Salut les Geektimes! Dans cet article, je veux parler des systèmes de recherche personnels micro-ondes modernes, ainsi que des résultats de notre projet, qui développe un nouveau système de recherche micro-ondes prometteur basé sur l'utilisation combinée du radar et de la vision industrielle. Il est prévu que le système d'inspection développé sera utilisé pour le transport terrestre avec un trafic de passagers important. Cet objectif sera atteint grâce à des caractéristiques techniques supérieures: un débit extrêmement élevé, la possibilité d'inspection dans des vêtements d'extérieur serrés, des caractéristiques de poids et de taille nettement inférieures, des coûts et une consommation d'énergie. L'article décrit la configuration et la procédure expérimentale créées dans le projet pour simuler le système d'inspection micro-ondes décrit, ainsi que le résultat d'une expérience avec un mannequin avec des objets cachés sous des vêtements.
Afin de comprendre en quoi le système de recherche personnelle à micro-ondes développé diffère des systèmes existants sur le marché et comment il est possible de surmonter les limitations existantes des systèmes de recherche à micro-ondes qui entravent leur utilisation généralisée (tels que les détecteurs de métaux sur châssis), il est nécessaire de tenir compte de la situation.
Pour obtenir des images radar d'objets cachés sous les vêtements dans tous les systèmes d'inspection à micro-ondes, une synthèse d'ouverture est utilisée, dans laquelle le mouvement mécanique des antennes ou leur commutation électronique permet la formation d'une antenne avec une ouverture équivalente plus grande. En utilisant l'ouverture synthétisée, une résolution spatiale élevée est obtenue, qui est déterminée par la longueur d'onde, la bande du signal de la sonde et également la taille de l'ouverture elle-même. Le paramètre fondamental limitant la résolution spatiale des images radar est la longueur d'onde de rayonnement, car il est impossible d'obtenir une résolution spatiale inférieure à la longueur d'onde dans une géométrie de sonde qui est pratiquement adaptée à l'inspection humaine.
Dans les systèmes d'inspection modernes, l'ouverture synthétisée est formée de deux manières: en raison du mouvement mécanique des antennes et de la commutation électronique, ou uniquement en raison de la commutation électronique. Le
système L-3 ProVision le plus célèbre et le plus répandu, par lequel de nombreux lecteurs sont passés, utilise le balayage mécanique avec deux réseaux d'antennes verticales linéaires. Dans le sens vertical, l'ouverture synthétisée est obtenue par commutation électronique des antennes, et dans le sens horizontal par déplacement mécanique [1].
