Présentation
Dans un
article précédent , le processus de transformation de Qt Creator en un IDE à part entière pour les projets sur la plate-forme Arduino a été décrit. Les étapes ont été décrites en détail, mais sans description de la signification de ce qui se passe, donc l'effet d'un tel article est faible. Dans chaque cas, diverses nuances peuvent surgir et surviennent et il est difficile de les comprendre sans comprendre comment le projet est organisé.
Par conséquent, dans cet article, nous comprendrons la structure et les paramètres du projet.
1. Arduino Core et fonction main ()
Comme vous le savez, l'exécution de tout programme en C / C ++ commence par la fonction main (), y compris le firmware du microcontrôleur. Sous une forme ou une autre, cette fonction est présente dans tout projet. Lors de la création d'un projet dans l'IDE Arduino, on nous propose immédiatement un fichier d'esquisse (également avec une stupide extension * .ino), cachant l'emplacement du point d'entrée au développeur.
Dans Arch, les sources Arduino Core sont situées le long du chemin
/ usr / share / arduino / hardware / archlinux-arduino / avr / cores / arduino et contiennent les éléments suivants
Liste des fichiers Arduino Core$ ls -l 320 -rw-r--r-- 1 root root 1222 3 2017 abi.cpp -rw-r--r-- 1 root root 7483 3 2017 Arduino.h -rw-r--r-- 1 root root 11214 3 2017 binary.h -rw-r--r-- 1 root root 8078 9 2017 CDC.cpp -rw-r--r-- 1 root root 1529 3 2017 Client.h -rw-r--r-- 1 root root 2605 3 2017 HardwareSerial0.cpp -rw-r--r-- 1 root root 2315 3 2017 HardwareSerial1.cpp -rw-r--r-- 1 root root 1975 3 2017 HardwareSerial2.cpp -rw-r--r-- 1 root root 1975 3 2017 HardwareSerial3.cpp -rw-r--r-- 1 root root 7743 3 2017 HardwareSerial.cpp -rw-r--r-- 1 root root 5262 3 16:57 HardwareSerial.h -rw-r--r-- 1 root root 4469 3 2017 HardwareSerial_private.h -rw-r--r-- 1 root root 1142 3 2017 hooks.c -rw-r--r-- 1 root root 2851 3 2017 IPAddress.cpp -rw-r--r-- 1 root root 2861 3 2017 IPAddress.h -rw-r--r-- 1 root root 1372 3 2017 main.cpp -rw-r--r-- 1 root root 1027 3 2017 new.cpp -rw-r--r-- 1 root root 979 3 2017 new.h -rw-r--r-- 1 root root 2725 3 2017 PluggableUSB.cpp -rw-r--r-- 1 root root 2063 3 2017 PluggableUSB.h -rw-r--r-- 1 root root 1335 3 2017 Printable.h -rw-r--r-- 1 root root 5442 3 2017 Print.cpp -rw-r--r-- 1 root root 2963 3 16:57 Print.h -rw-r--r-- 1 root root 963 3 2017 Server.h -rw-r--r-- 1 root root 8804 3 17:23 Stream.cpp -rw-r--r-- 1 root root 6060 3 17:23 Stream.h -rw-r--r-- 1 root root 15022 3 2017 Tone.cpp -rw-r--r-- 1 root root 4363 18 16:52 Udp.h -rw-r--r-- 1 root root 6261 3 16:57 USBAPI.h -rw-r--r-- 1 root root 20086 18 16:52 USBCore.cpp -rw-r--r-- 1 root root 8435 3 2017 USBCore.h -rw-r--r-- 1 root root 1519 3 2017 USBDesc.h -rw-r--r-- 1 root root 4576 3 2017 WCharacter.h -rw-r--r-- 1 root root 9409 3 2017 WInterrupts.c -rw-r--r-- 1 root root 7850 3 2017 wiring_analog.c -rw-r--r-- 1 root root 12024 3 2017 wiring.c -rw-r--r-- 1 root root 4978 3 2017 wiring_digital.c -rw-r--r-- 1 root root 2255 3 2017 wiring_private.h -rw-r--r-- 1 root root 3435 3 2017 wiring_pulse.c -rw-r--r-- 1 root root 6022 3 2017 wiring_pulse.S -rw-r--r-- 1 root root 1550 3 2017 wiring_shift.c -rw-r--r-- 1 root root 1641 3 2017 WMath.cpp -rw-r--r-- 1 root root 16989 3 2017 WString.cpp -rw-r--r-- 1 root root 9910 3 2017 WString.h
