Présentation
Dans notre université, le complexe éducatif et de laboratoire "Virtual Railway" a été créé, et non pour les dix premières années. Le complexe comprend non seulement des simulateurs de matériel roulant, mais aussi des simulateurs de lieux de travail pour les répartiteurs de train, les préposés de gare, les répartiteurs d'énergie, des simulateurs d'équipement pour diagnostiquer la structure supérieure de la voie. En parlant spécifiquement des simulateurs de matériel roulant, je note que les spécificités de leur développement sont quelque peu différentes du concept de simulateur pour le conducteur. Une université ferroviaire ne forme pas de conducteurs de train, nos diplômés sont des ingénieurs ferroviaires. Par conséquent, la tâche du simulateur d'une locomotive ou d'un train électrique n'est pas seulement de familiariser l'étudiant avec le dispositif de la cabine, les commandes, les techniques et les règles de contrôle du matériel roulant. Le simulateur de matériel roulant est également un simulateur qui reproduit en temps réel le fonctionnement des systèmes de matériel roulant. Lors de leur conception, l'accent est mis sur les processus qui se produisent exactement dans l'équipement de la machine dans les différents modes de fonctionnement, sur la manière dont l'impact sur les commandes se reflète dans ces processus.
Plus récemment, notre équipe a achevé le développement du simulateur de train ES1 «Swallow». Il sera discuté plus loin
1. La partie logicielle et la structure globale du complexe de formation
Que signifie créer un complexe de formation ferroviaire? Cela signifie développer un système matériel et logiciel qui comprend
- Simulation du lieu de travail du conducteur - un panneau de commande avec tous les organes et moyens d'affichage des informations;
- Un complexe informatique qui simule en temps réel la dynamique du train, le fonctionnement de ses systèmes: circuits de puissance, traction, équipement de freinage;
- Un dispositif d'interfaçage des commandes, des moyens d'affichage des informations sur la télécommande et, si nécessaire, un équipement de train réel inclus dans le simulateur avec un modèle informatique.
- Système de visualisation pour une vue depuis la cabine depuis le poste de travail du conducteur
- Sous-système de gestion de la formation avec la capacité de présenter et d'analyser visuellement les données sur le fonctionnement des systèmes ferroviaires
En conséquence, tout cela a abouti à un système dont la structure est représentée sur la figure.
Schéma fonctionnel d'un complexe d'entraînement pour trains électriques ES1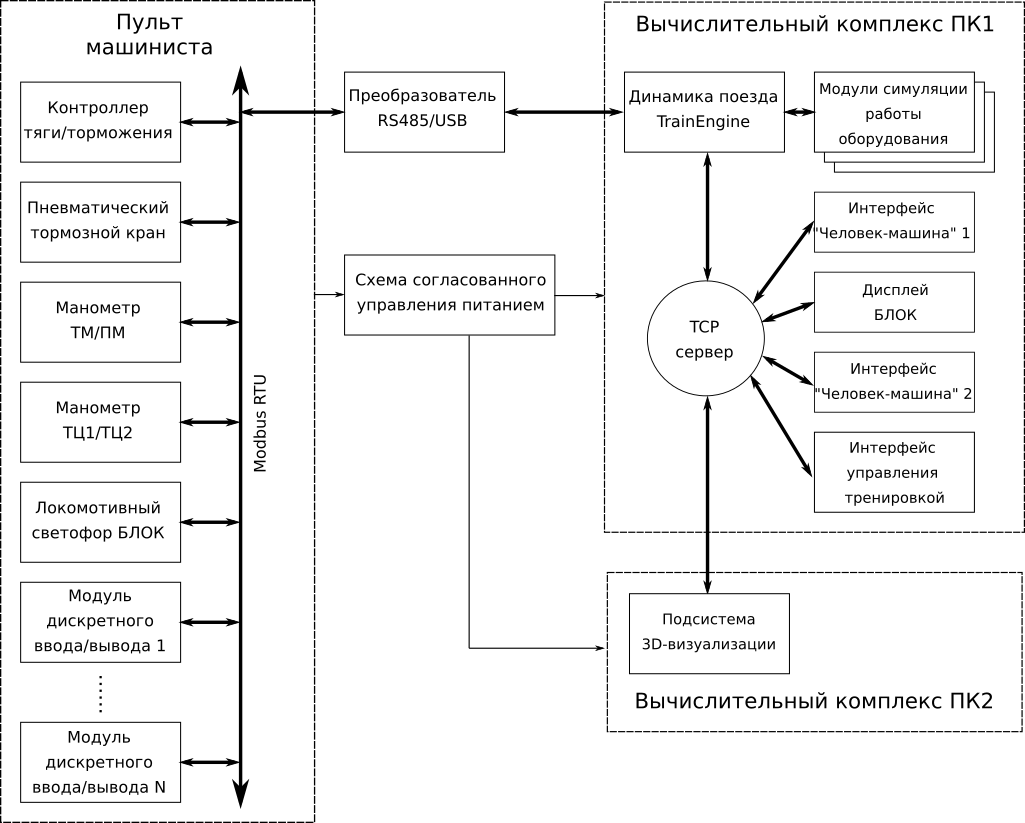
Le complexe informatique du simulateur se compose de deux ordinateurs (PC1 et PC2) connectés au réseau local via un routeur domestique (TPLink 842 nd rev3, rien d'extraordinaire) avec la possibilité d'accéder à distance au système via Wi-Fi.
Un système d'exploitation basé sur GNU / Linux a été choisi comme plate-forme système pour les deux machines. Les raisons sont les suivantes:
- Licence gratuite;
- La possibilité de personnaliser en profondeur la composition du logiciel système;
- Orientation du système vers des solutions embarquées;
- Le noyau prend en charge tous les périphériques nécessaires «prêts à l'emploi».
