Dans une publication précédente, j'ai donné un aperçu de l'histoire des concepteurs d'ingénierie de fischertechnik de 1965 à 2017, et maintenant, conformément aux souhaits des lecteurs, je publie un aperçu de l'ensemble de découverte 524328 ROBOTICS TXT.

Le constructeur 524328 est destiné aux garçons et aux filles qui s'intéressent à la mécanique, l'automatisation, la programmation, la vision par ordinateur ou, comme on dit maintenant, à la robotique.
La boîte en carton contient des pièces mécaniques, des moteurs, un contrôleur TXT programmable, une caméra vidéo, le logiciel ROBO Pro, des instructions de montage et un petit livre au format PDF avec du matériel pédagogique.
De plus, pour travailler avec le concepteur, nous avons besoin d'une batterie 34969, qui comprend une batterie NiMH et un chargeur.
Cependant, avant de passer à une description détaillée du kit, je vous suggère de vous familiariser avec l'histoire du premier designer fischertechnik dédié à la robotique.
Contexte
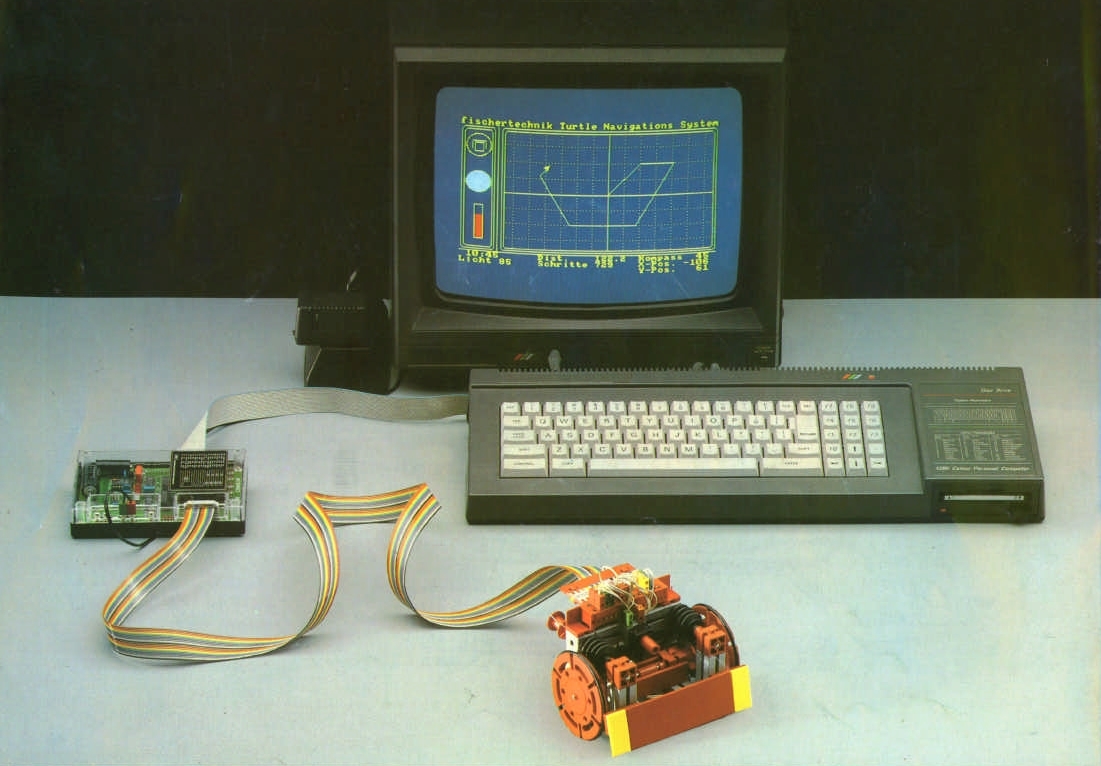
Le premier concepteur basé à Fischertechnik dédié à la robotique mobile est apparu en 1983 dans le cadre d'un projet éducatif expérimental mené à l'époque au Royaume-Uni.
La société Economatics, travaillant sur le projet, a attiré l'attention sur le travail d'un jeune scientifique du MIT Seymour Peypert (1928-2016), qui, prédisant l'ampleur de la révolution imminente dans le domaine de la technologie informatique, a suggéré de commencer à initier les enfants aux ordinateurs dès le plus jeune âge en utilisant la formation développée par son équipe. Logo du langage de programmation.
Une caractéristique importante de Logo était l'interface conviviale de l'environnement d'exécution et la présence dans cet environnement d'un objet de contrôle virtuel - une «tortue» graphique qui, conformément aux commandes du programme compilé, pouvait se déplacer sur l'écran de l'ordinateur, laissant une trace. Soit dit en passant, ce travail de M. Peypert a été transformé à plusieurs reprises et a survécu à ce jour sous la forme d'un environnement de programmation d'apprentissage appelé Scratch (nous en parlerons plus tard).