La fonction main () se trouve dans le fichier main.cpp et ressemble à ceci
#include <Arduino.h> // Declared weak in Arduino.h to allow user redefinitions. int atexit(void (* /*func*/ )()) { return 0; } // Weak empty variant initialization function. // May be redefined by variant files. void initVariant() __attribute__((weak)); void initVariant() { } void setupUSB() __attribute__((weak)); void setupUSB() { } int main(void) { init(); initVariant(); #if defined(USBCON) USBDevice.attach(); #endif setup(); for (;;) { loop(); if (serialEventRun) serialEventRun(); } return 0; }
On peut voir qu'il n'y a rien de surnaturel dans l'esquisse: les fonctions setup () et loop () sont appelées directement depuis main (). Le fichier led-blink.cpp que nous avons
créé précédemment contient les définitions de ces fonctions. Si nous supprimons ce fichier du projet
# #INCLUDEPATH += ./include #HEADERS += $$files(./include/*.h) # #SOURCES += $$files(./src/*.cpp)
nous obtenons une erreur de l'éditeur de liens logique

Ainsi, tous les modules que nous ajoutons au projet seront liés au noyau Arduino, qui implémente les fonctionnalités de base. Voici une brève description des en-têtes Arduino Core:
- Arduino.h - l'en-tête de base, y compris les en-têtes de la bibliothèque C standard, les définitions de l'interface du programme avec les registres du contrôleur AVR, les définitions de macro de base utilisées dans la programmation
- binary.h - définitions de macro pour écrire des nombres de 0 à 255 sous forme binaire
- Client.h - Classe de client Ethernet
- HardwareSerial.h, HardwareSerial_private.h - bibliothèque pour travailler avec le matériel UART
- IPAddress.h - fonctionne avec les adresses IP des protocoles Ethernet
- new.h - implémentation des opérateurs C ++ nouveaux et supprimés
- PluggableUSB.h, USBAPI.h, USBCore.h, USBDesc.h - bibliothèque pour implémenter des périphériques USB
- Print.h, Printable.h, Stream.h - bibliothèques pour travailler avec des flux de données symboliques, y compris ceux transmis via UART
- Server.h - une classe qui implémente le serveur Eternet
- Udp.h - Implémentation du protocole UDP
- WCharacters.h, WString.h - classes pour travailler avec des caractères et des chaînes
- câblage_private.h - la bibliothèque de la plate-forme de câblage , sur la base de laquelle le noyau Arduino est construit. Cette bibliothèque implémente une interface de niveau relativement élevé avec les ressources système des microcontrôleurs.
Ainsi, même dans le programme de clignotement LED le plus simple, beaucoup de code inutile est inclus. C'est le prix pour la facilité de développement et le seuil d'entrée bas. Cependant, en parlant de cela, je suis rusé: l'exemple montré dans le dernier article ne correspond pas à ce qui est obtenu après assemblage dans l'IDE Arduino.
2. Coupez la graisse du firmware
Dans Arduino, le noyau IDE est assemblé dans une bibliothèque core.a statique distincte, qui est ensuite liée aux fichiers d'objets d'esquisse dans un binaire prêt à l'emploi. Nous ferons de même dans Qt Creator.
