 Une des options pour les muscles artificiels est visible en haut de la photo (deux tubes). Ils soulèvent un pneu de voiture pesant 22 kg. Photo: Massachusetts Institute of Technology
Une des options pour les muscles artificiels est visible en haut de la photo (deux tubes). Ils soulèvent un pneu de voiture pesant 22 kg. Photo: Massachusetts Institute of TechnologyLes «muscles» artificiels prétendent être des entraînements sûrs et puissants pour de nombreux appareils différents: des machines conventionnelles à l'électronique implantable et à la robotique. Mais souvent, la conception et la production de ces «muscles» sont trop complexes et coûteuses, ce qui limite leur utilisation. Un groupe de scientifiques du Massachusetts Institute of Technology et de l'Université Harvard ont développé une
conception de lecteur biocompatible
extrêmement simple coûtant
moins d'un dollar , tout en étant suffisamment puissante pour un appareil aussi primitif.
Les disques peuvent être fabriqués à partir de différents matériaux et de différentes tailles en utilisant un design publié dans un style origami. Ils travaillent dans l'air, sous l'eau, dans le vide.
Le concept de base du nouvel appareil comprend uniquement un cadre compressible, une coque extérieure («peau») et un matériau de remplissage, qui peut être n'importe quel matériau fluide, comme l'air ou l'eau.
Des expériences ont montré que ces entraînements peuvent comprimer jusqu'à 10% de leur longueur maximale, ils peuvent supporter des charges allant jusqu'à 600 kPa et la puissance spécifique maximale dépasse 2 kilowatts par kilogramme. Cela correspond à peu près ou même dépasse la puissance spécifique des muscles humains.
 Conception, processus de fabrication et entraînements multi-échelles résultants
Conception, processus de fabrication et entraînements multi-échelles résultantsLe travail des muscles artificiels, ainsi que le processus bon marché de leur production est illustré dans l'illustration ci-dessus.
Légende(A) Entraînements linéaires miniatures utilisant des structures origami en zigzag en polyétheréthercétone (PEEK) comme cadres et un film PVC comme «peau». En raison de l'utilisation de matériaux biocompatibles, ces entraînements conviennent à une utilisation dans les implants médicaux et l'électronique portable. (B) Un grand lecteur puissant monté sur un cadre en zigzag fait de plaques d'impression en nylon. La «peau» est en nylon enduit de polyuréthane thermoplastique. Une roue de voiture pesant 22 kg monte à une hauteur de 20 cm en 30 secondes (
