
En plus de notre fête natale du 12 avril - Journée de la cosmonautique - il y a aussi toute une semaine spatiale mondiale, qui dure du 4 au 10 octobre. Et récemment, un autre article que les robots nous priveront de travail à l'avenir nous a incités à nous interroger sur la situation de la robotique de l'astronautique? Under the cut - un bref aperçu de l'utilisation des robots spatiaux modernes.
Comme le dit Wikipedia:
Le robot est un appareil automatique créé selon les principes de reconnaissance, de rétention et de mouvement des objets dans des environnements dangereux et dangereux, conçu pour effectuer divers types d'opérations de production, qui fonctionne selon un programme prédéfini et reçoit des informations sur la position et l'état de l'espace environnant via des capteurs. Le robot effectue indépendamment la production et d'autres opérations auxiliaires qui remplacent partiellement ou complètement le travail humain. Dans ce cas, le robot peut à la fois avoir une connexion avec l'opérateur pour en recevoir les commandes, et agir de manière autonome, conformément au programme défini.
Sous le terme «robot», vous pouvez apporter une myriade d'appareils. Et ceux que vous-même dans la vie ne considéreriez pas comme un robot. Par exemple, les guichets automatiques sont officiellement des robots «d'argent»: ils sont capables d'accepter et de donner automatiquement de l'argent, de reconnaître la valeur nominale des billets de banque, de les trier par leurs cassettes internes et de travailler avec des cartes bancaires sans intervention humaine. Même les manipulateurs industriels sont considérés comme des robots, bien que leur fonctionnalité soit plusieurs fois inférieure à celle des distributeurs automatiques de billets; mais d'un autre côté, ils bougent, et donc dans nos esprits sont plus cohérents avec le fier titre de "robot".
Les robots ont commencé à participer à l'exploration spatiale plus tôt que les humains: la station interplanétaire automatique (AMS) Luna-1 a été lancée en 1959 (Gagarine a volé en 1961) et est devenue le premier vaisseau spatial à atteindre la deuxième vitesse spatiale et le premier satellite artificiel du Soleil. Après Luna-1, à ce jour, des dizaines d'AMS ont été lancées dans l'espace, dont les plus célèbres sont les «frères» Voyagers. Peut-être que certains satellites modernes peuvent également être considérés comme des robots. Tous les rovers de la planète - les nôtres et les rovers lunaires chinois, les rovers américains - sont généralement des robots d'eau pure.
Classiques sans âge
Si nous parlons des catégories d'appareils qui nous sont familiers, alors du dernier, le plus impressionnant, nous pouvons nous rappeler comment le vaisseau spatial Rosetta a amené et déposé le véhicule de descente Fila sur la comète Churyumov - Gerasimenko:

L'Agence spatiale européenne a réussi à mettre en œuvre un projet véritablement révolutionnaire: pour la première fois dans l'histoire, mettre avec succès une machine artificielle sur une comète. "Fila" a dû prendre pied à la surface du noyau à l'aide de harpons, car la gravité y est trop faible, mais ils n'ont pas fonctionné, comme le moteur de fusée, qui était censé pousser l'appareil à la surface. Cependant, Fila est néanmoins montée sur une comète et a mené un certain nombre d'études, y compris l'analyse chimique du sol.
En 2013, le rover lunaire chinois Yutuk a atterri sur la lune. En fait, la chose la plus remarquable à son sujet est qu'il: a) chinois; b) le premier rover lunaire depuis plus de 40 ans depuis la fin du Lunokhod-2 soviétique. Avec les trois mois de travail actif prévus, Yutu a cessé de bouger après deux. Certes, il ne s'est pas cassé complètement, mais a résisté plus de deux ans, de temps en temps à entrer en contact. Il est allégué qu'avec l'aide de Yut, un nouveau type de sol lunaire a été découvert.
Quant aux rovers planétaires russes, Lunokhod-2 (1973) était notre dernier projet achevé. Aujourd'hui également, il est prévu de créer des véhicules de descente Luna-25, Luna-27 et Luna-28. Le premier est conçu pour percer la technologie, le second analysera les échantillons de sol en place, et le troisième est d'apporter de la glace lunaire sur Terre.