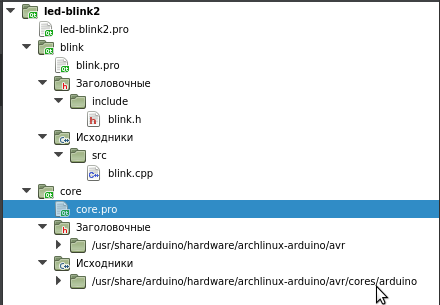
Créer un projet principal avec la structure suivante
Le script qmake pour ce projet est présenté ci-dessous:
core.pro # DESTDIR = ../../lib TARGET = core # INCLUDEPATH += $$ARDUINO_DIR/cores/arduino INCLUDEPATH += $$ARDUINO_DIR/variants/standard INCLUDEPATH += $$ARDUINO_DIR/libraries INCLUDEPATH += /usr/avr/include # C QMAKE_CC = /usr/bin/avr-gcc QMAKE_CFLAGS += -c -g -Os -w -ffunction-sections -fdata-sections QMAKE_CFLAGS += -MMD -mmcu=$$ARDUINO_MCU -DF_CPU=$$ARDUINO_FCPU QMAKE_CFLAGS += -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR ARDUINO_MCU -DF_CPU=$$ARDUINO_FCPU QMAKE_CXXFLAGS += -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR files($$ARDUINO_DIR/cores/arduino/*.h) HEADERS += $$files($$ARDUINO_DIR/variants/standard/*.h) files($$ARDUINO_DIR/cores/arduino/*.c) SOURCES += $$files($$ARDUINO_DIR/cores/arduino/*.cpp)
Le projet contient exclusivement du code Arduino Core. Son assemblage donne la sortie de la bibliothèque libcore.a
Maintenant, à côté de créer un projet de firmware contenant le code d'esquisse
blink.pro # # Arduino Core ARDUINO_DIR=/usr/share/arduino/hardware/archlinux-arduino/avr/ # (Arduino Uno, Nano, Mini) ARDUINO_MCU=atmega328p # ARDUINO_FCPU = 16000000L # , Qt ! QT -= gui core CONFIG -= qt # - , ELF TEMPLATE = app # DESTDIR = ../../bin TARGET = blink # INCLUDEPATH += $$ARDUINO_DIR/cores/arduino INCLUDEPATH += $$ARDUINO_DIR/variants/standard INCLUDEPATH += $$ARDUINO_DIR/libraries INCLUDEPATH += /usr/avr/include # C QMAKE_CC = /usr/bin/avr-gcc QMAKE_CFLAGS += -c -g -Os -w -ffunction-sections -fdata-sections QMAKE_CFLAGS += -MMD -mmcu=$$ARDUINO_MCU -DF_CPU=$$ARDUINO_FCPU QMAKE_CFLAGS += -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR ARDUINO_MCU -DF_CPU=$$ARDUINO_FCPU QMAKE_CXXFLAGS += -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR # QMAKE_LINK = /usr/bin/avr-gcc QMAKE_LFLAGS = -w -Os -Wl,ARDUINO_MCU QMAKE_LIBS = -lm # QMAKE_POST_LINK += /usr/bin/avr-objcopy -O ihex -j .text -j .data -S ${TARGET} ${TARGET}.hex LIBS += -L../../lib -lcore # INCLUDEPATH += ./include HEADERS += $$files(./include/*.h) files(./src
blink.h #ifndef LED_BLINK_H #define LED_BLINK_H #include <Arduino.h> #endif // LED_BLINK_H
blink.cpp #include "blink.h" #define LED_STAND_PIN 13 unsigned long time = 0; unsigned long DELAY = 1000000; bool on = false;
Nous collecterons les deux projets ensemble en utilisant le type de projet «sous-répertoires» disponible dans qmake
led-blink2.pro TEMPLATE = subdirs SUBDIRS += ./core SUBDIRS += ./blink
Nous assemblons le projet, l'exécutons sur la carte et regardons le journal du firmware
Journal du firmware Blink.hex avrdude: AVR device initialized and ready to accept instructions Reading |
Ici, nous prêtons attention à la quantité de mémoire occupée.
avrdude: verifying ... avrdude: 1040 bytes of flash verified
Oui, le firmware fait déjà 1040 octets contre 2838 dans le projet du dernier article. Mais encore, une esquisse similaire dans l'IDE Arduino prend 882 octets. Après avoir soigneusement étudié le journal de construction de l'environnement Arduino, nous ajoutons des clés de compilateur C aux projets blink et core
QMAKE_CFLAGS += -flto -fno-fat-lto-objects
et clés de compilateur C ++
QMAKE_CXXFLAGS += -fpermissive -flto -fno-devirtualize -fno-use-cxa-atexit
Nous reconstruisons, cousons, lançons et ...
avrdude: verifying ... avrdude: 882 bytes of flash verified
Ok, 882 octets convoités ont été atteints. Qu'est-ce qui rend cela possible?