Dans les systèmes ultérieurs, tels que
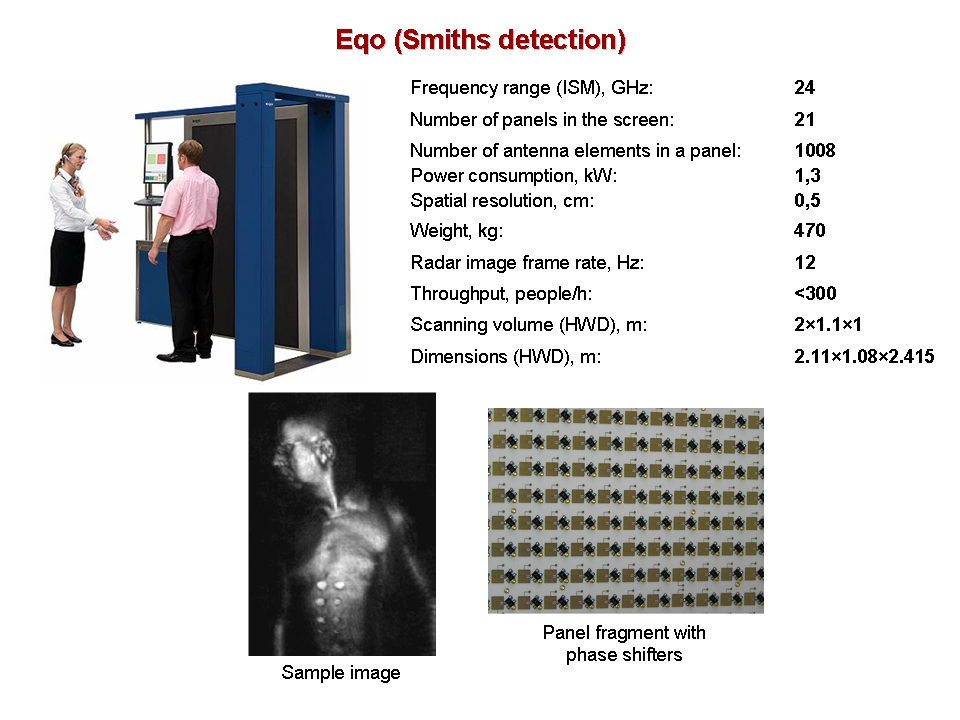
Eqo de Smiths Detection [2] et
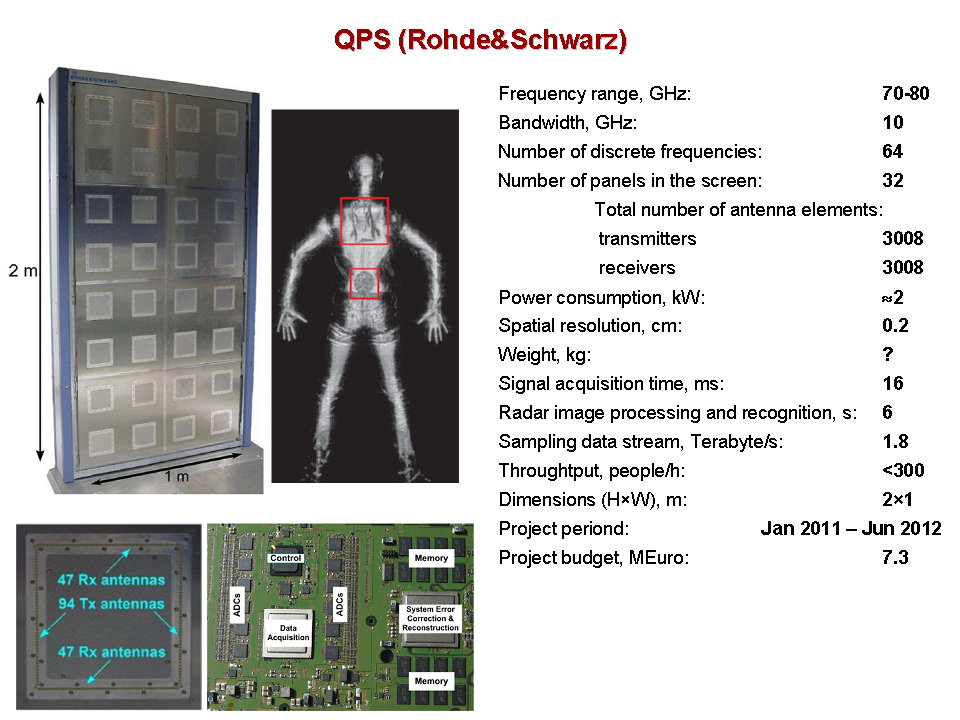
QPS de Rohde & Schwarz [3], le déplacement mécanique n'est pas utilisé pour former l'ouverture. Au lieu de cela, il y a une commutation rapide d'antennes ou d'éléments d'antenne situés sur un écran plat, ce qui vous permet de recevoir en temps réel une image radar recherchée à partir de l'emplacement du panneau. Malgré la commutation électronique rapide des antennes dans les deux derniers systèmes, leurs performances restent au niveau du système avec balayage mécanique L-3 ProVision, car la personne inspectée doit nécessairement enlever ses vêtements d'extérieur, aller dans la zone d'inspection, prendre une pose stationnaire pendant la durée du balayage (QPS), ou tourner, immobile, pour recevoir des images radar de toutes les directions (Eqo).
Dans les systèmes d'inspection à commutation électronique, la partie hyperfréquence est beaucoup plus compliquée que dans les systèmes à balayage mécanique, car la commutation du nombre accru d'antennes est nécessaire. En raison du plus grand nombre de canaux, un énorme flux de données est généré dans le système (faites attention à ce paramètre dans le système QPS), ce qui nécessite le traitement en temps réel d'un ordinateur haute performance qui consomme la majeure partie de l'énergie consommée. Le seul avantage des systèmes de criblage dans le facteur de forme d'écran est leurs dimensions plus petites par rapport à la version portail du L-3 ProVision.
Basé sur l'approche traditionnelle de synthèse de l'ouverture, le débit des systèmes d'inspection à micro-ondes peut être augmenté en entourant une personne examinée avec de nombreux panneaux avec des antennes pour obtenir une visualisation simultanée sous différents angles. Cette approche a été mise en œuvre dans le système d'inspection
easyCheck développé par Camero [4]. Ce système a une conception de portail sous la forme de panneaux avec des antennes situées autour de la personne recherchée. Des images radar multi-angles d'une personne passant par le portail sont obtenues avec une fréquence de 8 Hz, ce qui permet de détecter des objets dangereux cachés sous des vêtements en mouvement.
Actuellement, tous les systèmes d'inspection du marché reconnaissent automatiquement les objets dangereux et signalent le résultat de la reconnaissance sous forme de pictogrammes sans montrer d'images radar à l'opérateur, préservant ainsi l'intimité des inspectés.
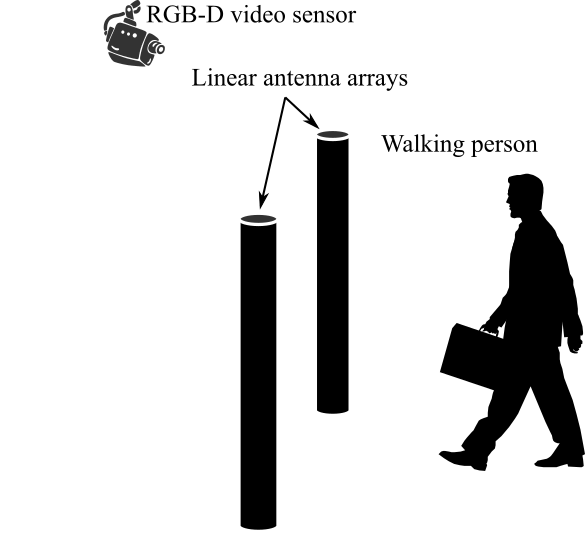
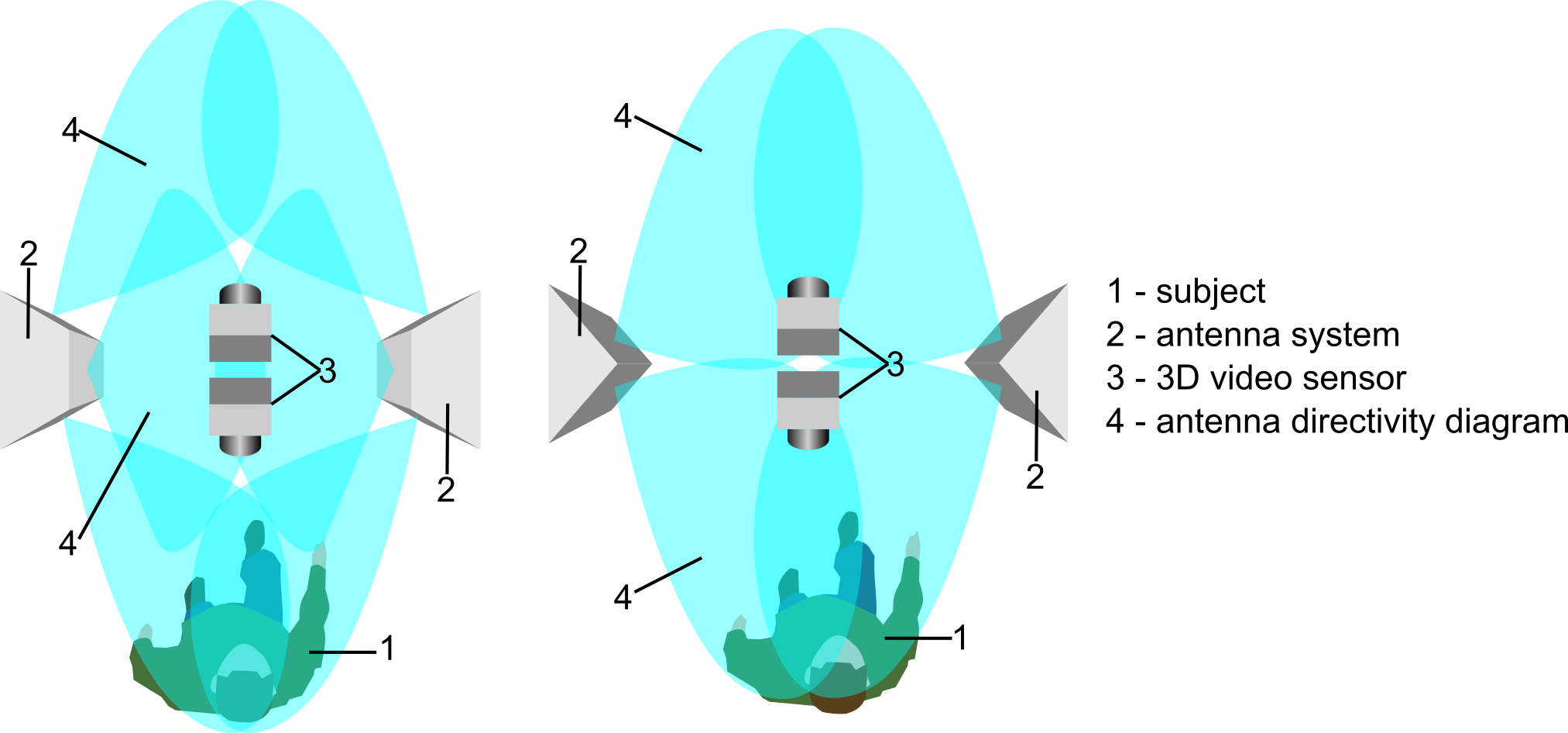
