Dans cet article, je vais discuter de la façon de fabriquer un projecteur laser assez simple à partir de pièces improvisées.
Présentation
Il existe deux méthodes pour créer des images à l'aide d'un laser: la numérisation vectorielle et tramée.
Dans le cas du balayage vectoriel, le faisceau laser se déplace dans l'espace le long des contours de l'image souhaitée, ne se déconnectant que pendant la durée de la transition d'un circuit à l'autre.
Pour cette raison, le laser s'allume la plupart du temps, grâce à quoi l'image résultante est assez lumineuse.
C'est cette méthode qui est couramment utilisée dans divers projecteurs laser industriels. Dans le même temps, pour le mouvement rapide du faisceau laser, il faut utiliser des appareils électromécaniques assez complexes - des galvanomètres. Leurs prix commencent généralement à 80 $ la paire, et à la maison les galvanomètres sont difficiles à produire (
quoique de façon réaliste ).
La deuxième méthode de création d'une image est une
numérisation raster . Dans cette méthode, le faisceau laser se déplace séquentiellement le long de toutes les lignes de l'image. Cette méthode est utilisée dans les tubes CRT des anciens téléviseurs et moniteurs.
Étant donné que les deux types de mouvements (verticalement et horizontalement) sont effectués de manière cyclique, la mécanique peut être considérablement simplifiée (par rapport au balayage vectoriel). De plus, étant donné que l'image en cours de formation est constituée d'éléments individuels, il est beaucoup plus facile de la former d'un point de vue logiciel.
L'inconvénient du balayage raster est que le faisceau passera le long de tous les éléments de l'image, même s'ils n'ont pas besoin d'être mis en évidence, ce qui entraîne une baisse de la luminosité de l'image.
Cette méthode, en raison de sa simplicité, j'ai voulu l'implémenter dans mon projecteur.
Il est très pratique d'utiliser un miroir tournant à vitesse constante pour déplacer le faisceau laser le long de la ligne (balayage horizontal). Du fait que la rotation est continue, la vitesse du faisceau peut être assez importante. Mais la transition d'une ligne à l'autre est plus difficile à mettre en œuvre.
L'option la plus simple consiste à utiliser plusieurs lasers destinés à un miroir rotatif. Les inconvénients de cette méthode - le nombre de lignes affichées sera déterminé par le nombre de lasers utilisés, ce qui complique la conception, et la largeur du miroir devrait être assez grande. Bien qu'il y ait des avantages - le seul élément mobile dans un tel système est un miroir, et l'utilisation de plusieurs lasers vous permet d'obtenir une luminosité d'image suffisamment élevée. Voici
un exemple de projecteur utilisant ce principe .
Une autre option de balayage que l'on peut trouver sur le réseau est la combinaison du balayage vertical et horizontal grâce à l'utilisation d'un miroir rotatif multiforme, dans lequel les miroirs faciaux individuels sont situés à différents angles par rapport à l'axe de rotation. Grâce à cette conception du miroir, lorsque le miroir est tourné d'une face à l'autre, le faisceau laser est dévié à différents angles verticalement, ce qui crée un balayage vertical.
Malgré la simplicité générale du projecteur résultant (vous n'avez besoin que d'un laser, d'un miroir avec un moteur et d'un capteur de synchronisation), la méthode a un gros inconvénient - la complexité de la fabrication d'un tel miroir multiforme à la maison. Typiquement, l'angle d'inclinaison des faces du miroir doit être ajusté pendant le processus d'assemblage, et cela doit être fait avec une grande précision, ce qui complique grandement la conception du miroir.
Voici
un exemple de projecteur utilisant ce principe .
Pour simplifier la conception, j'ai décidé d'utiliser un autre principe de balayage - un miroir en rotation constante pour former un balayage horizontal et un miroir oscillant périodiquement pour former un balayage vertical.
Implémentation
Balayage horizontal
Où puis-je me procurer un miroir à rotation rapide? D'une vieille imprimante laser!