Tout d'abord, regardons les fichiers ELF obtenus lors de l'assemblage des projets actuels et précédents, à savoir, nous ferons attention aux informations symboliques, qui donneront une idée que, à partir des fonctions et des classes du noyau Arduino, il se retrouve dans le binaire. Donnez une commande
$ avr-objdump -t led-blink
Tableau des caractères clignotant led-blink: elf32-avr SYMBOL TABLE: 00800100 ld .data 00000000 .data 00000000 ld .text 00000000 .text 00800122 ld .bss 00000000 .bss 00000000 ld .stab 00000000 .stab 00000000 ld .stabstr 00000000 .stabstr 00000000 ld .comment 00000000 .comment 00000000 ld .note.gnu.avr.deviceinfo 00000000 .note.gnu.avr.deviceinfo 00000000 ld .debug_info 00000000 .debug_info 00000000 ld .debug_abbrev 00000000 .debug_abbrev 00000000 ld .debug_line 00000000 .debug_line 00000000 ld .debug_str 00000000 .debug_str 00000000 l df *ABS* 00000000 WInterrupts.c 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 00000112 l F .text 00000002 nothing 00800100 l O .data 00000004 intFunc 00000000 l df *ABS* 00000000 HardwareSerial.cpp 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 00000000 l df *ABS* 00000000 IPAddress.cpp 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 0000078a l F .text 00000016 _GLOBAL__sub_I_IPAddress.cpp 008001c8 l O .bss 00000006 _ZL11INADDR_NONE 00000000 l df *ABS* 00000000 Tone.cpp 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 0080011c l O .data 00000001 _ZL9tone_pins 000000b8 l O .text 00000001 _ZL21tone_pin_to_timer_PGM 00000000 l df *ABS* 00000000 led-blink.cpp 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 00000000 l df *ABS* 00000000 wiring_digital.c 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 00000304 l F .text 00000052 turnOffPWM 00000000 l df *ABS* 00000000 HardwareSerial0.cpp 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 00000694 l F .text 0000005a _GLOBAL__sub_I_HardwareSerial0.cpp 00000000 l df *ABS* 00000000 _clear_bss.o 000000ea l .text 00000000 .do_clear_bss_start 000000e8 l .text 00000000 .do_clear_bss_loop 00000000 l df *ABS* 00000000 wiring.c 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 00800122 l O .bss 00000001 timer0_fract 00000000 l df *ABS* 00000000 main.cpp 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 00000000 l df *ABS* 00000000 Print.cpp 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 0000081e l F .text 0000001e _ZN5Print5writeEPKc.part.2 00000000 l df *ABS* 00000000 _udivmodsi4.o 00000ac6 l .text 00000000 __udivmodsi4_ep 00000aac l .text 00000000 __udivmodsi4_loop 00000000 l df *ABS* 00000000 _exit.o 00000af2 l .text 00000000 __stop_program 00000000 l df *ABS* 00000000 hooks.c 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 0000010e w .text 00000000 __vector_22 00800127 g O .bss 00000004 timer0_overflow_count 0000094a g F .text 0000002a _Z6noToneh 00000772 g F .text 00000018 _ZN9IPAddressC1Ehhhh 000000ae g O .text 0000000a port_to_mode_PGM 00000114 g F .text 0000004e __vector_1 0000ffa0 g *ABS* 00000000 __DATA_REGION_LENGTH__ 00800123 g O .bss 00000004 timer0_millis 00000442 g F .text 0000001c _ZN14HardwareSerial4peekEv 0000084a g F .text 00000098 _ZN5Print11printNumberEmh 000007c4 g F .text 0000005a _ZN5Print5writeEPKhj 00000068 g .text 00000000 __trampolines_start 008001cf g O .bss 00000002 timer2_pin_port 00000af4 g .text 00000000 _etext 0000042a g F .text 00000018 _ZN14HardwareSerial9availableEv 0000010e w .text 00000000 __vector_24 00000a34 g F .text 0000006c loop 000004c0 g F .text 00000042 _ZN14HardwareSerial17_tx_udr_empty_irqEv 0000010e w .text 00000000 __vector_12 000007a0 w F .text 00000002 initVariant 000006ee g F .text 00000084 _ZNK9IPAddress7printToER5Print 00000542 