Dans le système de recherche que nous développons, pour la formation de l'ouverture synthétisée, le mouvement naturel d'une personne entre des réseaux d'antennes linéaires verticales stationnaires sera utilisé, ce qui nous permet de dépasser les analogues dans les caractéristiques suivantes: débit, poids, dimensions, coût et consommation d'énergie. Un traitement cohérent du signal radar dans un tel système est effectué à l'aide d'un capteur vidéo RGB-D ou lidar, qui, de manière synchrone avec le système radar, détecte le mouvement de la personne recherchée dans l'espace. La carte de profondeur enregistrée par le capteur vidéo sert à extraire la trajectoire de parties du corps humain pour une compensation ultérieure des raids de phase associés au mouvement du signal radar. Une ouverture synthétisée, formée en déplaçant la cible devant une antenne stationnaire ou un système d'antenne, est appelée une ouverture synthétisée inverse.
Un système d'inspection à micro-ondes utilisant le principe de la synthèse à ouverture inverse devrait avoir les caractéristiques supérieures énumérées ci-dessus pour les raisons suivantes:
- Le débit maximal sera atteint du fait que la personne inspectée n'a pas besoin de s'arrêter, car pour obtenir une image radar, il est nécessaire de passer entre les lignes d'antenne.
- Le poids et les dimensions deviennent minimes, car ni portail n'est nécessaire pour isoler la zone de mouvement de l'antenne, ni panneaux massifs avec des antennes.
- Le nombre d'antennes devient considérablement plus petit que celui des systèmes micro-ondes à commutation exclusivement électronique, ce qui réduit la complexité et le coût de la partie micro-ondes du système d'inspection.
- Les échantillons du signal radar proviennent d'un plus petit nombre de canaux et sont traités au fur et à mesure qu'ils arrivent de manière à ce qu'une fois qu'une personne passe la zone d'inspection, dont la longueur doit être égale à la taille horizontale des panneaux ou du portail des systèmes traditionnels, l'image radar est calculée simultanément pour toute la surface du corps humain. En raison du faible flux de données radar et de leur traitement à la réception, un puissant processeur de données n'est pas nécessaire, et le système micro-ondes peut être construit dans une version mobile sous la forme d'un détecteur de métaux à cadre ou de deux racks avec des antennes situées des deux côtés d'une personne qui marche.
L'opérabilité du système d'inspection micro-ondes décrit a été étudiée en utilisant la configuration expérimentale créée à ces fins [5,6], dont une photographie est montrée dans la figure suivante.