Dans les imprimantes laser, un miroir multiforme (polygonal) monté sur l'arbre d'un moteur sans balais à grande vitesse est utilisé pour balayer le faisceau laser le long d'une feuille de papier. Habituellement, ce moteur est monté sur une carte de circuit imprimé, qui le contrôle.
J'avais déjà un module miroir approprié de l'imprimante:
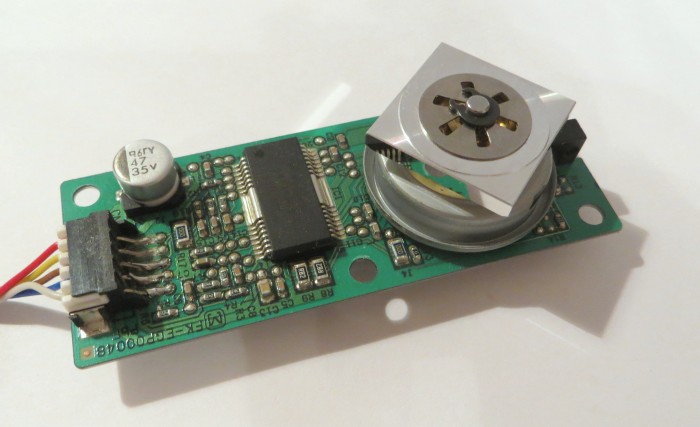
La documentation du module lui-même et du microcircuit utilisé dans celui-ci n'a pas pu être trouvée, afin de déterminer le brochage du module, j'ai dû procéder à une simple ingénierie inverse. Il est assez facile de trouver les lignes d'alimentation sur le connecteur - elles sont connectées au seul condensateur électrolytique de la carte. Cependant, simplement lorsque la puissance est appliquée, le moteur ne tourne pas - vous devez envoyer un signal d'horloge à la carte, qui détermine la vitesse de rotation. Ce signal est un simple méandre avec une fréquence de 20 à 500-1000 Hz (il peut être différent pour différents modèles).
Pour trouver la bonne ligne, j'ai pris un générateur d'impulsions réglé sur une fréquence de 100 Hz et connecté sa sortie via une résistance 470 à toutes les lignes libres du connecteur du module laser. Lorsqu'un signal a été envoyé à la ligne souhaitée, le moteur a commencé à tourner. La vitesse de rotation du miroir est très élevée, des mesures ultérieures ont montré qu'elle peut dépasser 250 tr / min. Mais, malheureusement, en raison de la vitesse de rotation élevée, mon module laser était assez bruyant. Pour les expériences, ce n'est pas un problème, mais pour un fonctionnement continu du projecteur, c'est mauvais. Il est possible qu'en utilisant un module miroir plus récent ou en installant la structure dans une boîte, les niveaux de bruit puissent être considérablement réduits.
Laser
Pour les premiers tests, j'ai utilisé un module laser à partir d'un pointeur bon marché. Le module doit être fixé de manière à pouvoir tourner sur plusieurs axes - cela est nécessaire pour diriger correctement le laser vers le miroir:
Étant donné qu'en raison de l'utilisation de la numérisation matricielle, la lumière laser est distribuée sur toute la zone d'image, la luminosité de l'image générée est plutôt faible - l'image ne peut être vue que dans l'obscurité.
Par conséquent, après avoir reçu l'image, j'ai remplacé le module laser par un autre qui utilise une diode laser à partir d'un DVD (
un exemple de fabrication d'un tel module ).
Attention - Le laser DVD est très dangereux pour la vue, tout travail avec un tel laser doit être effectué dans des lunettes de protection spéciales!
La conception de montage de ce module laser est la même que la précédente.
J'ai installé le laser et le module miroir polygonal sur une petite planche de panneau dur. Le laser doit être monté dans le même plan que le miroir. Après avoir appliqué la puissance du signal d'horloge au moteur et la puissance au laser, vous devez régler le laser de sorte que son faisceau touche le bord du miroir. Par conséquent, lorsque le miroir polygonal tourne, une longue ligne laser horizontale est formée.