g F .text 0000008e _ZN14HardwareSerial5writeEh 0000010e g .text 00000000 __bad_interrupt 00000b16 g *ABS* 00000000 __data_load_end 0000010e w .text 00000000 __vector_6 008001d5 g O .bss 00000001 on 00000068 g .text 00000000 __trampolines_end 0000010e w .text 00000000 __vector_3 000003ce g F .text 0000005c digitalWrite 00000356 g F .text 00000078 pinMode 00000090 g O .text 00000014 digital_pin_to_port_PGM 0000010e w .text 00000000 __vector_23 00000af4 g *ABS* 00000000 __data_load_start 000000be g .text 00000000 __dtors_end 008001da g .bss 00000000 __bss_end 00000400 g *ABS* 00000000 __LOCK_REGION_LENGTH__ 0000010e w .text 00000000 __vector_25 0000090a g F .text 00000040 _Z12disableTimerh 0000010e w .text 00000000 __vector_11 00000486 g F .text 0000001e _ZN14HardwareSerial17availableForWriteEv 000000be w .text 00000000 __init 000008fc g F .text 0000000e _ZN5Print5printEhi 00000772 g F .text 00000018 _ZN9IPAddressC2Ehhhh 000004a4 w F .text 0000001c _Z14serialEventRunv 00000502 g F .text 00000040 _ZN14HardwareSerial5flushEv 0000010e w .text 00000000 __vector_13 0000010e w .text 00000000 __vector_17 00000634 g F .text 0000004c __vector_19 00000974 g F .text 000000b8 __vector_7 0080012b g O .bss 0000009d Serial 00800104 w O .data 00000012 _ZTV14HardwareSerial 000000e0 g .text 00000010 .hidden __do_clear_bss 0000083c g F .text 0000000e _ZN5Print5printEc 00000680 g F .text 00000014 _Z17Serial0_availablev 00810000 g .stab 00000000 __eeprom_end 0000007c g O .text 00000014 digital_pin_to_bit_mask_PGM 00800116 w O .data 00000006 _ZTV9IPAddress 00000000 g .text 00000000 __vectors 00800122 g .data 00000000 __data_end 00000000 w .text 00000000 __vector_default 0000010e w .text 00000000 __vector_5 00000400 g *ABS* 00000000 __SIGNATURE_REGION_LENGTH__ 00000ae4 g .text 0000000c .hidden __tablejump2__ 0000028e g F .text 00000076 init 000000ba g .text 00000000 __ctors_start 000000ca g .text 00000016 .hidden __do_copy_data 0080011d g O .data 00000004 DELAY 00800122 g .bss 00000000 __bss_start 000007a2 g F .text 00000022 main 0000010e w .text 00000000 __vector_4 008001d6 g O .bss 00000004 time 00000244 g F .text 0000004a micros 008001ce g O .bss 00000001 timer2_pin_mask 00000000 w *ABS* 00000000 __heap_end 0000010e w .text 00000000 __vector_9 00000162 g F .text 0000004e __vector_2 00000400 g *ABS* 00000000 __USER_SIGNATURE_REGION_LENGTH__ 0000010e w .text 00000000 __vector_21 0000010e w .text 00000000 __vector_15 000000a4 g O .text 0000000a port_to_output_PGM 000008e2 g F .text 0000001a _ZN5Print5printEmi 00000a2c g F .text 00000008 setup 008001da g .stab 00000000 __heap_start 000000be g .text 00000000 __dtors_start 000000be g .text 00000000 __ctors_end 000008ff w *ABS* 00000000 __stack 00800122 g .data 00000000 _edata 008001da g .stab 00000000 _end 0000010e w .text 00000000 __vector_8 00000068 g O .text 00000014 digital_pin_to_timer_PGM 00000af0 w .text 00000000 .hidden exit 0000045e g F .text 00000028 _ZN14HardwareSerial4readEv 00000aa0 g .text 00000044 .hidden __udivmodsi4 00010000 g *ABS* 00000000 __EEPROM_REGION_LENGTH__ 00000af0 g .text 00000000 .hidden _exit 0000010e w .text 00000000 __vector_14 0000010e w .text 00000000 __vector_10 008001d1 g O .bss 00000004 timer2_toggle_count 000001b0 g F .text 00000094 __vector_16 00800100 g .data 00000000 __data_start 000005d0 g F .text 00000064 __vector_18 00000400 g *ABS* 00000000 __FUSE_REGION_LENGTH__ 00020000 g *ABS* 00000000 __TEXT_REGION_LENGTH__ 0000010e w .text 00000000 __vector_20 000000f0 g .text 00000016 .hidden __do_global_ctors
Comparez maintenant avec le deuxième projet