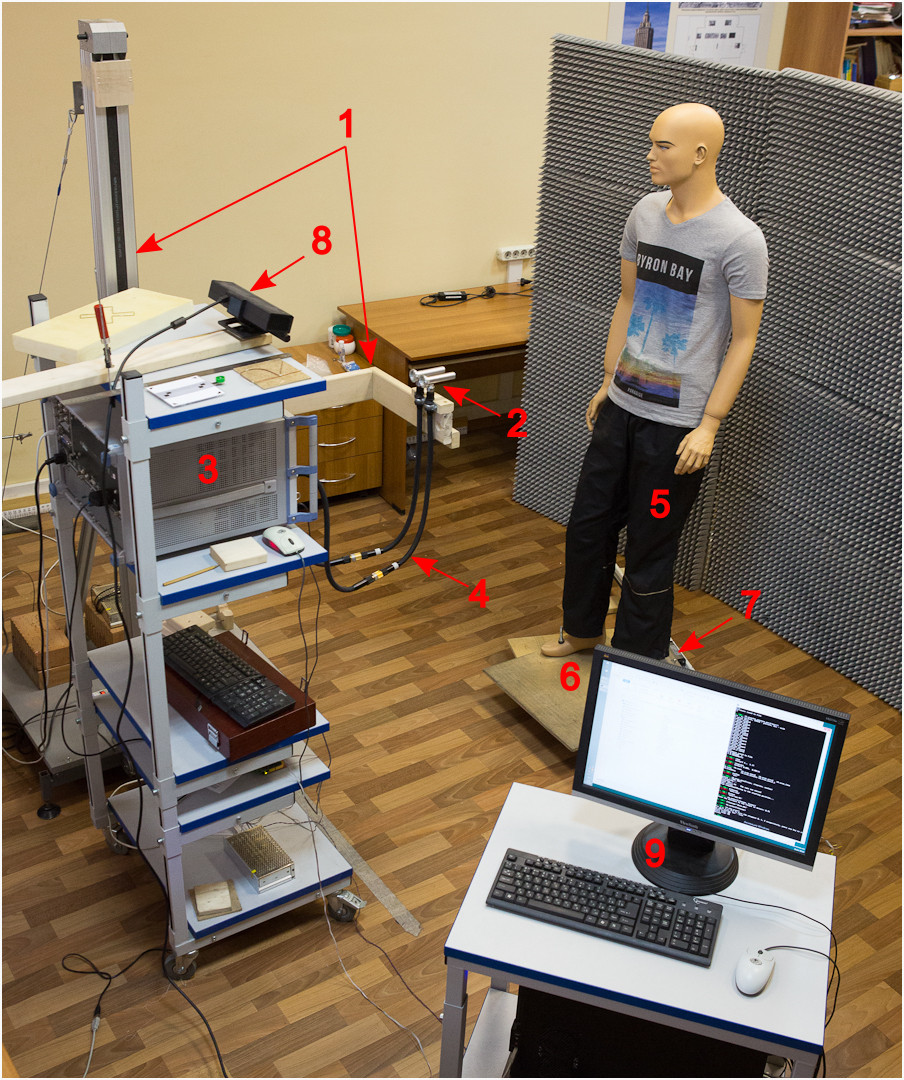
L'installation se compose d'un module de déplacement linéaire (1) des antennes de réception et d'émission (2), d'un analyseur de réseau vectoriel (3), de lignes d'alimentation d'antenne flexibles (4), d'un mannequin (5), d'un chariot pour déplacer le mannequin (6), d'un module de mannequin linéaire ( 7), capteur vidéo RGB-D (8) et ordinateur personnel (9). Les antennes de réception et d'émission (2) sont connectées à l'analyseur de réseau vectoriel au moyen de lignes d'alimentation flexibles (4). Les données sont obtenues par la méthode d'animation de marionnettes. Le mouvement indépendant des antennes de réception et d'émission (si deux modules sont utilisés) le long de lignes parallèles vous permet de simuler le comportement des réseaux d'antennes linéaires monostatiques et multistatiques (MIMO). Dans le même temps, les positions des antennes dans lesquelles les échantillons du signal radar ont lieu sont définies par programme, de sorte qu'avec l'aide de l'installation, il est possible d'étudier les caractéristiques de tout réseau d'antennes linéaire. Un mannequin humain (5), dont la direction de déplacement peut être réglée en orientant le module de déplacement linéaire (7) situé au sol, se déplace progressivement à des intervalles programmables. Après avoir réglé les paramètres de l'expérience: les intervalles des échantillons du signal radar, l'intervalle de mouvement du mannequin, la plage de fréquence du signal de sonde, le nombre de fréquences discrètes, l'expérience passe automatiquement. Pendant l'expérience, pour chaque position du mannequin, une carte en profondeur de la scène de sondage et un échantillon du signal radar à des positions d'antenne données sont enregistrés. Les données obtenues sont traitées ensemble pour obtenir des images radar. Pour obtenir des données similaires en temps réel d'une personne marchant avec une marche, un réseau d'antennes linéaires à commutation électronique sera nécessaire. Une caractéristique clé du système d'inspection développé est l'utilisation d'un capteur vidéo RGB-D (dans la configuration expérimentale, nous avons utilisé Microsoft Kinect v2) ou un appareil similaire qui vous permet d'obtenir une image radar détaillée en utilisant une quantité beaucoup plus petite de données radar.