Luna-25 (Luna-Glob):

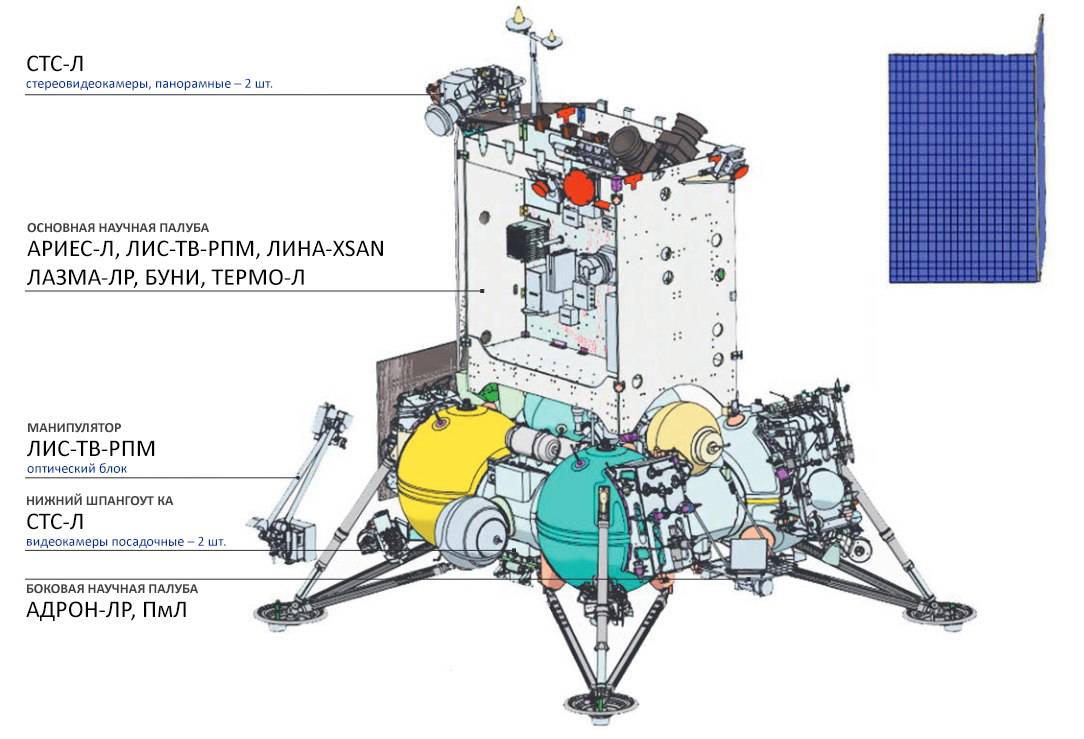
Luna-27 (Luna-Resource-PA):
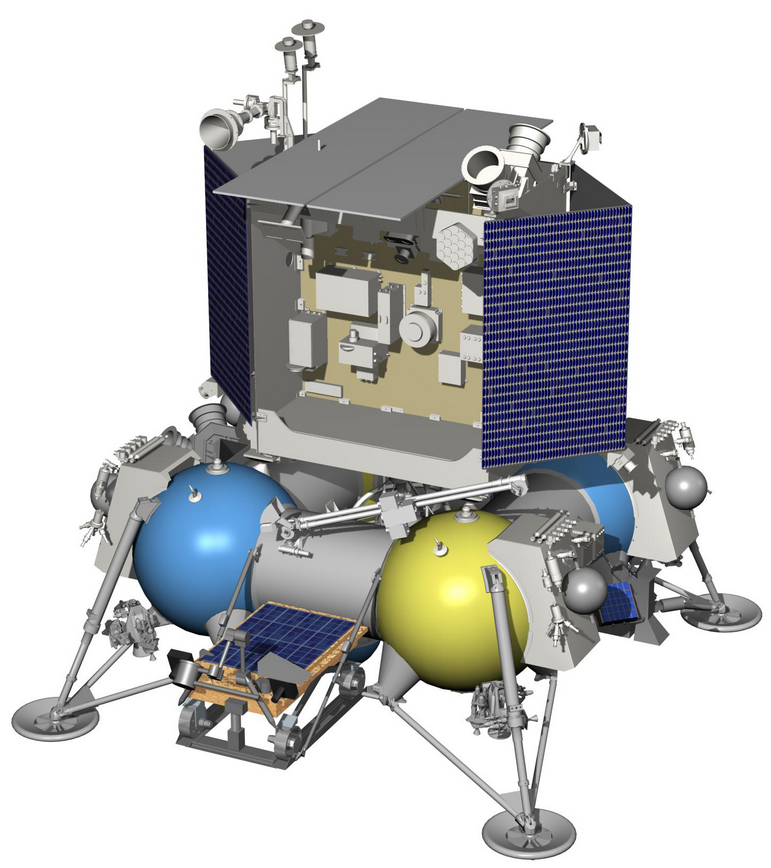
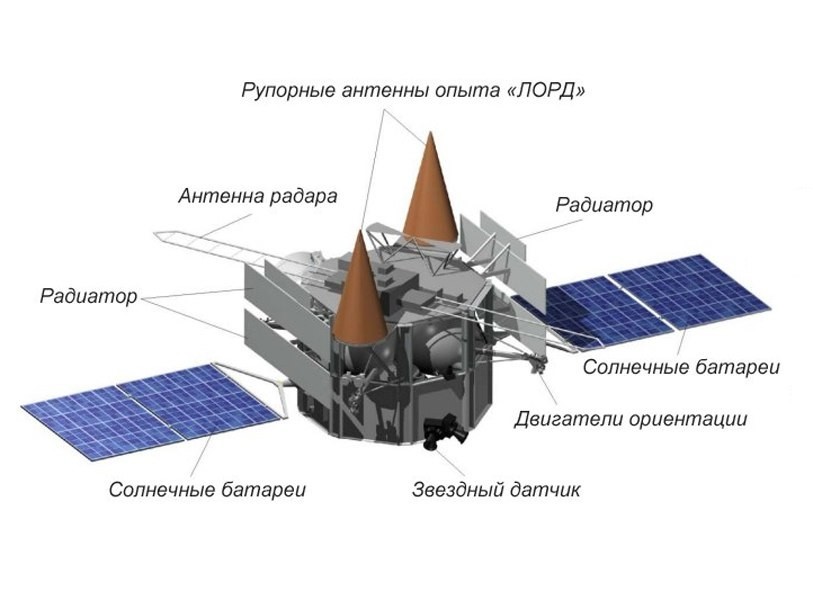
Dans le cadre du même projet, la station automatique Luna-26 (Luna-Resource) explorera également la Lune:
Compte tenu des reports constants et des coûts réduits du programme spatial, on ne sait pas si ces véhicules voleront du tout. Les robots de recherche modernes - AMS, planet rovers - sont très coûteux à développer, à créer et à lancer. Par conséquent, ces projets sont souvent le résultat d'une coopération internationale. Par exemple, le programme ExoMars est mis en œuvre conjointement par l'Agence spatiale européenne et Roscosmos. La première partie, ExoMars 2016, n'a été que partiellement réussie: le satellite relais Trace Gas Orbiter est entré avec succès en orbite autour de Mars et l'atterrisseur Schiaparelli s'est écrasé. En 2020, il est prévu de lancer la deuxième phase du programme - envoyer à Mars la plate-forme de surface développée par Roscosmos avec le rover ExoMars. Espérons que tout se passera bien, et le planétaire rover de conception russe commencera enfin à étudier le désert martien.