Synchronisation du photocapteur
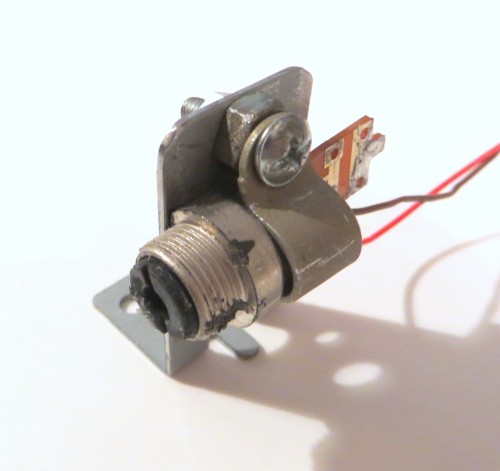
Pour que le microcontrôleur de contrôle puisse suivre la position d'un faisceau laser en mouvement, un capteur photoélectrique est nécessaire. En tant que photodétecteur, j'ai utilisé une photodiode, recouverte d'un morceau de carton avec une fente. La fente est nécessaire pour détecter plus précisément le moment où le faisceau frappe la photodiode.
Voici le support de la photodiode (sans carton avec une fente):

Pendant le fonctionnement normal du moteur, le faisceau laser réfléchi doit d'abord frapper le photocapteur, puis - sur le miroir vertical.
Une fois le capteur installé, j'ai vérifié son fonctionnement en lui appliquant une tension via une résistance. J'ai observé le signal du capteur avec un oscilloscope - son amplitude était suffisante pour connecter le capteur directement à l'entrée GPIO du microcontrôleur.
Balayage vertical
Comme je l'ai mentionné plus tôt, j'ai utilisé un miroir oscillant périodiquement pour former un balayage vertical. Comment puis-je faire un tel lecteur miroir?
L'option la plus simple consiste à utiliser un électro-aimant chargé. Parfois, les conceptions les plus simples des projecteurs laser utilisent des miroirs fixés aux haut-parleurs conventionnels. Mais une telle solution présente un grand nombre d'inconvénients (mauvaise répétabilité des résultats, faible fabricabilité de la conception, difficulté de calibration).
Dans la conception de mon projecteur, j'ai décidé d'utiliser un moteur DVD BLDC pour piloter un miroir vertical. Étant donné que le projecteur était initialement prévu pour la sortie de texte, cela signifiait qu'il y aurait peu de lignes affichées, ce qui signifie que le miroir doit être tourné d'un petit angle.
Le moteur BLDC du DVD contient trois enroulements qui font partie du
stator . Si l'un des enroulements est connecté à une source de tension positive et que les deux autres sont connectés en alternance avec son moins, le
rotor du moteur oscille. L'amplitude angulaire maximale des oscillations est déterminée par la conception du moteur, en particulier par le nombre de ses pôles. Pour un moteur DVD, cette plage ne dépasse pas 30 degrés. En raison de la puissance suffisamment grande d'un tel moteur, de la facilité de contrôle (vous n'avez besoin que de deux touches), du mouvement de rotation, ce moteur est très bien adapté à la fabrication d'un simple projecteur laser texte.
Voici mon moteur avec un miroir collé dessus:

Il convient de prêter attention au fait que la surface réfléchissante du miroir doit être à l'avant, c'est-à-dire non recouverte de verre.
