tenseur. Pour cela, les mêmes calculs pour la fusion, comme dans le cas des GR, sont effectués sous l'hypothèse d'une polarisation scalaire ou vectorielle, et le résultat est comparé au signal réel. En conséquence, GR se révèle être un modèle plus probable que purement scalaire ou purement vectoriel.
Et ensuite?
Le deuxième cycle d'observations est terminé et les scientifiques traitent les données. Les détecteurs sont en service et le prochain cycle scientifique commencera quelque part dans un an. Pendant ce temps, la puissance des lasers sera augmentée, les pertes dues à la diffusion de la lumière seront réduites et, éventuellement,
de la lumière compressée sera ajoutée.
Restez à l'écoute!
Ajouts
- Belle simulation de fusion de BH
Belle photo du ciel avec des sources de GV - Carte du ciel interactive avec des sources
- Dans un article précédent et des discussions à ce sujet, j'étais bâclé dans la façon de détecter la gravité. les ondes peuvent aider à estimer la vitesse de leur propagation.
DétailsEn particulier, j'ai dit que l'utilisation de deux détecteurs pour la «triangulation» peut donner une bonne évaluation de cette vitesse.
Ce n'est pas vrai, si vous évaluez la vitesse simplement par le retard du signal entre les deux détecteurs, vous ne pouvez que limiter cette vitesse. Le sens de propagation à l'aide de deux détecteurs est difficile à déterminer, et même à partir des données de toutes les détections, mais compte tenu de toutes les incertitudes, l'estimation peut être donnée avec une précision de 50%. Même trois détecteurs donnent une précision assez faible, dans un pourcentage.
Ici vous pouvez en lire plus.L'estimation que j'ai donnée provient de l'estimation de la dispersion des tombes. vagues, en supposant la validité de GR. Autrement dit, la détection nous permet de dire avec une très grande précision qu'il n'y a pas de dispersion de GW, et donc, conformément à GR, leur vitesse est égale à la vitesse de la lumière.
Merci à
Serge3leo pour les corrections.