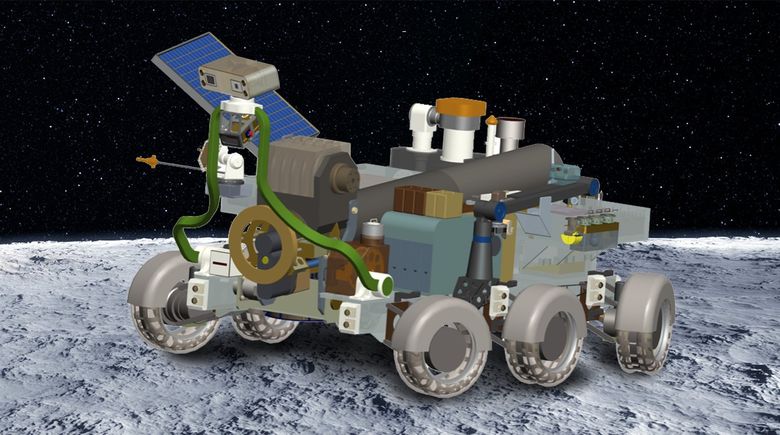
Cependant, il y a de l'espoir que Roscosmos met en œuvre un autre projet intéressant d'un rover de planète de recherche, qui jusqu'à présent porte le nom de "Robot Geologist". Il y a deux ans, il a été signalé qu'en termes de fonctionnalité, il serait comparable à Curiosity, qui a volé vers Mars en 2012, seul le «robot géologique» va être envoyé sur la Lune. Un rover lunaire à six roues mesurera environ 4 m de long et pèsera environ 1400 kg. Jusqu'à présent, ce n'est qu'un projet, mais qui sait ...
Et voici les stylos!
Depuis de nombreuses années, deux manipulateurs robotiques travaillent sur l'ISS dans l'espace: le manipulateur canadien Canadarm2 avec le SPDM «d'expansion» («Dextre»), qui peut être contrôlé à la fois depuis la station et depuis la Terre:

... et JEMRMS japonais de 10 m de long:

Avatars de robots
L'un des domaines les plus intéressants du développement de la robotique spatiale est celui des robots avatars. Ce sont des appareils que les astronautes peuvent contrôler à distance, effectuant des travaux dans l'espace, mais en même temps dans la chaleur et le confort d'une station spatiale. Le fait est que la libération d'une personne dans l'espace coûte très cher: chaque astronaute est cousu avec des combinaisons spatiales individuelles, qui valent en soi plusieurs voitures de luxe, mais elles doivent encore être livrées à la station. Si vous calculez tous les coûts, alors chaque heure de travail des astronautes dans l'espace coûte, selon diverses sources, 2 à 4 millions de dollars. De plus, il est loin d'être toujours nécessaire d'avoir une ingéniosité particulière; les opérations de routine suffisent dans la réparation / l'installation / le déchargement / le chargement de l'espace. Ce serait idéal si des robots autonomes faisaient cela, et les astronautes passeraient leur temps à des tâches plus importantes ou se détendreaient plus. Mais hélas, les technologies d'intelligence artificielle n'en sont qu'à leurs balbutiements, vous pouvez donc économiser de l'argent et du temps sur les sorties dans l'espace uniquement à l'aide d'avatars robotiques.
Leur développement se fait à la fois en NASA, à Roscosmos, et éventuellement dans d'autres pays. Par exemple, dans le cadre du programme américain Robonaut, plusieurs modèles de robots avatar anthropomorphes ont été créés. Robonaut 2 envoyé en 2011 à l'ISS.

Cette année, la compétition lancée par la NASA pour développer les meilleurs algorithmes de contrôle pour le futur robot Robonaut 5 ("Valkyre"), qui devrait être utilisé dans diverses missions d'agence, y compris lors d'une expédition vers Mars, a pris fin.

Le robot de 185 cm de haut pèse 135 kg, consomme 1,8 kWh et est contrôlé par deux ordinateurs basés sur l'Intel Core i7. Le robot reçoit des informations de base sur l'environnement environnant à l'aide d'un système de capteurs, y compris la vision stéréo passive, le balayage laser et la génération d'un nuage de points lumineux structuré infrarouge (génération de nuages de points lumineux structurés IR). La puissance du robot peut être autonome ou câblée.