Malgré le fait que les PC domestiques soient utilisés en général, les logiciels d'application dans un tel système devraient amener l'utilisateur à un tel niveau de perception où il ne réalisera même pas qu'il y a une sorte de système d'exploitation à l'intérieur. Pas de clavier! Pas de souris! A bas le bureau! Il est venu, a tourné l'interrupteur d'alimentation, n'a pas attendu longtemps et a préparé un système pour le travail. Ici, vous pouvez discuter pendant très longtemps, mais Linux, dans le sens de la simplicité de la mise en œuvre d'une telle approche, dépasse de loin les autres systèmes d'exploitation. Parmi la variété variée des distributions, notre choix s'est limité à Arch Linux pour les raisons suivantes:
- La possibilité d'une personnalisation approfondie au stade du déploiement du système;
- Rolling-release, ce qui signifie de nouvelles versions de packages;
- Des packages binaires, contrairement au même Gentoo, ce qui signifie un déploiement et une maintenance à grande vitesse du système.
PK1 est le principal, il exécute un modèle informatique du train, représenté structurellement par le moteur de dynamique du moteur TrainEngine, qui simule le mouvement de la partie mécanique du train et des modules qui mettent en œuvre des modèles mathématiques d'équipements non liés à la mécanique. Ces modules, avec le module serveur TCP et la bibliothèque Modbus RTU, forment un module exécutable unique du cœur de calcul.
TrainEngine implémente le modèle de train dit généralisé. Tout train, qu’il s’agisse d’un train électrique à grande vitesse ou d’un train de marchandises, est mécaniquement un système d’organes connectés dont le mouvement est limité par la configuration de la structure supérieure de la voie. Les paires de roues de certains corps sont des moments appliqués fournis par le sous-système de traction et les freins. Ainsi, pour tout simulateur, la fonctionnalité sera la même. Par conséquent, toute la mécanique du mouvement du train est effectuée dans des bibliothèques configurables distinctes. La différence entre les types de matériel roulant est mise en œuvre au niveau des modèles logiciels du reste de l'équipement.
L'interface d'interaction du conducteur avec une locomotive / train électrique moderne est désormais saturée de modules d'affichage. En fait, de nombreux moyens d'affichage d'informations, qui étaient auparavant mis en œuvre par des dispositifs de pointage, ont été réduits à un ensemble d'écrans d'ordinateur sur lesquels des informations actuelles sont affichées. Il existe quatre écrans de ce type sur le même «Swallow»: deux interfaces homme-machine multifonctionnelles, un affichage d'un complexe de locomotives sûres (BLOCK) et un affichage du système de vidéosurveillance.
Interface homme-machine d'un véritable train électrique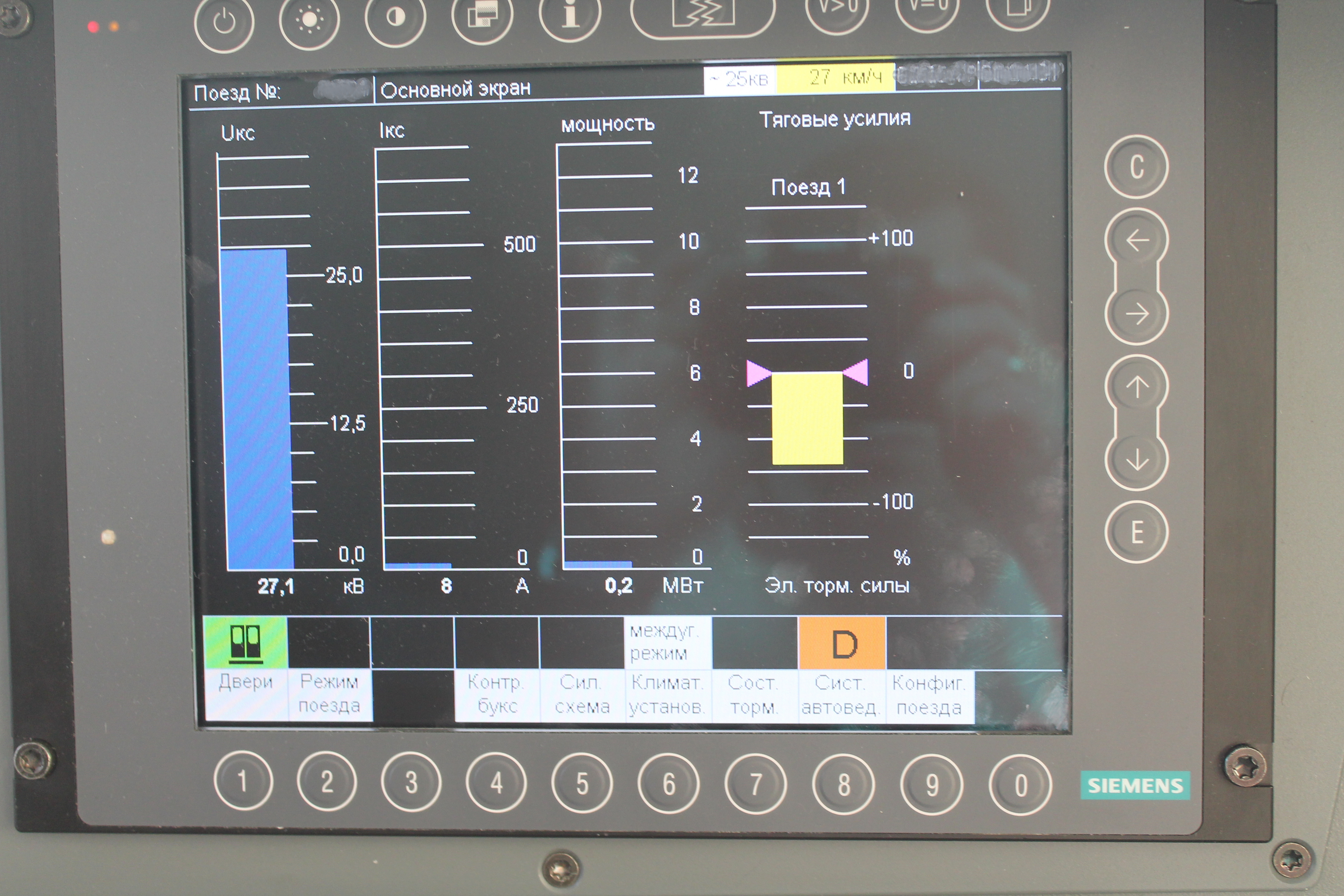 Affichage du complexe de locomotive sécuritaire (BLOC)
Affichage du complexe de locomotive sécuritaire (BLOC) Intérieur de la cabine et disposition de l'affichage sur un véritable train électrique
Intérieur de la cabine et disposition de l'affichage sur un véritable train électrique
Sur un véritable train électrique, chaque module d'affichage est un ordinateur industriel distinct qui communique avec le système de contrôle à l'aide de protocoles MVB / WTB spécifiques. Ces modules exécutent Windows XP Embedded (oui, imaginez!).
