Les difficultés de construction, combien coûte le robot, la réglementation, qui semble être là, mais en fait pas, et ce qui se passe sur le salon.
Beaucoup de nos décisions peuvent sembler controversées, mais si vous les examinez du point de vue des termes initiaux, tout semble un peu plus logique.
Attention! Sous la coupe, beaucoup de photos.
Nous avons commencé à discuter du robot le 25 août, et selon les exigences initiales des organisateurs, le robot fini aurait dû être soumis avant le 4 septembre. Nous avons parfaitement compris que cette période serait décalée, mais combien est une grande question, et cela compliquerait grandement nos vies. Pour l'avenir, je dirai que le robot nous a quittés début octobre.
 (réducteur sans parois)
(réducteur sans parois)Type de robot et limites
Lors du choix d'un concept, nous avons simplement examiné quels robots existent et comment ils se battent:
- Flipper (robot, généralement avec une benne pneumatique). L'une des options les plus gagnantes, car il peut revenir à la bonne position avec son arme. Selon les règles, un robot qui ne bouge pas longtemps perd. Nous avons rejeté cette option en raison d'éventuelles difficultés avec la pneumatique, il n'y avait pas de spécialistes en pneumatique dans notre équipe et nous n'avons pas eu le temps de la modifier encore plus.
- Un robot avec une scie verticale ou horizontale. Dans presque toutes les vidéos, ces robots avaient l'air bien avant la bataille, mais l'arme a refusé au premier coup et n'a généralement pas causé de dommages aux adversaires, à l'exception des rayures.
- Une arme en forme de hache, un support sur un support semble très peu fiable et il n'est pas facile de percer le métal de 5 mm autorisé par les règles.
- Le robot sous le nom désormais populaire de «spinner» (un faisceau massif tournant au-dessus du robot) nous a semblé le plus facile à fabriquer et contenant le moins de moments non vérifiés dans la conception.
- Les robots avec un volant à l'avant sont également à la mode maintenant, mais ils sont technologiquement similaires à notre choix, et ils n'ont pas de protection circulaire avec des armes.
Selon la réglementation, il existe deux limitations principales:
- poids - 110 kg;
- dimensions pas plus de 1200x1200.
Lors de ce salon, les miracles ont fonctionné avec la réglementation - nous avons été coordonnés pendant deux semaines avec une paroi de la boîte de vitesses de l'arme 6 mm, et non 5, car elle était déjà découpée (bien que tout ce qui concerne l'arme ne dispose pas de ces restrictions). En conséquence, des robots avec une paroi de 10-15 mm et une hauteur de 100 mm avec une hauteur minimale de 300 mm ont été autorisés à être mis en place. En Russie maintenant, si je comprends bien, deux grandes organisations mènent des combats de robots. Si vous souhaitez participer aux deux projets, il convient de rappeler que ces derniers ont des dimensions maximales de 1500x1000.
 (procédé de soudage des pales)
(procédé de soudage des pales)La gestion
En fait, il n'y a pas beaucoup d'alternatives de gestion. Faites le vôtre ou achetez des modèles prêts à l'emploi à partir de modèles radiocommandés. Mais dans ce cas, ni en termes de coût ni de temps, je ne vois aucune raison de faire mon propre truc, ce sera plus cher et plus long, même en tenant compte du fait qu'à bord, il y a encore de l'électronique de sa propre conception. Oui, et une télécommande normale et ergonomique fait un plaisir douteux. Selon la réglementation, l'équipement doit prendre en charge la fonction Fail-safe, en cas de perte d'un signal de l'émetteur, le récepteur traduit tous les canaux à une valeur prédéterminée (l'arme est éteinte, arrêtant le mouvement). Nous avons défini deux ensembles de contrôle, et en cas d'endommagement du principal, le système est passé de la commande à la sauvegarde de l'extérieur.