Le design dans son ensemble
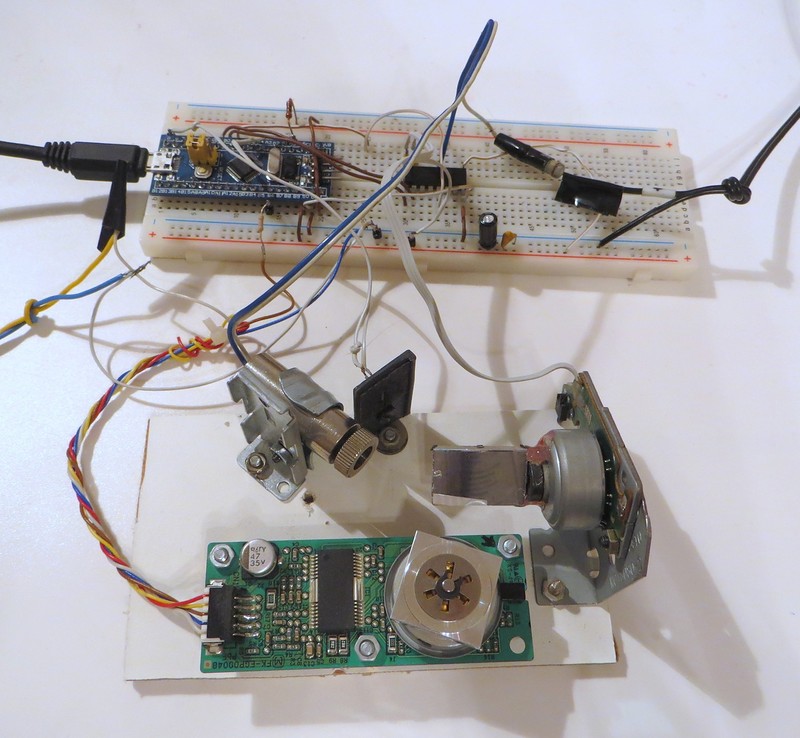
Voici à quoi ressemble tout le projecteur:
Gros plan sur la partie de projection:
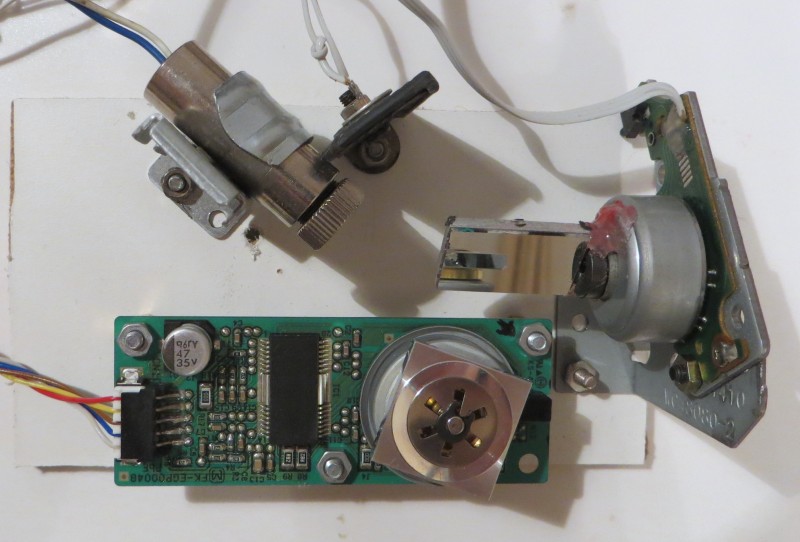
Le miroir polygonal tourne dans le sens horaire, de sorte que le faisceau laser se déplace de gauche à droite.
Une puissante diode laser DVD (à l'intérieur du collimateur) est déjà installée ici. Le miroir vertical est réglé de telle sorte que l'image projetée soit dirigée vers le haut - dans mon cas, vers le plafond de la pièce.
Comme le montre la photo, la mécanique du laser et du projecteur est contrôlée par le microcontrôleur stm32f103 monté sur une petite carte de débogage (Blue Pill). Cette carte est insérée dans la planche à pain.