Tableau des caractères clignotants blink: elf32-avr SYMBOL TABLE: 00800100 ld .data 00000000 .data 00000000 ld .text 00000000 .text 00800100 ld .bss 00000000 .bss 00000000 ld .comment 00000000 .comment 00000000 ld .note.gnu.avr.deviceinfo 00000000 .note.gnu.avr.deviceinfo 00000000 ld .debug_info 00000000 .debug_info 00000000 ld .debug_abbrev 00000000 .debug_abbrev 00000000 ld .debug_line 00000000 .debug_line 00000000 ld .debug_str 00000000 .debug_str 00000000 l df *ABS* 00000000 0000003e l *ABS* 00000000 __SP_H__ 0000003d l *ABS* 00000000 __SP_L__ 0000003f l *ABS* 00000000 __SREG__ 00000000 l *ABS* 00000000 __tmp_reg__ 00000001 l *ABS* 00000000 __zero_reg__ 000000e0 l F .text 00000038 pinMode.constprop.1 000000a4 l O .text 00000014 digital_pin_to_bit_mask_PGM 00000090 l O .text 00000014 digital_pin_to_port_PGM 00000086 l O .text 0000000a port_to_mode_PGM 0000007c l O .text 0000000a port_to_output_PGM 00000118 l F .text 00000090 digitalWrite.constprop.0 00000068 l O .text 00000014 digital_pin_to_timer_PGM 000001a8 l F .text 00000076 init 0000021e l F .text 0000004a micros 00800105 l O .bss 00000004 timer0_overflow_count 0080010a l O .bss 00000004 time 00800109 l O .bss 00000001 on 00800101 l O .bss 00000004 timer0_millis 00800100 l O .bss 00000001 timer0_fract 00000000 l df *ABS* 00000000 _clear_bss.o 000000ce l .text 00000000 .do_clear_bss_start 000000cc l .text 00000000 .do_clear_bss_loop 00000000 l df *ABS* 00000000 _exit.o 00000370 l .text 00000000 __stop_program 000000dc w .text 00000000 __vector_22 000000dc w .text 00000000 __vector_1 0000ffa0 g *ABS* 00000000 __DATA_REGION_LENGTH__ 00000068 g .text 00000000 __trampolines_start 00000372 g .text 00000000 _etext 000000dc w .text 00000000 __vector_24 000000dc w .text 00000000 __vector_12 000000dc g .text 00000000 __bad_interrupt 00000372 g *ABS* 00000000 __data_load_end 000000dc w .text 00000000 __vector_6 00000068 g .text 00000000 __trampolines_end 000000dc w .text 00000000 __vector_3 000000dc w .text 00000000 __vector_23 00000372 g *ABS* 00000000 __data_load_start 000000b8 g .text 00000000 __dtors_end 0080010e g .bss 00000000 __bss_end 00000400 g *ABS* 00000000 __LOCK_REGION_LENGTH__ 000000dc w .text 00000000 __vector_25 000000dc w .text 00000000 __vector_11 000000b8 w .text 00000000 __init 000000dc w .text 00000000 __vector_13 000000dc w .text 00000000 __vector_17 000000dc w .text 00000000 __vector_19 000000dc w .text 00000000 __vector_7 000000c4 g .text 00000010 .hidden __do_clear_bss 00810000 g .comment 00000000 __eeprom_end 00000000 g .text 00000000 __vectors 00000000 w .text 00000000 __vector_default 000000dc w .text 00000000 __vector_5 00000400 g *ABS* 00000000 __SIGNATURE_REGION_LENGTH__ 000000b8 g .text 00000000 __ctors_start 00800100 g .bss 00000000 __bss_start 000002fc g F .text 00000072 main 000000dc w .text 00000000 __vector_4 00000000 w *ABS* 00000000 __heap_end 000000dc w .text 00000000 __vector_9 000000dc w .text 00000000 __vector_2 00000400 g *ABS* 00000000 __USER_SIGNATURE_REGION_LENGTH__ 000000dc w .text 00000000 __vector_21 000000dc w .text 00000000 __vector_15 000000b8 g .text 00000000 __dtors_start 000000b8 g .text 00000000 __ctors_end 000008ff w *ABS* 00000000 __stack 00800100 g .data 00000000 _edata 0080010e g .comment 00000000 _end 000000dc w .text 00000000 __vector_8 0000036e w .text 00000000 .hidden exit 00010000 g *ABS* 00000000 __EEPROM_REGION_LENGTH__ 0000036e g .text 00000000 .hidden _exit 000000dc w .text 00000000 __vector_14 000000dc w .text 00000000 __vector_10 00000268 g F .text 00000094 __vector_16 000000dc w .text 00000000 __vector_18 00000400 g *ABS* 00000000 __FUSE_REGION_LENGTH__ 00020000 g *ABS* 00000000 __TEXT_REGION_LENGTH__ 000000dc w .text 00000000 __vector_20