De plus, les anciens systèmes de contrôle n'ont pas d'algorithme pour fonctionner à différentes fréquences et fonctionnent sur un canal fixe. Dans la pratique, cela a conduit au fait que lors des performances de démonstration, une équipe n'a pas pu se déplacer - les microphones radio et les émissions vidéo occupaient complètement la chaîne.
 (pneumatiques pour moteurs d'armes, joints PTFE)
(pneumatiques pour moteurs d'armes, joints PTFE)Mouvement
Parmi les choix disponibles sont des moteurs automoteurs avec des contrôleurs de course, une batterie pour trois minutes de combat avec une marge. La plupart des équipes du monde aussi, après le moteur, la boîte de vitesses et le dernier maillon est la chaîne à la roue. Pour nous, tout va bien, sauf la boîte de vitesses. Ils ne pouvaient pas être trouvés en stock, mais pour en faire une énorme couche de travail.
De disponibles ici et maintenant, il y avait des roues de moteurs de scooters gyroscopiques. 4 roues de 350 watts chinois chacune auraient dû suffire avec une marge et une garantie, donc c'est essentiellement sorti, mais plus à ce sujet plus tard. Parmi les difficultés qui iront dans cette voie - la tension des roues motrices des scooters gyroscopiques 36V, les modèles de régulateurs pour une telle tension sont généralement des hélicoptères et n'ont pas de marche arrière, nous l'avons acheté presque accidentellement. Pour contrôler les moteurs, vous pouvez fabriquer votre régulateur immédiatement avec le modèle de contrôle (de 1 ms à 2 ms à la sortie du récepteur, selon la position des boutons), mais il faudrait plus de deux semaines pour payer la carte, les pièces et le débogage, et au moment de l'achat des contrôleurs de vélo, à en juger par les critiques, il n'y a eu aucune plainte - ils ont juste fait un convertisseur PWM → 0-5V dans les cartes de contrôle.
À notre avis, compte tenu de l'expérience acquise, la solution idéale pour 110 kg du robot est deux roues et à partir de 800W de puissance totale.
 (verrou de verrouillage, un peu sauvé nos bras et nos jambes)
(verrou de verrouillage, un peu sauvé nos bras et nos jambes)Arme
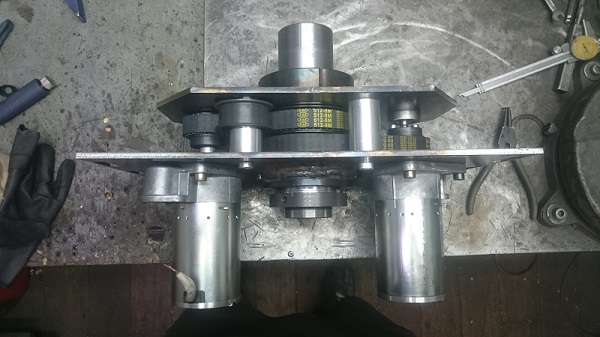
En termes de puissance et de redondance, nous avons d'abord décidé que le rotor à marteaux ferait tourner deux moteurs. Pendant une semaine, à part les démarreurs automatiques (1,5 kW, 12V), rien n'est venu. Cette décision s'apparentait à l'attaque d'un râteau chauffé au rouge. Le coordinateur technique du projet, avec beaucoup de doute, a déclaré que beaucoup ont essayé avant nous, mais n'ont pas réussi. Après avoir tout raconté à nouveau, nous avons décidé que tout irait bien. Donc c'était presque ... jusqu'aux derniers jours avant l'expédition. La vitesse de démarrage est d'environ 3000 par minute sans charge, et comme il est nécessaire de permettre aux robots ennemis de pénétrer dans la zone du marteau, et pas seulement de les rayer, ils ont décidé de réduire la vitesse à ~ 1500 avec un engrenage par courroie, qui à la vitesse de l'ennemi de 10 km / h a fourni une «approche» pour 70 mm à la zone du marteau. Le prototype japonais avait 7 petits moteurs qui faisaient tourner une grande vitesse. Un engrenage de courroie a été choisi pour des raisons temporaires, des poulies sont disponibles et les courroies sont commandées en deux à trois jours, en plus pour protéger les moteurs de la destruction lorsque le rotor s'arrête brusquement.