Des exemples de données initiales enregistrées au cours des expériences sont présentés dans les figures suivantes.
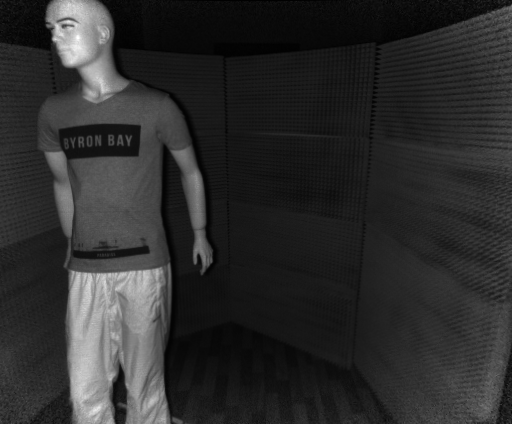 | 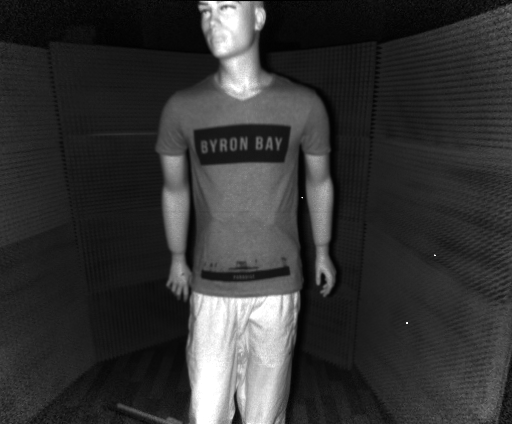 | 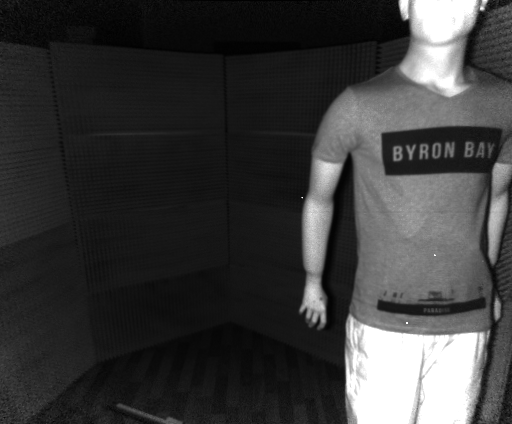 |
| 1ère image | Frame 101 | 201ème cadre |
|---|
| Images IR obtenues avec Microsoft Kinect. |
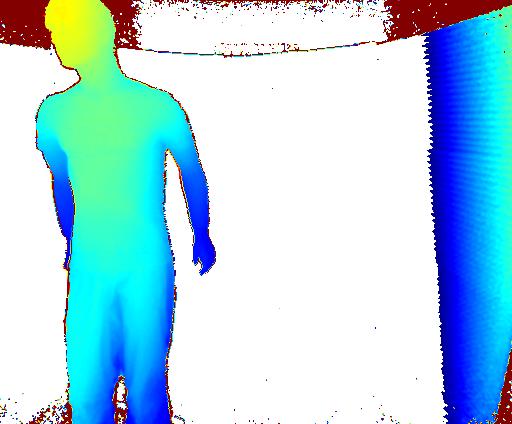 | 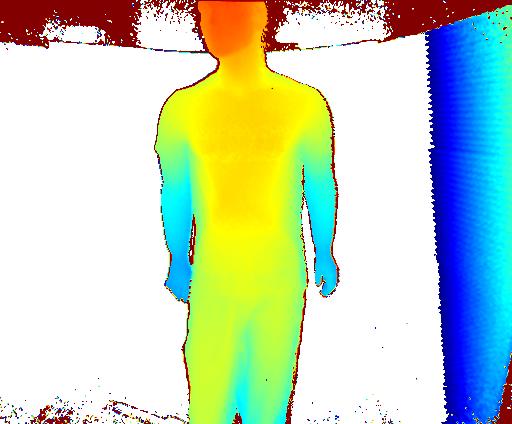 |  |
| 1ère image | Frame 101 | 201ème cadre |
|---|
| Cartes de profondeur obtenues à l'aide de Microsoft Kinect. |
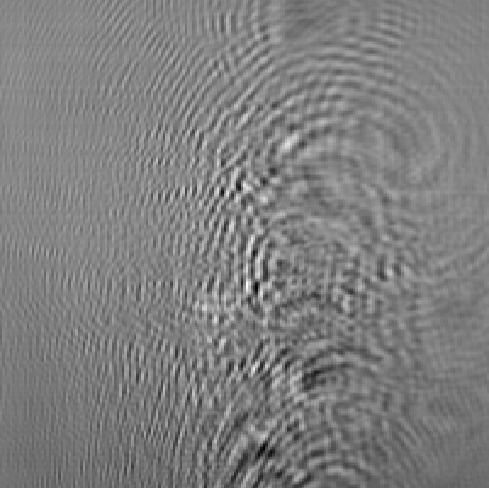 | 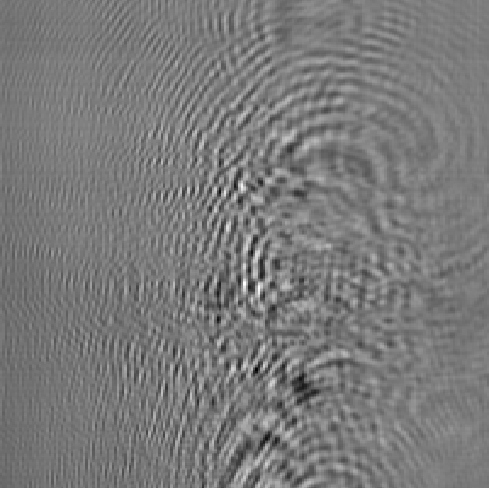 | 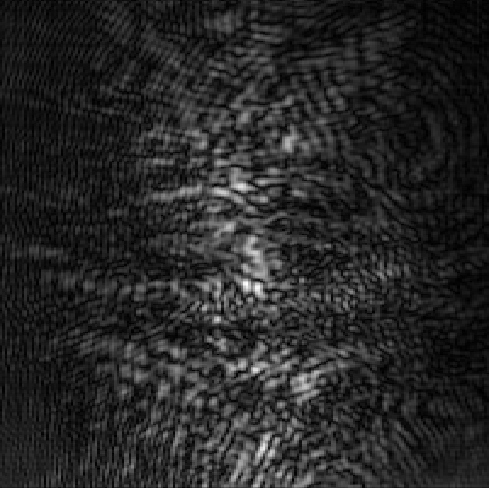 |
| Composant de signal en mode commun | La composante en quadrature du signal | Amplitude du signal |
|---|
| Un signal radar (radio hologramme) enregistré à une fréquence de 15,55 GHz. |
Les images infrarouges et les cartes de profondeur de la scène de sondage ci-dessus, avec les numéros de série 1, 101, 201, ont été obtenues au cours de l'expérience, dans laquelle le mannequin s'est déplacé sur une distance de 1 m avec des arrêts tous les 0,5 cm, ce qui donne 201 images. Le signal radar (radio hologramme) à une fréquence de 15,55 GHz est présenté sous forme d'images en niveaux de gris. La première colonne à gauche de l'hologramme correspond aux échantillons du signal radar avec un pas de 0,5 cm, obtenus à la suite du balayage mécanique de la scène sonore avec le numéro de série 1. La dernière colonne de l'hologramme correspond aux échantillons du signal radar pour la scène sonore avec le numéro de série 201. Les colonnes intermédiaires de l'hologramme correspondent aux scènes avec intermédiaire numéros de série. Au total, le radio hologramme a 201 colonnes, selon le nombre de scènes statiques, et 201 lignes, selon le nombre d'échantillons du signal radar dans un intervalle de 1 mètre de long avec un pas d'échantillonnage de 0,5 cm. Pour enregistrer un radio hologramme similaire en temps réel, un réseau d'antennes linéaires monostatiques de 1 mètre composé de 201 antennes situées à une distance de 0,5 cm les unes des autres. Pour un signal multifréquence composé de
N fréquences, respectivement,
N radio hologrammes sont obtenus.