Le robot avatar anthropomorphe russe SAR-400 - notre premier robot spatial après une pause de 20 ans - a été noté dans les nouvelles il y a quelques années en faisant un tour devant le président sur un VTT. Après des essais au sol sur un prototype grandeur nature du module ISS, les robots devaient être envoyés à la station réelle, mais ces plans ont été abandonnés. Plus tard, un modèle SAR-401 amélioré a été introduit, qui est également engagé sur l'ISS, mais pas avant 2021.
En outre, notre société spatiale prévoit de s'installer sur l'ISS Andronavta, un robot compagnon pour l'assistance psychologique et informationnelle aux astronautes. Ce n'est pas la première expérience de ce genre: en 2013, le robot japonais Kirobo a été amené à la station, qui est devenu, ghm, un compagnon de l'astronaute japonais. Mais alors que Kirobo ne mesurait que 34 cm et pesait 980 grammes, l'Andronaut avait la taille d'un gars costaud. Le prototype actuel est encore trop grand pour l'ISS, et si nous envoyons un robot de ce but à la station, ce sera certainement un modèle plus compact.

De plus, Andronaut est un robot à double usage: il peut également fonctionner en mode avatar, étant contrôlé par une personne à la fois depuis la station et depuis la Terre. Il est censé être utilisé pour les travaux à l'intérieur du module de la station en cas de dépressurisation, ainsi que pour l'inspection programmée en mode semi-autonome.
Lui-même un maître
Un projet intéressant est en cours de développement sous les auspices de la NASA - un robot spatial ("Dragonfly") pour l'assemblage et la réparation de satellites. En fait, il s'agit d'un bras manipulateur de 3,5 m de long avec lequel les satellites peuvent monter indépendamment des antennes et d'autres équipements fragiles sur eux-mêmes dans l'espace. Dragonfly sera également utilisé pour assembler de grands satellites dans l'espace qui sont trop chers ou impossibles à mettre en orbite entièrement.
Le même bureau SSL que Dragonfly crée travaille également sur des projets de robots de réparation de satellites - RSGS et Restore-L. Il s'agit d'un problème très urgent, car la durée de vie des satellites n'est pas trop longue, généralement une question d'années. Ensuite, ils manquent de carburant pour les moteurs de manœuvre ou ils meurent, reconstituant souvent la légion de débris spatiaux qui a déjà enveloppé la planète. Et avec l'aide de robots de réparation, vous pouvez économiser de l'argent sur le lancement de nouveaux satellites au lieu de brisés et ralentir la litière de l'espace proche de la Terre.
L'année dernière, le chef du laboratoire de robotique spatiale TsNIImash a déclaré que des robots de réparation de satellites étaient également en cours de développement dans notre pays. Mais nous n'avons pu trouver aucune information sur ces développements.
Abeille étoilée
La NASA prévoit d'envoyer prochainement un robot auxiliaire spécifique Astrobee à l'ISS. Il s'agit d'un cube d'un côté de 30 cm, qui volera autour de la station et aidera les astronautes à mener des expériences en microgravité, ainsi que des yeux et des oreilles supplémentaires pour Houston. Une sorte de mouchard flottant.