Dans notre cas, un tel gaspilleur est inutile - quatre écrans tactiles d'Elo, connectés au PC1 via le port d'affichage et des câbles USB pour l'interface tactile. Les modules d'affichage sont implémentés comme des processus séparés communiquant avec le cœur de calcul via des sockets TCP. Le paramètre Xorg permet à chaque fenêtre de vivre exclusivement dans son moniteur prévu. Les boutons matériels sur le cadre d'affichage sont simulés par le logiciel.
Il a été possible de reproduire les fonctionnalités de base de ces dispositifs relatives aux systèmes de trains électriques responsables de la traction et du freinage. Les applications sont écrites en C ++ en utilisant le framework Qt5. En général, Qt5 imprègne tous les logiciels, compte tenu de sa grande adaptabilité à la fois à la création d'interfaces utilisateur et à la disponibilité de bibliothèques pour travailler avec les protocoles TCP / IP et Modbus RTU. De plus, la célèbre technologie du signal-slot s'est avérée absolument indispensable pour organiser l'interaction des classes à tous les niveaux.
Interface homme-machine du simulateur Afficher le simulateur de BLOC
Afficher le simulateur de BLOC
En raison des spécificités de notre simulateur, l'affichage du système de vidéosurveillance n'était pas nécessaire; à la place, l'écran restant a été utilisé pour nos besoins pour contrôler le lancement de la formation, configurer et gérer la puissance des ordinateurs.
Interface de démarrage d'entraînement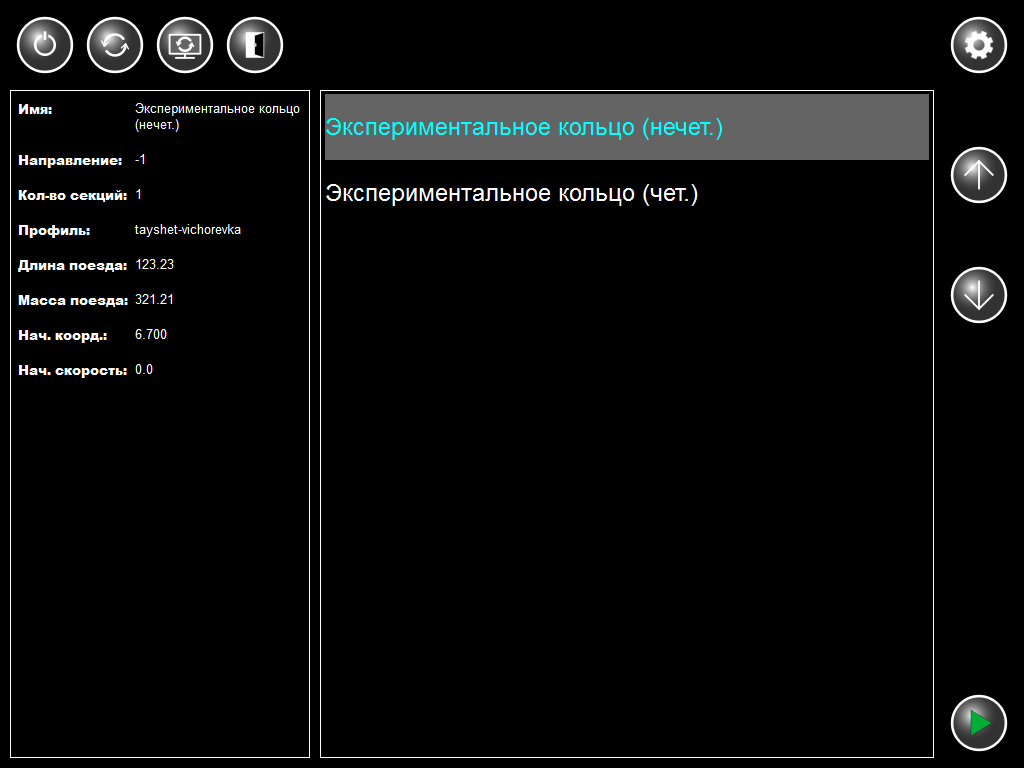
2. Matériel - contrôles et interface distribuée
L'opération la plus difficile et la plus coûteuse consiste à équiper le simulateur de commandes authentiques du vrai cockpit. Sur le point d'acheter des pièces de fer originales ne va pas pour deux raisons. Le premier est le coût énorme des composants d'origine, justifiés par leur utilisation sur du matériel roulant réel et fabriqués selon les exigences pertinentes. La seconde - l'interfaçage avec un ordinateur est compliquée par le fait que sur un matériel roulant réel des protocoles fermés pour l'interaction des équipements et des systèmes de contrôle sont utilisés. La seule issue pour nous était de concevoir et de fabriquer indépendamment des éléments tels qu'un contrôleur de traction / freinage, une valve de freinage et des manomètres pour le système de freinage d'un train électrique.