vidéo ). (C) Le principe de fonctionnement de l'entraînement. La contraction musculaire se produit principalement en raison de la force de tension de la «peau». Cette force est créée par la différence de pression entre le fluide interne et externe. L'élimination du fluide de l'actionneur augmente temporairement la pression interne. (D) Processus de production. Un variateur standard peut être rapidement produit en trois étapes simples: créer un châssis en utilisant une variété de méthodes de production; préparation de la "peau"; scellement d'une couche étanche étanche.
 Entraînements linéaires en zigzag fabriqués par différentes méthodes à partir de différents matériaux
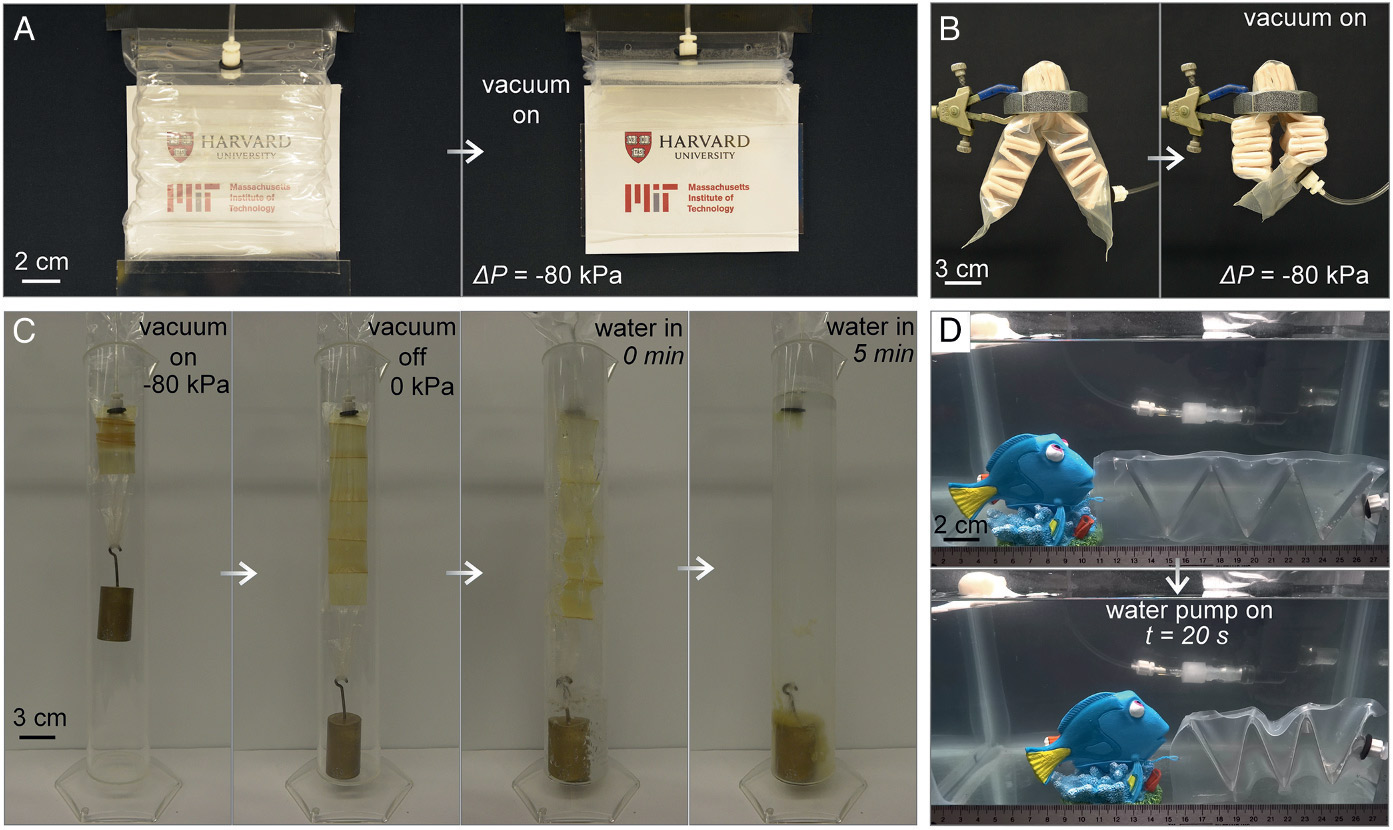
Entraînements linéaires en zigzag fabriqués par différentes méthodes à partir de différents matériauxLa partie A montre un lecteur transparent mince qui soulève une plaque acrylique. Ici, le cadre est constitué d'une feuille de polyester transparente de 0,254 mm d'épaisseur par découpe laser et pliage manuel. Cuir: Film PVC transparent (vinyle) de 0,102 mm d'épaisseur. Matière fluide: air.
Dans la figure B, un entraînement linéaire doux fonctionne bien même lorsqu'il est verrouillé dans un écrou métallique. Structure et cuir: caoutchouc silicone et polyuréthane thermoplastique 0,24 mm. Matière fluide: air.
Sur la figure C, un entraînement soluble sous vide se dissout dans l'eau chaude à une température d'environ 70 ° C en cinq minutes. La monture et le cuir sont en acétate de polyvinyle. Matière fluide: air.
Enfin, la dernière illustration montre qu'un entraînement avec de l'eau au lieu de l'air comme matériau fluide sur un cadre en acier fonctionne avec succès sous l'eau, en particulier, il déplace un poisson de 3,5 cm.
«Les actionneurs comme les muscles artificiels sont l'une des tâches les plus importantes en général en ingénierie», explique Ph.D. Rob Wood, l'un des quatre auteurs des travaux scientifiques. «Nous avons maintenant créé des entraînements avec des caractéristiques similaires à de vrais muscles, vous pouvez donc imaginer la fabrication de presque tous les robots pour presque toutes les tâches.»
L'article scientifique a été
publié le 27 novembre 2017 dans la revue
Proceedings of the National Academy of Sciences (doi: 10.1073 / pnas.1713450114,
pdf ).