Avant de traiter les données obtenues, il est nécessaire d'étalonner le système optique du capteur vidéo, ainsi qu'un étalonnage conjoint des systèmes radar et optique de l'installation. L'étalonnage du système optique et du canal de gamme Microsoft Kinect v2 a été décrit
ici . Le système radar a été étalonné en deux étapes. Au premier stade, la position de l'antenne à déplacement linéaire de l'antenne déplacée dans le système de coordonnées associé au capteur vidéo a été déterminée. La deuxième étape consistait à mesurer la position du centre de phase de l'antenne, qui dépend de la fréquence du signal de sondage, qui est nécessaire pour traiter un signal à large bande. La position du centre de l'extrémité ouverte du guide d'onde circulaire utilisé comme antenne a été entrée dans le système de coordonnées du capteur vidéo à l'aide d'un marqueur graphique monté à l'extrémité de l'antenne, comme illustré dans la figure suivante.

La position du marqueur a été enregistrée pour les deux positions extrêmes sur la ligne de balayage. Les positions d'antenne restantes ont été calculées par interpolation. Les moteurs pas à pas et le système optique du capteur vidéo ont fourni une erreur dans le positionnement des échantillons de signal, ce qui a affecté de manière insignifiante la résolution de l'image radar.
Lorsque vous utilisez une large bande du signal de sondage, la position du centre de phase de l'antenne à différentes fréquences peut être différente. Sous le centre de phase de l'antenne, comprenez le centre imaginaire, qui peut être considéré comme le centre de l'antenne rayonnée d'une onde sphérique. Dans une onde sphérique, les surfaces de phase égale sont des sphères. L'antenne était calibrée sur un petit diffuseur par rapport à la longueur d'onde de rayonnement et consistait à trouver un facteur de correction du signal enregistré par l'antenne, ce qui permet d'obtenir la dépendance théoriquement attendue de la phase du signal. L'influence de l'étalonnage de l'antenne est illustrée dans la figure suivante, qui montre le résultat de la reconstruction d'une image radar pour un diffuseur ponctuel situé à une distance de 20 cm de la ligne de balayage, qui coïncide avec l'axe