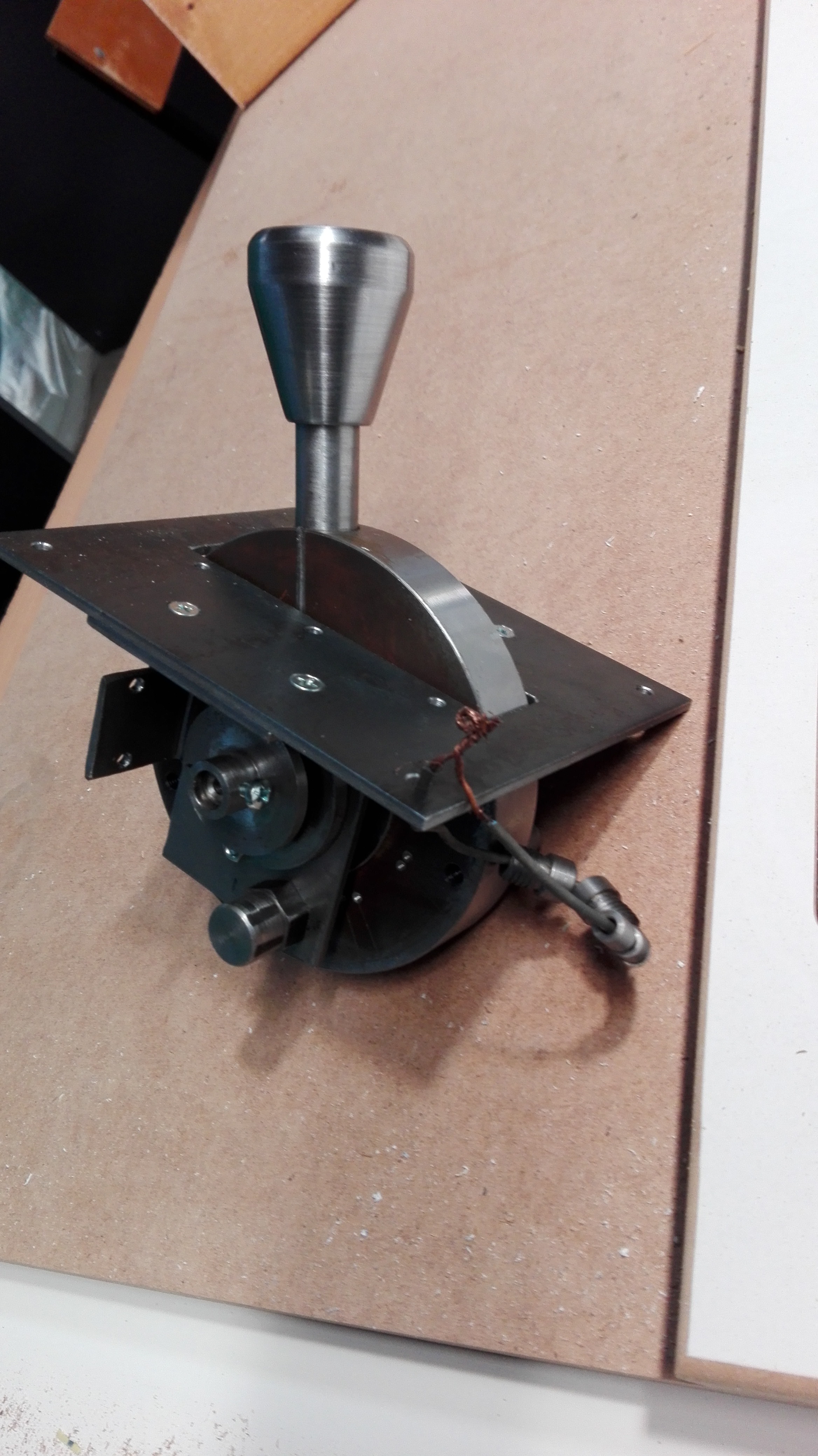
Pour être clair, il s'agit principalement de ce levier
Véritable contrôleur de traction / freinage dans la cabine du train électrique
Il a été possible de mesurer ses dimensions extérieures, ce qui dépasse au-dessus du panneau, sous les sourires sceptiques de la brigade de locomotives "Swallows" avec un haltère. Nous avons conçu les intérieurs comme cela nous a semblé pratique en termes d'agencement de l'unité dans la future console et d'installation de transducteurs de mesure dessus. Le résultat est un concept unifié pour les deux "joysticks"
Le concept d'un contrôleur unifié pour le simulateur
Pneumatiquement, la valve de freinage ne diffère du contrôleur de traction que par la position initiale de la poignée à «zéro» et la présence d'une doublure décorative en plastique. Le reste des contrôleurs s'est avéré être unifié par des pièces, des capteurs et des cartes électroniques.
Des codeurs incrémentaux ont été utilisés comme capteurs de position, un capteur optique de position zéro a été utilisé pour définir le zéro dans le programme de contrôle. Le firmware de la partie électronique de l'appareil interroge l'éco-encodeur et l'optocoupleur et donne la position de la poignée en pourcentage de la force de traction / freinage et un certain nombre de signes logiques: position zéro, appui sur le capuchon de la poignée, mode de freinage d'urgence.