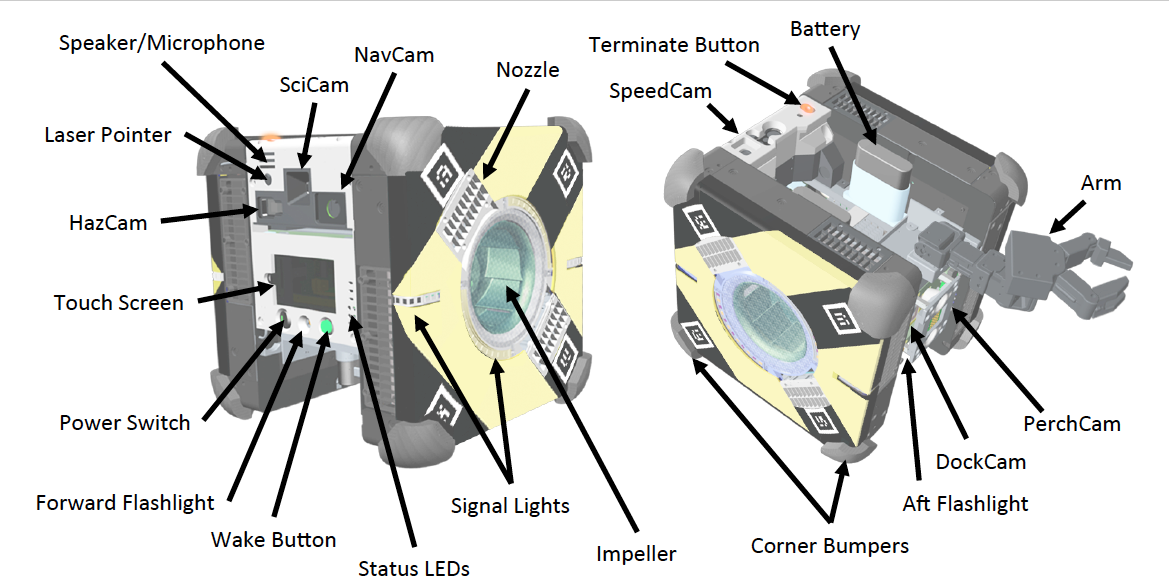
Le "Star Bee" a même un petit manipulateur avec lequel il peut s'amarrer quelque part ou tenir quelque chose pendant les expériences. Le robot supprimera les tâches d'inventaire de routine des astronautes; à l'aide d'un scanner RFID, il sera en mesure de cataloguer et de mettre à jour les données sur l'emplacement des unités et des objets à la station. De plus, cet alter ego high-tech Lizuna pourra surveiller la qualité de l'air et le niveau de bruit sur l'ISS.
Voleur d'astéroïdes
La NASA, en tant qu'agence aérospatiale la plus riche du monde, peut se permettre des projets très complexes et inhabituels. Vers le milieu des années 2020, ils allaient mettre en œuvre la mission originale de redirection des astéroïdes pour l'étude des astéroïdes. Un robot spécial a dû voler jusqu'à l'astéroïde, trouver un rocher approprié à sa surface, le saisir avec des manipulateurs et le mettre en orbite autour de la Lune, où les astronautes prendraient le caillou dans leurs bras amis, prendraient des échantillons et l'enverraient sur Terre pour analyser la composition chimique pour découvrir toute la vérité à propos de cet astéroïde d'où le rocher a volé. Le prototype du robot a déjà passé les tests, son lancement était prévu pour le 2021. Mais les programmes spatiaux ne font pas que couper avec nous, et le projet est devenu victime de coupes budgétaires. Peut-être que le prototype du robot porteur de pierre sera utilisé dans d'autres missions de la NASA.
Bien qu'en réalité, comme nous l'avons déjà mentionné, les robots dans l'espace représentent une dizaine de centimes, il n'y a presque pas d'appareils qui, dans l'esprit du lecteur de masse, correspondent au titre de «robot», un appareil anthropomorphe fonctionnant de manière autonome. Une autre chose est que ce sont les robots anthropomorphes dans l'espace qui sont nécessaires en premier lieu - la rationalité, la fonctionnalité et la règle de spécialisation là-bas. L'anthropomorphisme, pour la plupart, n'est approprié que pour les appareils qui entrent souvent ou constamment en contact avec les humains. En attendant, la grande majorité des robots spatiaux ressemblera à tout sauf à des «robots». Mais lorsque nous créerons une technologie d'intelligence artificielle, suffisamment compacte et économe en énergie, pour qu'elle puisse être intégrée dans des appareils spatiaux avec leurs limitations de masse les plus sévères, la deuxième ère des robots arrivera.
En attendant, nous vous souhaitons plein succès, bonne chance et généreux financement aux développeurs d'Andronaut!