Y sur le graphique. Le sondage et la restauration de l'image radar ont été effectués dans la gamme de fréquences de 6 à 12 GHz.
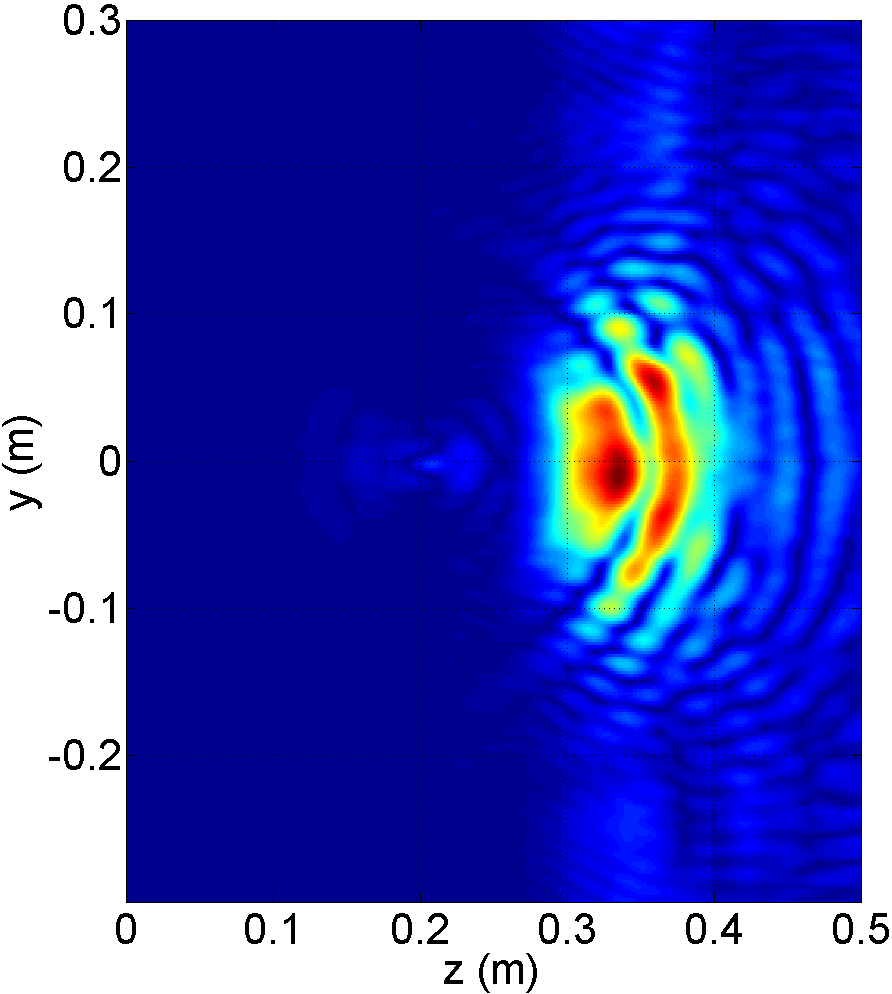 | 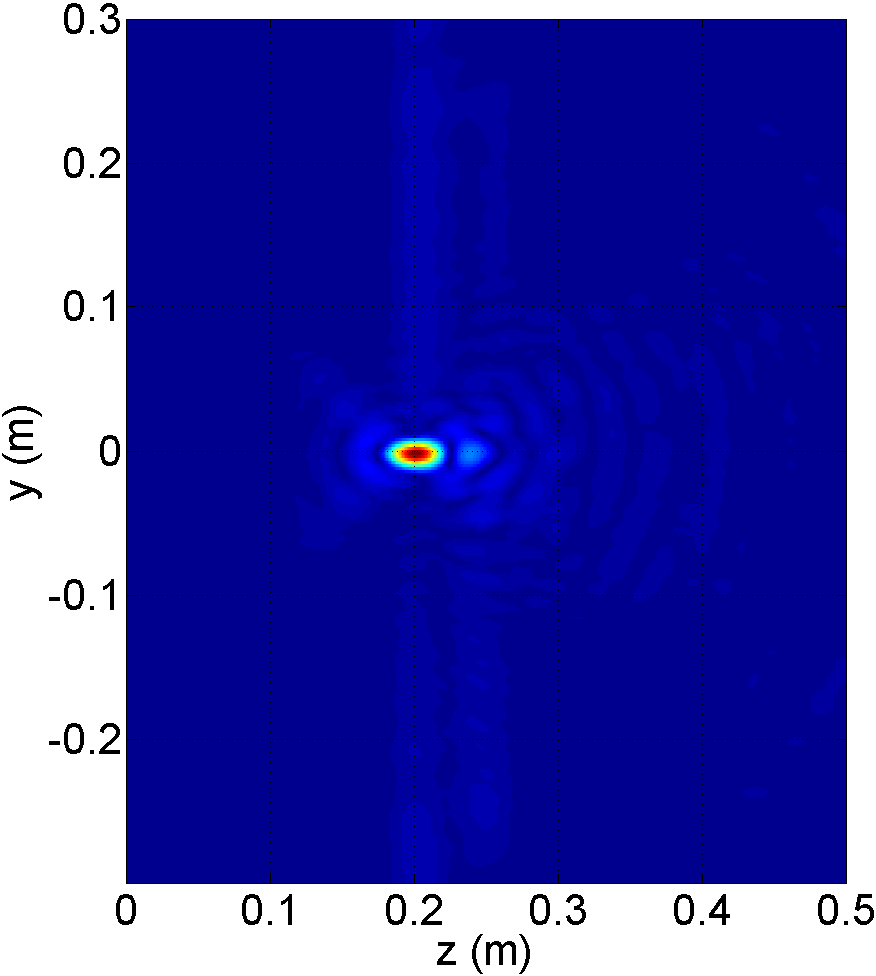 | 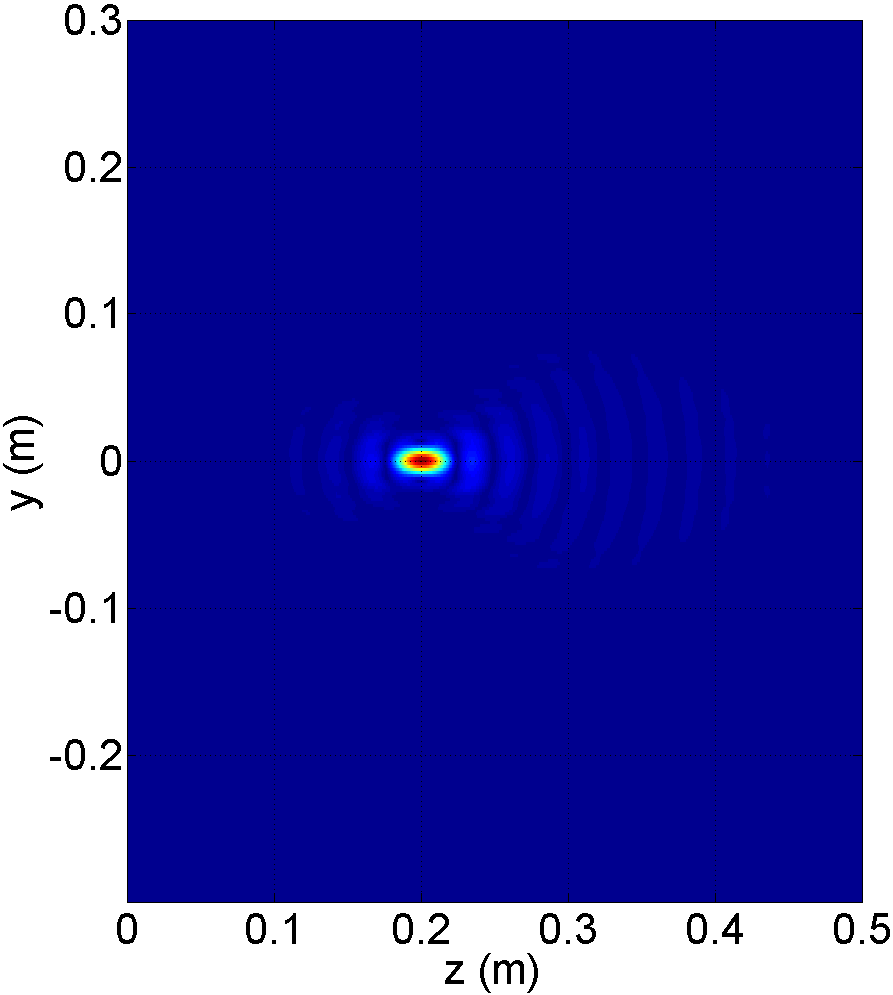 |
| Pas d'étalonnage d'antenne | Après l'étalonnage | Modèle |
|---|
| Image radar reconstruite d'un diffuseur à points |
La première image à gauche dans la figure ci-dessus a été obtenue après avoir étalonné les départs d'antenne pour la position médiane sur la ligne de balayage en utilisant les charges de référence (jeu d'étalonnage) pour l'analyseur de réseau vectoriel. On voit que le décalage des plans de mesure vers les extrémités des départs ne permet pas d'obtenir une image radar focalisée. La deuxième image montre l'image radar obtenue après calibrage de l'antenne et ajustement des données sources. La troisième montre une image de référence obtenue à la suite d'une simulation numérique.
Après avoir calibré le système d'antenne, il est possible de traiter les données obtenues lors d'expériences avec un mannequin avec un signal de sonde à large bande. Le traitement du signal radar a consisté en les étapes suivantes: trouver des points spécifiques sur l'image en niveaux de gris du mannequin; générer une grille dense associée à des points singuliers, dont chaque nœud est un point focal mobile pour le signal radar; trouver la trajectoire de points singuliers d'une image à l'autre; trouver la trajectoire des nœuds maillés denses; intégrer un signal radar focalisé pour chaque nœud maillé dense d'une trame à l'autre; visualisation du réseau de données résultant sous la forme d'une image radar.