Schéma de conception:
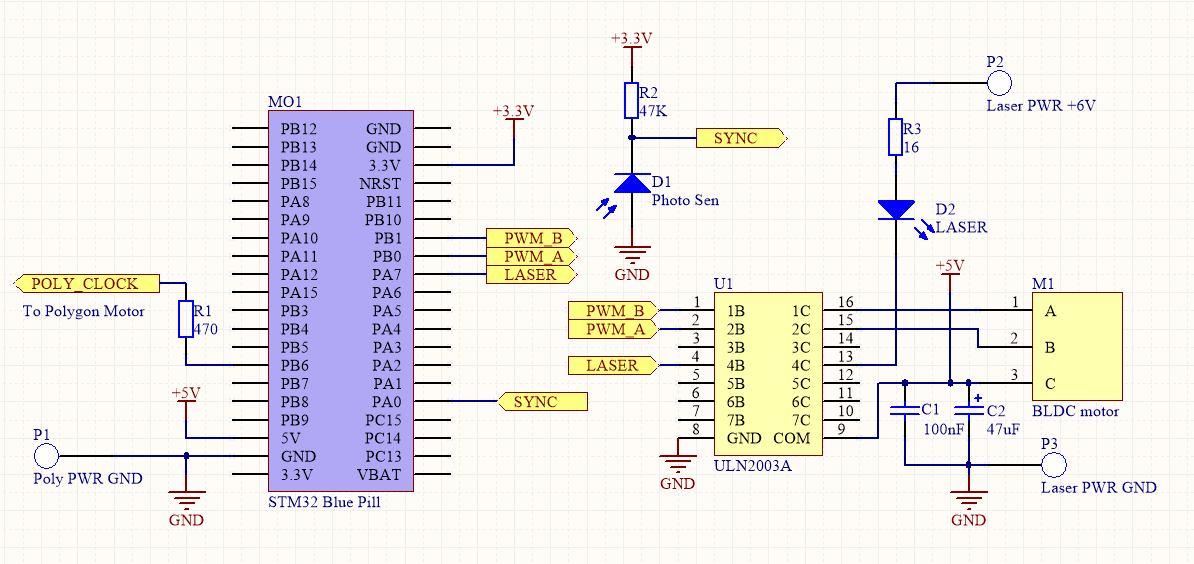
Comme je l'ai mentionné plus tôt, pour contrôler le moteur d'un miroir polygonal, un seul signal est nécessaire - une horloge ("POLY_CLOCK"), qui est générée par l'un des temporisateurs stm32, fonctionnant en mode PWM. La fréquence et le rapport cyclique de ce signal restent inchangés pendant le fonctionnement du projecteur. Pour alimenter la carte moteur, j'utilise une alimentation 12 V séparée.
Deux signaux PWM pour contrôler la position du miroir vertical forment une autre minuterie du microcontrôleur. Ces signaux sont connectés à la puce ULN2003A, qui contrôle le moteur depuis le DVD. Ainsi, en réglant les différents rapports cycliques des canaux PWM de cette minuterie, vous pouvez changer l'angle de rotation du moteur.
Malheureusement, dans sa forme actuelle, le design n'a pas de retour sur la position du miroir. Cela signifie que le microcontrôleur peut mettre les miroirs en mouvement, mais il ne «connaîtra» pas sa position actuelle. En raison de l'inertie du rotor du moteur et de l'inductance des bobines, un changement dans la direction du mouvement du miroir se produit également avec un certain retard.
Tout cela entraîne deux conséquences:
- La densité des lignes est variable. Cela est dû au fait que la vitesse de rotation du miroir n'est pas contrôlée.
- Une partie considérable des lignes ne peut pas être utilisée. Le miroir vertical oscille cycliquement, de sorte qu'une partie du temps de la ligne peut être affichée de haut en bas, et l'autre partie de bas en haut. Par conséquent, en raison du manque de données de position, il est nécessaire d'afficher les lignes uniquement lorsque le moteur se déplace dans une direction. Étant donné qu'une partie seulement des lignes est affichée, la luminosité de l'image diminue (c'est-à-dire que le laser n'est pas entièrement utilisé).
Cependant, en raison du manque de rétroaction, la conception est très simple.