Sous le spoiler se trouve une autre série de photos expliquant en termes généraux la conception de ces appareils.
Une brève histoire du développement sous forme de photosMécanique en métal brut non peint, fraîchement sortie d'usine
 Kit de contrôleur de traction peint
Kit de contrôleur de traction peint Contrôlez la mécanique immédiatement après le revêtement en poudre. Nous essayons sur les encodeurs
Contrôlez la mécanique immédiatement après le revêtement en poudre. Nous essayons sur les encodeurs Sujet de test
Sujet de test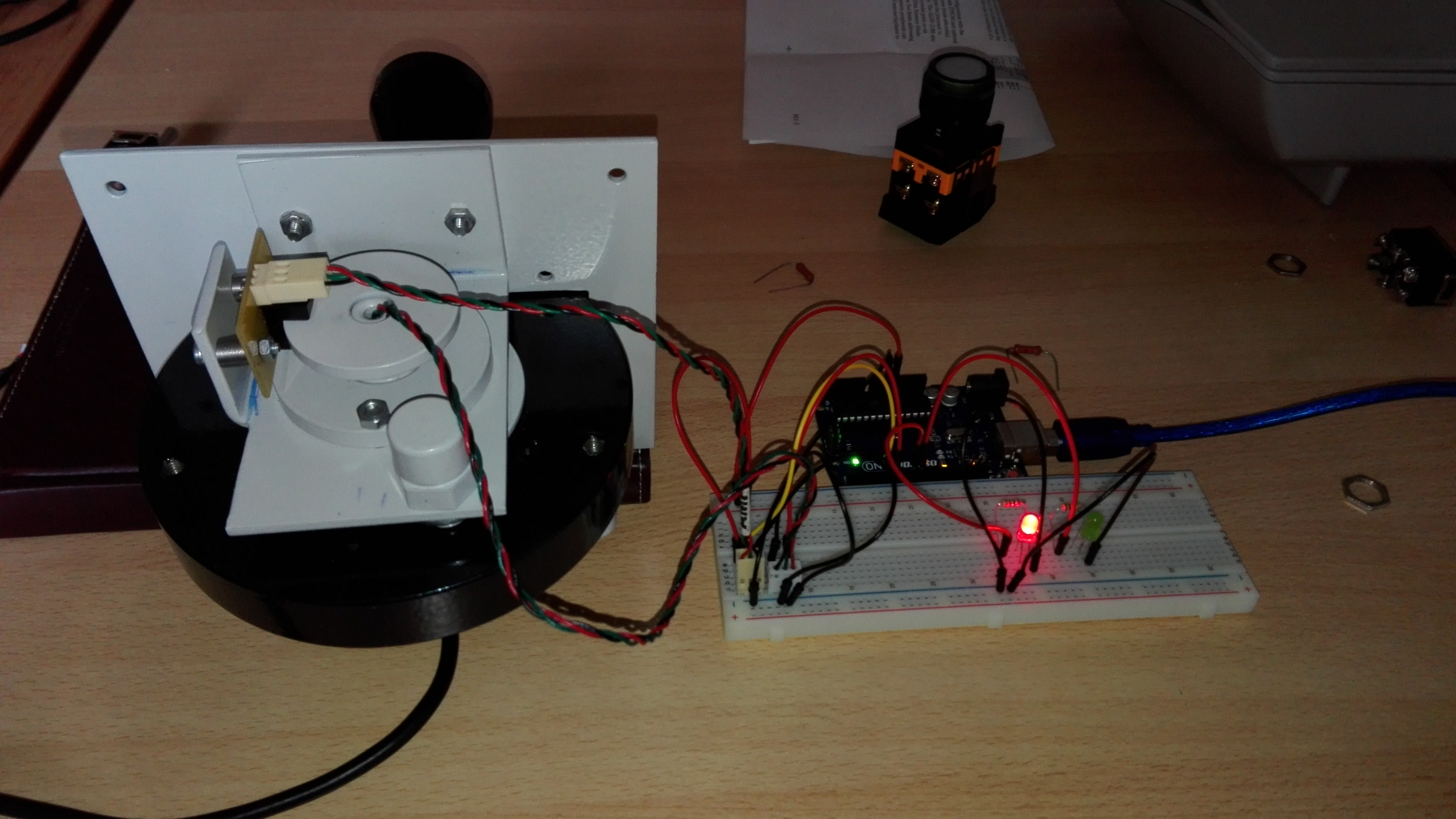 La valve pneumatique du conducteur après l'installation d'une superposition décorative imprimée sur une imprimante 3D
La valve pneumatique du conducteur après l'installation d'une superposition décorative imprimée sur une imprimante 3D Assemblage de contrôleur de traction débogué avec cerveaux
Assemblage de contrôleur de traction débogué avec cerveaux Contrôleur de traction monté sur un panneau standard. Le module d'E / S TOR adjacent est visible.
Contrôleur de traction monté sur un panneau standard. Le module d'E / S TOR adjacent est visible.

Les manomètres sont devenus une autre pierre d'achoppement, ces
Vérifier les jauges du système pneumatique du train électrique