 (la photo représente un assemblage de textolite et un broyage à la brosse fabriqués par CNC)
(la photo représente un assemblage de textolite et un broyage à la brosse fabriqués par CNC)Électronique
La plupart des robots ont des composants de modèles radio installés, mais nous sommes confrontés au fait que le relais du modèle acheté est brièvement activé (100-200 ms) lorsque l'alimentation est appliquée quelle que soit la position des commandes de l'émetteur. Étant donné que dans notre circuit, 30 kg de rotor ont commencé à tourner, l'utilisation de ce relais était dangereuse, mais comme il y avait un contrôleur à bord de chaque carte, ils ont amené un autre canal du récepteur et ont allumé le relais à travers un filtre.
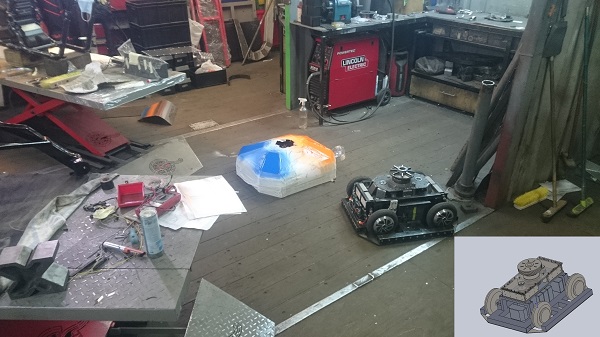 (processus de peinture, quelques différences dans la disposition de la première option par rapport à la finale sont visibles à droite)
(processus de peinture, quelques différences dans la disposition de la première option par rapport à la finale sont visibles à droite)Nom, équipe et logo du robot
C'était la tâche la plus facile de toutes. La moitié de notre équipe fabrique des motos personnalisées sur commande - ils ont pris leur logo et leur nom. Le second semestre développe des composants électroniques pour les trains électriques modernes, notamment des convertisseurs de traction d'une capacité supérieure à MW.
 (amortisseur pour protéger la boîte de vitesses et les moteurs)
(amortisseur pour protéger la boîte de vitesses et les moteurs)Les difficultés que nous avons
Le robot entier est en fait deux systèmes - la traction et les armes. Nous avons eu des problèmes avec les deux.
En termes de traction, tout allait bien, jusqu'à ce que les marteaux soient installés sur le rotor. Après cela, le robot a catégoriquement refusé de se retourner et les contrôleurs ont commencé à s'épuiser.
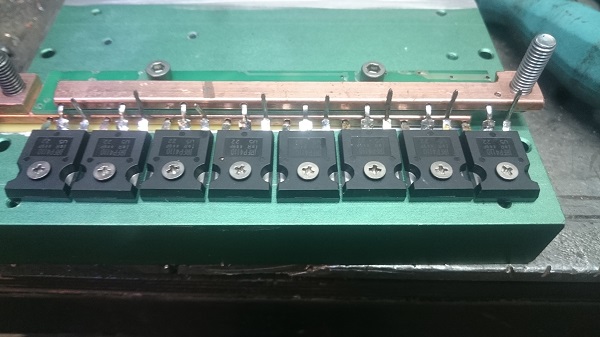
Ils n'ont pas pu déterminer rapidement la cause de l'épuisement du contrôleur, car ils n'étaient pas tous brûlés. Mais encore une fois, j'écris qu'il n'y avait pas de temps et nous avons considéré que les transistors de puissance brûlent par surtension, car l'inertie du robot est grande et l'algorithme du contrôleur pourrait être défectueux. Nous avons assemblé un circuit avec un hacheur pour drainer toutes les surtensions vers une résistance, amené un oscilloscope, connecté un hacheur et constaté que la tension monte à un maximum de 5 V. Il n'y avait pas d'excès dans le courant, plus d'idées aussi. Nous avons remplacé les transistors brûlés par des transistors normaux, et un miracle s'est produit - il n'y avait plus de problèmes avec eux, même sur le salon. C'est juste un lot de transistors défectueux (ici, nous rappelons le cas où nous avons été mis en production des microcircuits vides à l'intérieur, mais avec un marquage normal).