La différence est évidente. On peut voir que lors de la compilation du noyau dans une bibliothèque distincte, le compilateur inclut uniquement les parties du noyau qui y sont réellement utilisées dans le firmware. En particulier, dans aucun des cas, nous n'utilisons UART, cependant, dans le premier firmware, il existe des classes pour travailler avec. La réduction du volume du firmware avec les clés du compilateur doit être discutée séparément, ainsi que les clés elles-mêmes
3. Clés du compilateur et de l'éditeur de liens
Options du compilateur:
- -flto - Active l'optimisation de la mise en page. Les fonctions des fichiers d'objets liés sont liées comme si elles se trouvaient dans la même unité de traduction
- -fno-fat-lto-objects - ne crée pas de fichiers objets "fat" contenant un langage intermédiaire, à l'exception du code objet. Il agit en conjonction avec la clé précédente.
- -fpermissive - réduit le niveau de certaines erreurs du compilateur au niveau des avertissements. Peut conduire à une génération de code incorrecte
- -fuse-cxa-aexit - utilise la fonction __cxa-atexit () au lieu de atexit () dans les destructeurs d'objets
- -ffunction-sections, -fdata-sections - placez chaque fonction et données dans des sections distinctes, pour une optimisation lors de la mise en page suivante. Permet à l'éditeur de liens d'inclure uniquement les fonctions réelles dans le fichier de sortie.
- -fno-threadsafe-statics - n'utilisez pas de méthodes thread-safe pour travailler avec des membres de classe statiques. Cela a du sens car les contrôleurs AVR ont un seul thread d'exécution
- -fno-exceptions - n'utilise pas la gestion des exceptions
- -fno-devirtualize - n'utilisez pas la "virtualisation". Si le compilateur connaît le type de l'objet, il peut appeler directement ses méthodes virtuelles, sans utiliser de table de fonctions virtuelles. Cette option désactive ce mécanisme.
- -MMD - génération de règles d'assemblage distinctes pour chaque unité de traduction, avec création d'une liste de dépendances pour celle-ci dans le fichier * .d (chaque fichier * .c / *. Cpp correspond à un fichier du même nom et l'extension * .d contenant les chemins de dépendance)
- -DARDUINO_AVR_UNO, -DARDUINO_ARCH_AVR - crée pendant le prétraitement des définitions de macro ARDUINO_AVR_UNO et ARDUINO_ARCH_AVR, activant les directions nécessaires pour la compilation conditionnelle des sources.
Options de l'éditeur de liens:
- -w - désactiver tous les avertissements
- -Os - optimiser pour la taille du fichier final
- -Wl, - gc-sections - active la disposition sélective des fonctions. Seules les fonctions utilisées sont incluses dans le fichier final
- -mmcu - modèle de contrôleur utilisé
Comme vous pouvez le voir, tous les paramètres sont réduits à la désactivation des lotions utilisées dans la programmation d'applications et à l'augmentation de la sécurité du code, ainsi qu'à la réduction de la quantité de micrologiciel final.
Conclusions
J'espère que ce texte met tous les points sur le "i". La plate-forme Arduino n'a rien de surnaturel. Son architecture vise à cacher à un développeur novice tous les mécanismes, dont l'utilisation est assez courante pour ceux qui utilisent du C pur ou de l'assembleur pour développer un logiciel pour AVR.
De plus, les travailleurs Arduino basés sur Linux peuvent travailler avec commodité: cet article et les articles précédents, au meilleur de l'éloquence et de la compétence de leur auteur, mettent en évidence la question de l'utilisation d'un IDE pratique lors du développement d'un IDE normal.
J'espère que ces informations vous seront utiles. Dans le prochain article, nous parlerons probablement des capacités de débogage des projets AVR dans Qt Creator
PS: Le code source de l'exemple de projet de l'article
peut être pris ici