Même si nous en avons régulièrement - ces appareils sont pneumatiques, connectés aux canalisations du système de freinage. Ce qu'il fallait, c'était un appareil qui affichait des pressions provenant d'un modèle informatique. De plus, ressemblant à l'original. De plus, incapable de faire des engrenages, j'ai dû me débrouiller et trouver un mécanisme sans engrenage qui vous permet de faire tourner les deux flèches indépendamment
Objectif des inventions de rusePartie exécutive des manomètres électromécaniques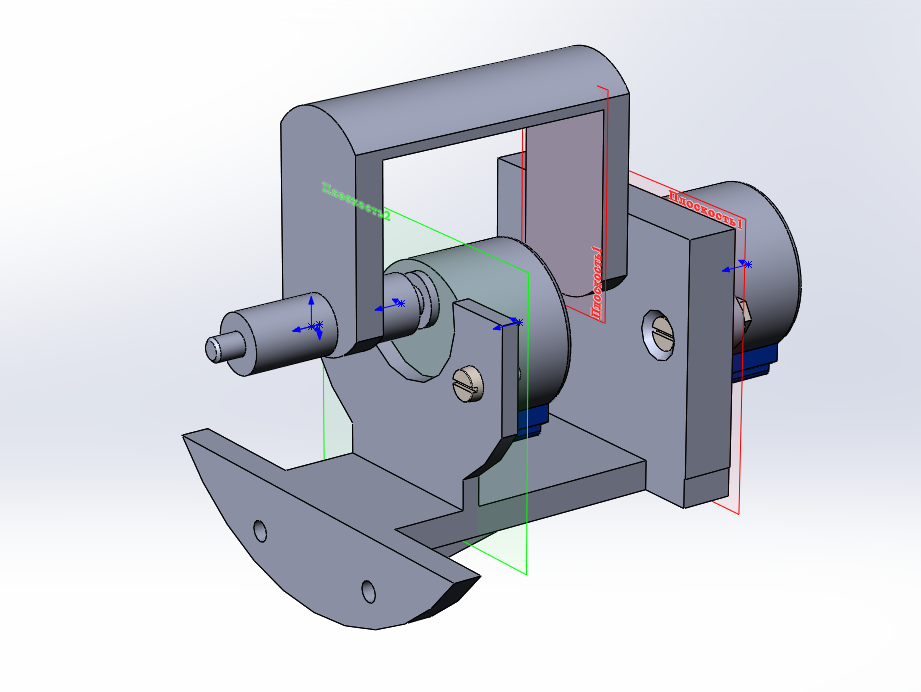
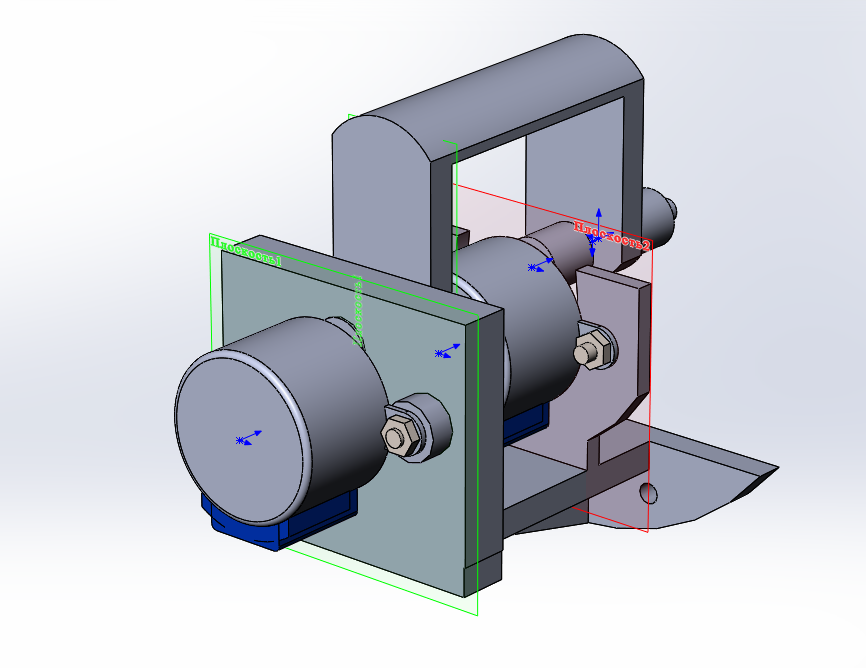
En conséquence, après quelques mois de délibération, de développement, de fabrication et de débogage, un tel assemblage est sorti

Plus de photos du manomètreUn ensemble de pièces réalisées sur une imprimante 3D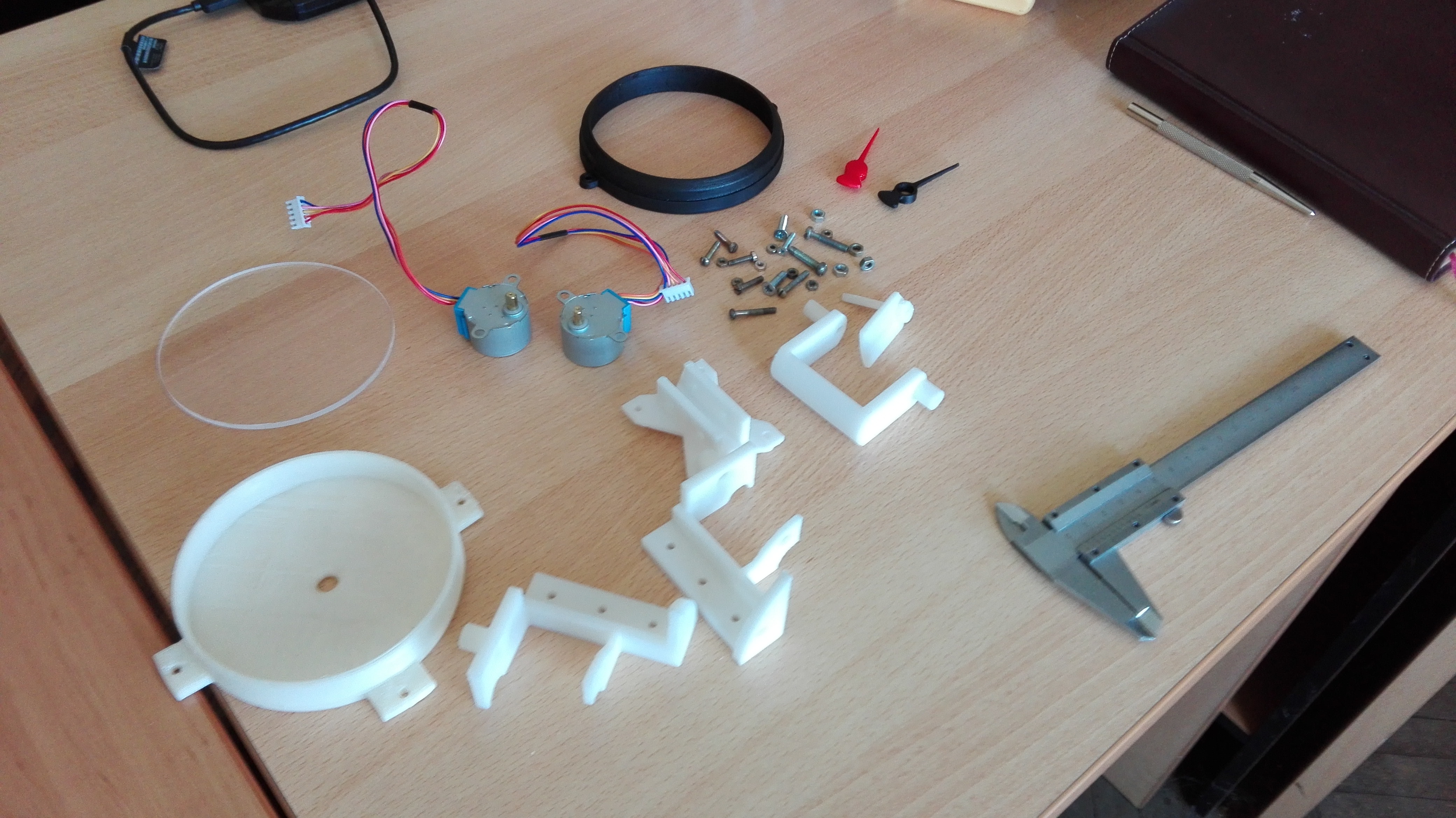 Débogage lors de l'écriture du firmware
Débogage lors de l'écriture du firmware
Il n'y a eu aucun problème avec d'autres commandes - le reste n'est que des boutons et des commutateurs. Cependant, leur nombre est suffisant pour réfléchir à la façon d'entrer tous ces signaux dans l'ordinateur.
Nous avons décidé de sortir des sentiers battus à l'échelle industrielle - RS485 est notre tout. Les faisceaux courts des boutons et des lampes de contrôle vont aux cartes d'E / S discrètes, et à partir de là, leur état est entré dans la machine via deux câbles à paire torsadée.