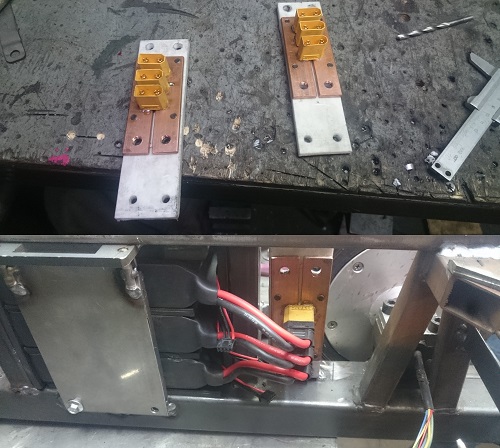
 (bus avec transistors pour le régulateur de courant, qui finalement n'a pas été utilisé par nous, car il fonctionnait au bord de la surchauffe)
(bus avec transistors pour le régulateur de courant, qui finalement n'a pas été utilisé par nous, car il fonctionnait au bord de la surchauffe)Le deuxième problème concerne les batteries de traction. En termes d'économie et d'accessibilité, ils les ont empruntés à des scooters gyroscopiques. Ils sont tous bons, à l'exception du courant maximum. En moyenne, une telle batterie ne donne pas plus de 50A et s'éteint lorsqu'elle est surchargée. Nous, au sommet, en avions besoin de plus, car une batterie pour deux contrôleurs (les roues avant et arrière sont alimentées et contrôlées séparément pour la sauvegarde). J'ai dû démonter la batterie et déconnecter physiquement cette protection, mais il vaut la peine de comprendre qu'il s'agit d'une méthode controversée et n'est autorisée que pour des surcharges très courtes et rares.
Sur quatre roues, pour déployer 100 kg en place, selon mes sentiments, il faut au moins honnête 1,2 kW. Sur deux, cette exigence chute fortement à 500W. La manœuvre même pour un robot de «défense circulaire» s'est avérée très importante. Nous avons sous-estimé ce facteur et maintenant nous transférons le robot dans une version à deux roues.
Le plus «agréable» nous attendait après avoir montré aux organisateurs un robot fini, mais sans marteaux sur les lames. Autrement dit, techniquement, le robot était autorisé, mais en fait, les démarreurs ont brûlé 7-12 secondes après le lancement, et les marteaux ont eu de la chance au dernier moment.
Plusieurs mesures ont été prises: broyage des assemblages de brosses, production d'un porte-brosses en plastique fondant de PCB sur PCB. Ces mesures ont considérablement réduit les pertes, mais la puissance de sortie était trop élevée.
 (fin de l'installation)
(fin de l'installation)Il restait trois jours avant l'expédition, un régulateur de courant fiable à 200A, pour cette période, il n'était pas possible de le faire à partir des pièces qui se trouvaient à Saint-Pétersbourg, mais n'a pas pu trouver de livraison en une journée. Nous avons dû faire un pas désespéré, réduire la vitesse de plus de deux fois, dire au revoir à la réservation d'armes et allumer les moteurs séquentiellement. Ces mesures ont aidé sur place, il n'y avait plus de problèmes avec les moteurs. En ce moment, sans hâte, nous recherchons d'autres moteurs. Les démarreurs fonctionnent de manière stable, mais leur utilisation ne peut être justifiée par autre chose que par des termes (au total pour les tests et le stock, nous avons acheté 7 démarreurs).