La figure ci-dessous illustre l'extraction de points spécifiques et leur suivi sur une séquence d'images en demi-teintes d'un mannequin en mouvement. Chaque image en niveaux de gris correspond à un cadre de profondeur qui contient l'attribut de plage nécessaire pour chaque pixel en niveaux de gris.
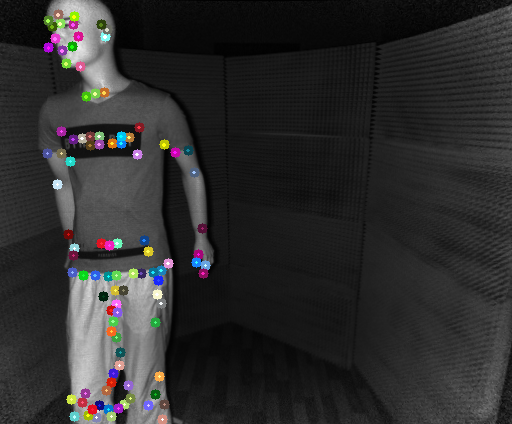 | 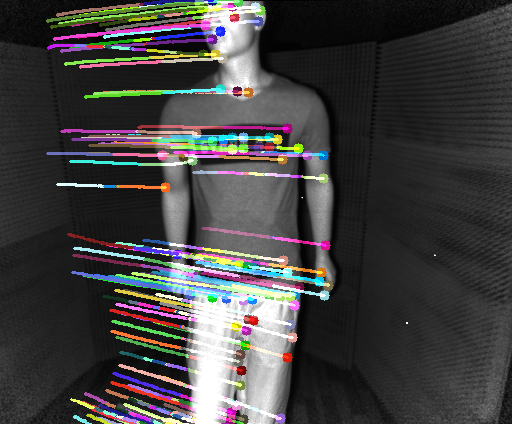 | 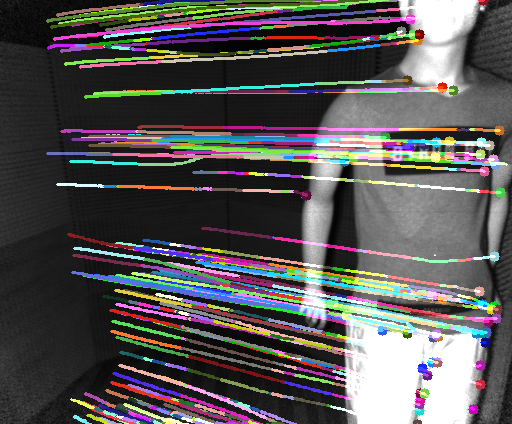 |
| 1ère image | Frame 101 | 201ème cadre |
|---|
| Suivi d'un mannequin sur une séquence d'images obtenue lors d'une expérience de simulation. |
Au stade actuel du projet, des expériences de simulation avec un mannequin ont été réalisées. La figure suivante représente un mannequin, sous les vêtements duquel divers objets représentant une menace étaient cachés: un couteau dans un étui, un pistolet à gaz derrière une ceinture en tissu et des morceaux de savon avec des boulons à la surface comme simulateur d'un engin explosif de fortune.

Dans une expérience de simulation avec le mannequin montré sur la figure, un signal avec une commutation de fréquence pas à pas dans la plage de 6 à 12 GHz avec un pas de fréquence de 250 MHz a été utilisé, à la suite de quoi le signal réfléchi a été enregistré à 25 fréquences. Le mannequin s'est déplacé à des intervalles de 1 cm à une distance totale de 100 cm à l'aide du module de déplacement linéaire. La ligne le long de laquelle les antennes ont été balayées avait également une longueur de 100 cm avec un pas d'échantillonnage de 1 cm. Le volume total des données radar était donc un réseau de nombres complexes de 101 à 101 à 25. La distance au mannequin variait de 150 à 110 cm le long de l'axe optique du capteur vidéo. La distance moyenne entre le mannequin et la ligne de balayage de l'antenne était de 80 cm.
La figure suivante montre l'image radar finale obtenue en se concentrant sur une séquence de couches depuis la surface du vêtement jusqu'à une profondeur de 2,5 cm et représentant les données obtenues dans la couche de surface par la projection de la valeur maximale.
, . . , , , , , , . , , , , .
9 3 . , , , - . , , . .
.
, , . .
. .
, . , - , .
, . , « », , . , , , , , .
 №15-19-30012.
№15-19-30012.Littérature
- DL McMakin, PE Keller, DM Sheen, and TE Hall, «Dual-surface dielectric depth detector for holographic millimeter-wave security scanners,» in Proc. SPIE 7309, Orlando, Florida, USA, Apr. 2009. [ Online ].
- BN Lyons, E. Entchev, and MK Crowley, «Reflect-array based mmwave people screening system,» in Proc. SPIE 8900, Dresden, Germany, Oct. 2013. [ Online ].
- SS Ahmed, «Personnel screening with advanced multistatic imaging technology,» in Proc. SPIE 8715, Baltimore, Maryland, USA, May 2013. [ Online ].
- A. Beeri and R. Daisy, «System and method for volume visualization in ultra-wideband radar imaging system,» USA Patent 9 354 307, May, 2016. [ Online ].
- A. Zhuravlev, V. Razevig, A. Tataraidze, M. Chizh, S. Ivashov, and A. Ivashov, «Experimental setup to simulate the performance of ISAR-based microwave personnel screening system,» in 2016 IEEE International Symposium on Phased Array Systems and Technology (PAST), Boston, MA, USA, 2016, pp. 1-7. [ Online ].
- A. Zhuravlev, V. Razevig, M. Chizh, and S. Ivashov, «Imaging of concealed objects on moving persons by creating synthetic aperture due to their natural motion,» in 2017 IEEE International Conference on Microwaves, Communications, Antennas and Electronic Systems (COMCAS), Tel Aviv, Israel, 2017, pp. 1-4.