Panneau dans la zone J de la vue de dessus de la console du conducteur ... vue de dessous de l'installation. Cartes d'E / S visibles
... vue de dessous de l'installation. Cartes d'E / S visibles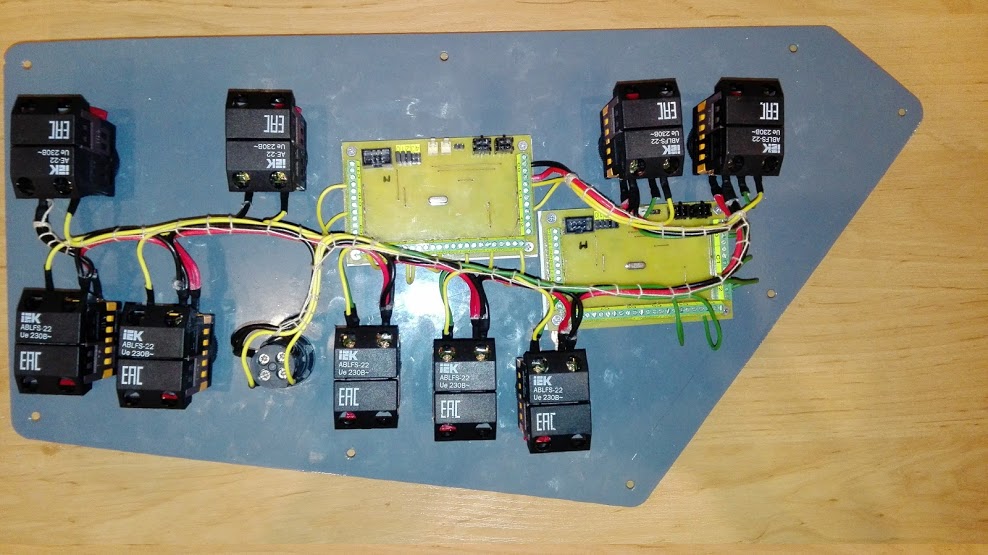
Modbus RTU a été choisi comme protocole d'échange de données en raison de sa simplicité, de son ouverture et de sa prévalence dans les domaines liés à l'automatisation industrielle. Les cartes d'entrées / sorties discrètes sont universelles et sont installées sur le panneau de commande à distance à l'endroit où elles sont nécessaires. Pour des dispositifs tels que des contrôleurs et des manomètres, ainsi qu'un feu de circulation pour locomotives, des solutions distinctes ont été appliquées en raison des spécificités de leur travail.
Le résultat est un réseau de 12 abonnés. Le signal est entré dans le complexe informatique via l'adaptateur RS485 / USB. Le logiciel a utilisé une implémentation prête à l'emploi de Modbus RTU à partir du cadre Qt5.
Abats de la console avant l'assemblage final du simulateur
Quelques photos de plusLe premier lancement de modules d'affichage sur écrans standard Débogage en plein essor
Débogage en plein essor Compartiment électrique
Compartiment électrique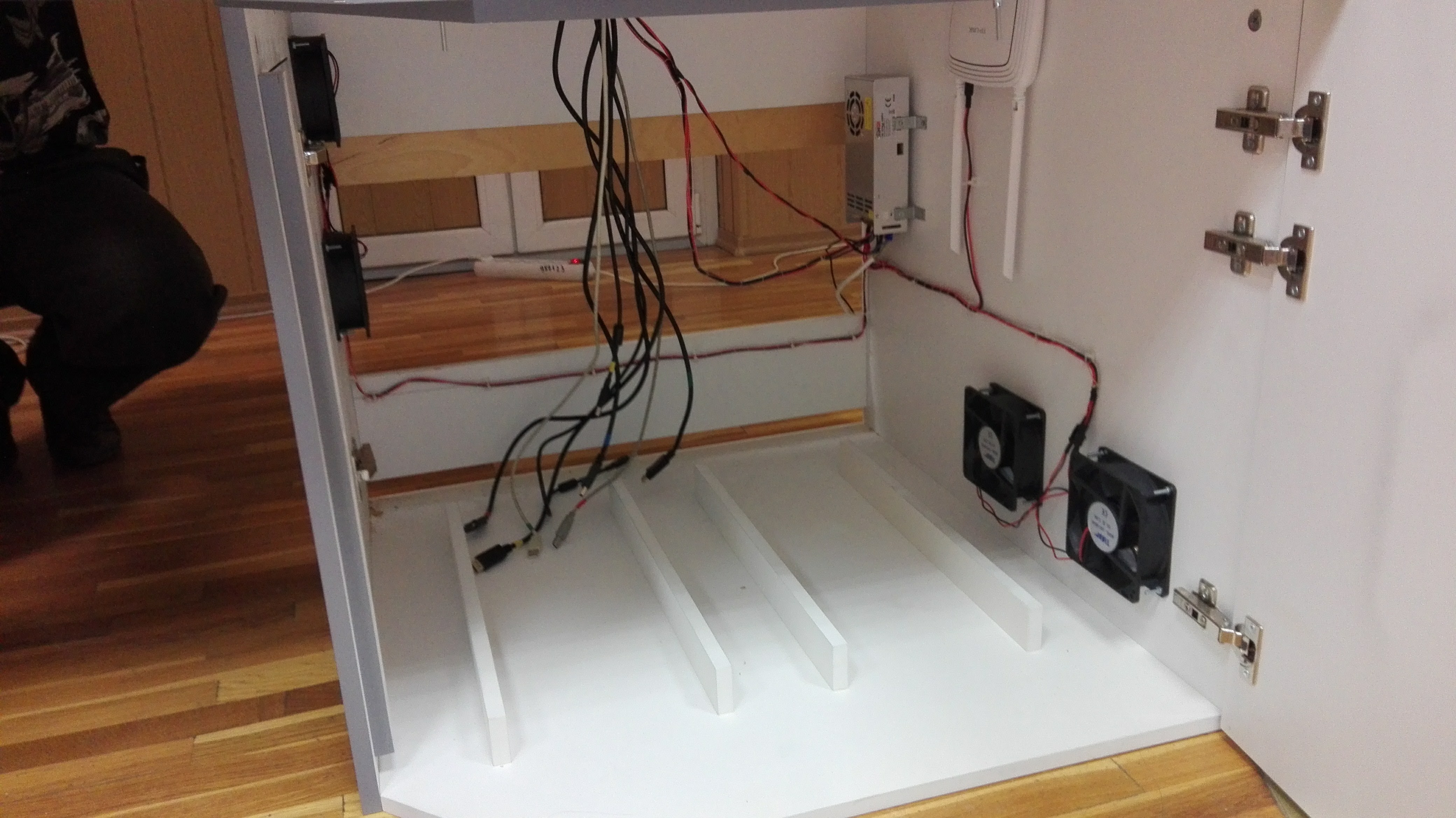 L'une des étapes de l'assemblage final
L'une des étapes de l'assemblage final Il est assemblé et débogué. Prêt pour l'installation en cabine
Il est assemblé et débogué. Prêt pour l'installation en cabine