Le processus de formation d'image par le projecteur est également assez simple:
- Chaque fois qu'un faisceau laser frappe la photodiode, une interruption est générée dans le microcontrôleur.
Dans cette interruption, le contrôleur détermine la vitesse horizontale actuelle. Après cela, une minuterie de synchronisation spéciale est réinitialisée. C'est le moment de la synchronisation. - Ce temporisateur de synchronisation à certains moments génère ses interruptions correspondant aux moments souhaités dans le balayage horizontal.
- En particulier, quelque temps après le moment de la synchronisation, il est nécessaire de commencer à générer un signal de commande laser. Dans ma conception, je le forme à l'aide du bundle DMA + SPI. En effet, en utilisant ces modules au bon moment, l'une des lignes d'image est envoyée bit par bit à la sortie MOSI SPI.
- Une fois la sortie de l'image dans la ligne terminée, vous devez forcer le laser à s'allumer. Cela est nécessaire pour que la photodiode puisse à nouveau recevoir sa lumière.
La modulation laser est également implémentée avec l'une des clés de la puce ULN2003A. La résistance R3 est nécessaire pour la protection la plus simple de la diode laser contre trop de courant. Il est monté directement sur l'extrémité du fil laser et est isolé. J'ai utilisé une
alimentation électrique réglable séparée pour alimenter le laser. Il est important de contrôler le courant consommé par le laser et de s'assurer qu'il ne dépasse pas la valeur maximale autorisée pour la diode laser utilisée.
Un exemple d'image générée (police d'une hauteur de 8 lignes):
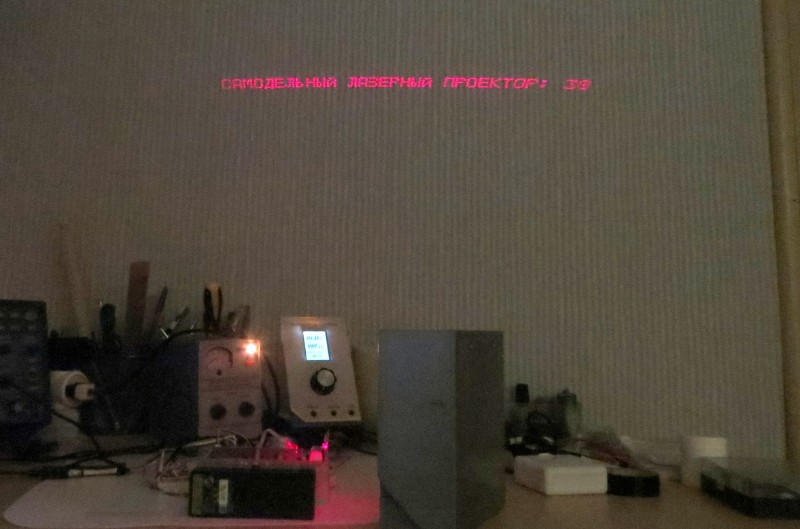
Une certaine distorsion des proportions du texte due au fait que le projecteur brille sur le mur à un angle.
Or, chaque cycle d'oscillations d'un miroir vertical se compose de 32 pas (un pas correspond à la rotation du miroir polygonal par 1 face).
Dans l'implémentation actuelle, le projecteur peut produire environ 14 lignes complètes, les lignes restantes fusionnent les unes avec les autres ou se mélangent incorrectement avec les autres.
La police au début de l'article utilise également une police d'une hauteur de 8 lignes. Comme vous pouvez le voir, même deux lignes de texte sont plus ou moins affichées normalement.
Dans le même temps, la table du générateur de caractères de ce projet contient des polices de 12 et 6 lignes de haut:

Sur cette photo, une densité de ligne variable est clairement visible.
Un exemple de ligne rampante affichée par un tel projecteur:
Sur la vidéo, l'image scintille verticalement, en réalité, cet effet est invisible à l'œil.
→
Fichiers de projet