Coût
Le coût final du robot est d'environ 230 tr. C'est avec toutes les pièces de rechange, doubles commandes, démarreurs brûlés et tout le reste. Si cela se fait à un rythme plus calme, je pense que vous pouvez rencontrer les 190 mille. Le fichier fonctionne, donc tout n'est pas divisé en sections, mais pas ajusté.

Afficher
En conséquence, nous avons participé à 3 batailles. Il s'agit d'une destruction démonstrative du moniteur, d'une bataille de qualification et d'une bataille démonstrative de l'assistant German Gref et d'une personne du gouvernement. Comme je n'ai pas les droits de diffusion de l'émission, je vais insérer une vidéo avec la destruction de la télévision, tournée par nous:
Dans la 3ème bataille, le rotor nous a arraché et l'axe avec le roulement a été tourné à l'ennemi. Nous avons changé les boulons pour des boulons plus puissants, mais en fait c'était le cas le plus difficile, car le matanga ennemi tournait dans la direction vers laquelle notre rotor faisait face.
D'une réparation nocturne inoubliable d'un robot dans les boites de la formule un:

Le jugement a laissé beaucoup de questions, et pas seulement notre équipe. Dans notre bataille, un robot a été autorisé à participer, avec des armes non fonctionnelles au départ, ce qui s'est poursuivi. Les organisateurs nous ont proposé des «combats controversés» assez étranges pour ceux qui ont abandonné dans le doute, mais nous avons refusé, parce que nous avons réussi ou non. Il n'y a pas de deuxième poisson.
Avec l'admission des robots vaut également la peine de réfléchir. Lorsque plus d'un tiers des robots ne respectent pas les règles, mais sont autorisés à entrer dans la grille principale, cela est étrange et ne conduit certainement pas à une confiance accrue.
Le règlement contient des phrases générales selon lesquelles «un robot ne doit pas être indestructible». Cette phrase devrait être supprimée ou clarifiée. Prenez le gagnant - c'est une nageoire parfaitement assemblée avec un cadre tubulaire, qu'est-ce qui est destructible pour lui? Depuis sa plate-forme élévatrice est considérée comme une arme, à son début un épaississement de plus de 5 mm. Flippers a gagné l'année dernière. Pour l'intérêt pour le spectacle, il est clairement utile d'envisager d'égaliser les chances afin de ne pas obtenir de palmes dans les prochains spectacles - la bataille de deux palmes est un spectacle assez ennuyeux. Sur la base de la «critique-offre», je vois une solution pour retirer les côtés, car le flipper jette simplement tous les adversaires là-bas et la bataille est décidée dans les premières secondes. Le fait que le gagnant de cette année ait rejeté les robots était sa bonne volonté et non le fait que d'autres feront de même, mais cela affecte grandement l'impression du spectacle. Les vis doivent également être placées près du verre, sinon le seul type de robot pouvant y être lancé est le flipper.
Le spectacle pour le public était super. Son, lumière, script - vraiment cool et excitant. Danseurs brillants - l'idée n'est pas nouvelle, mais je l'ai vue en direct pour la première fois et elle s'est également accrochée (nous avons réussi à réparer l'un de ces costumes quelques secondes avant la représentation lors du spectacle final, malgré le fait que nous n'y ayons pas participé - du moins à certains égards) . Je suis reconnaissant à ces personnes qui ont effectué un travail aussi énorme. La barre a été élevée extrêmement haut, nous suivrons l'évolution des événements.
P.S. L'article s'est révélé un peu sur le robot et un peu sur le spectacle, mais à mon avis, je ne me suis pas inspiré de deux articles distincts, et les diluer avec la façon dont nous avons visité Skype Park, Rosa Khutor et que nous avons rencontrés serait une décision douteuse pour une ressource technique.