En général, il s'est avéré assez fiable, et surtout pratique pour l'expansion ultérieure des fonctions. Tous les composants électroniques du système sont sous le contrôle vigilant du système de diagnostic du programme. Les messages d'échec sont émis aussi lisibles que possible, en vue d'une détection précoce d'un bloc indésirable
Écran de diagnostic avec un journal de la session en cours du simulateur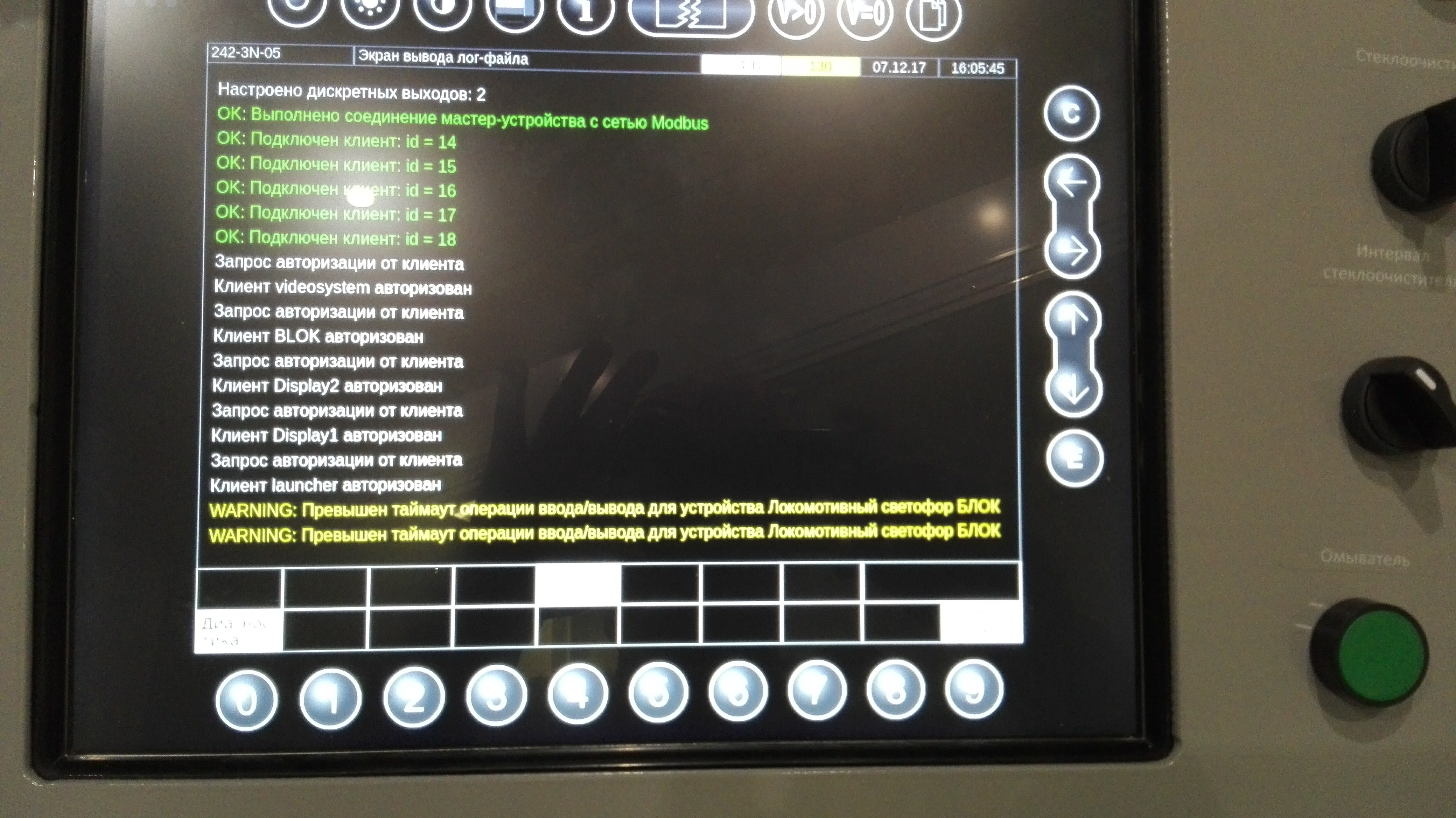
3. Sous-système de visualisation tridimensionnelle
Avec tout le pouvoir de créer l'effet de présence, cette partie du système est la moins fonctionnelle. Il n'y a pas de «physique» à l'intérieur, toute la «physique» est côté serveur. Le client graphique est déplacé vers un ordinateur PC2 distinct. Du serveur, il reçoit la soi-disant coordonnée ferroviaire - se déplaçant le long du chemin en kilomètres, la traduit en coordonnées tridimensionnelles de la caméra et montre la vue depuis la cabine vers le paysage environnant. Sur PC2, le NVidia GTX 1060 habituel est installé. Le système vidéo est écrit en Unity Personal.
Système vidéo en cours de débogage
Ici, nous avons encore beaucoup de travail à faire pour trouver la meilleure architecture, et nous y travaillons constamment. Il y a suffisamment de nuances pour que l'histoire à leur sujet fasse l'objet d'un article séparé.
Conclusion
Actuellement, le simulateur est en cours d'essai et de test dans le processus éducatif dans le laboratoire de transport à grande vitesse de notre université. J'espère avoir une histoire intéressante, je remercie les lecteurs de leur attention. Je m'excuse pour le grand nombre de photos lourdes, eh bien, sans cela en aucune façon.
c) Centre pour le développement des compétences en innovation