Ainsi, dans la solution qui a été proposée en conséquence, il a été proposé de remplacer la tortue virtuelle par un objet très réel - un chariot mobile. Ainsi, les étudiants ont l'opportunité non seulement de se familiariser avec les technologies de programmation, mais aussi d'apprendre les bases de la robotique. Ainsi, le premier ensemble de buggy BBC est apparu:
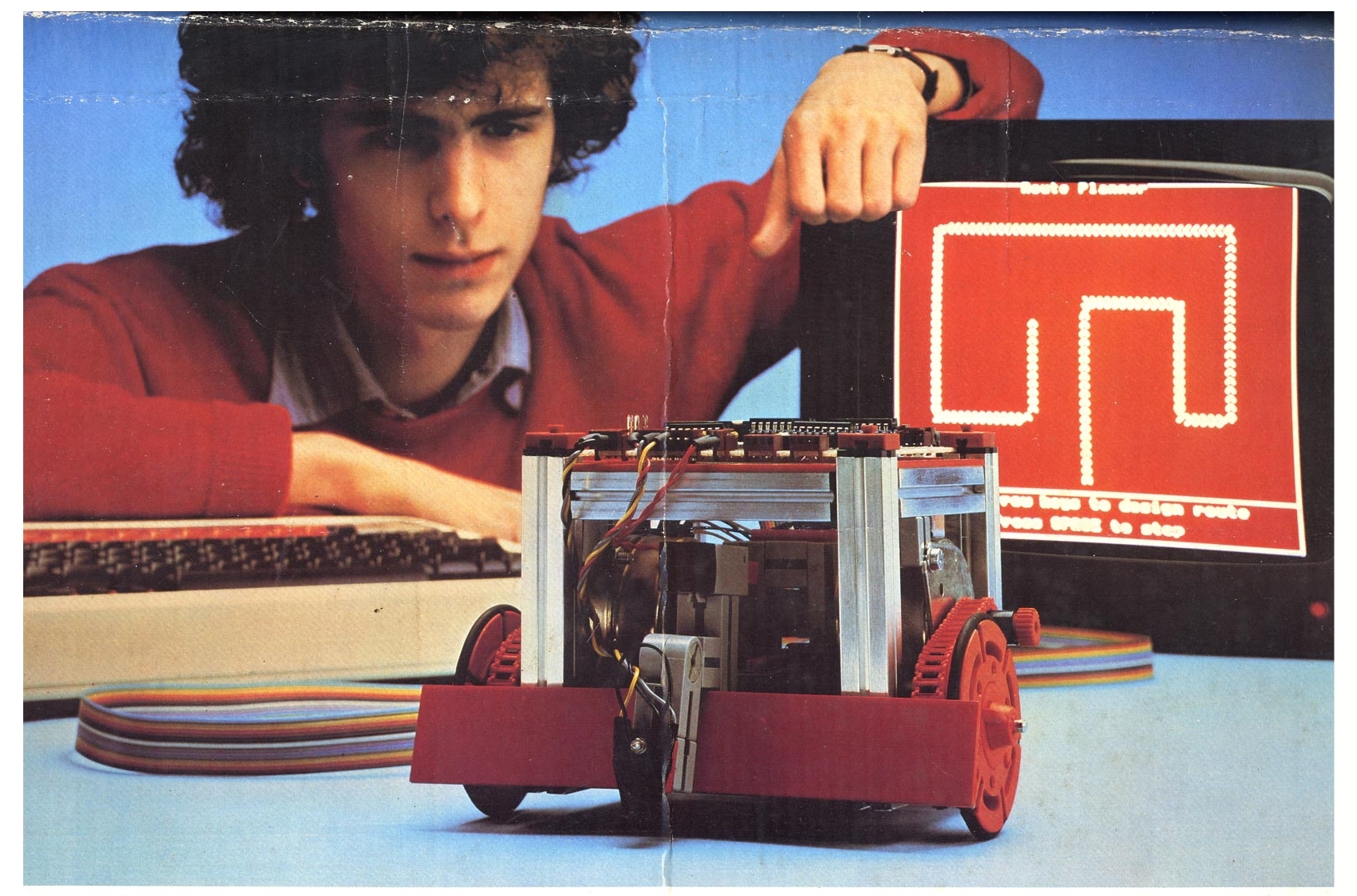
Le kit comprenait des pièces fischertechnik pour l'assemblage du chariot, une carte de contrôle, un support avec des exemples de programmes de contrôle et des instructions avec des tâches de formation. La carte de commande était connectée à l'ordinateur à l'aide d'un câble plat. On peut dire que c'était un projet commun fischertechnik + Economatics.
Fischertechnik a lancé le premier kit expérimental de robot entièrement propriétaire en 1987 - le 39502 Computing-Experimental. À partir de l'ensemble, il a été possible de construire plusieurs variantes de machines automatiques et de vous essayer à la programmation d'algorithmes de contrôle
Cela a été suivi par la prochaine génération de concepteurs et d'ensembles supplémentaires pour l'expansion fonctionnelle, mais c'est une histoire qui nécessite un article séparé. Aujourd'hui, je suggère d'examiner de plus près l'ensemble actuel - 524328 ROBOTICS TXT Discovery set
524328 ROBOTICS TXT Discovery set
Designer 524328 se compose de 310 pièces, à partir desquelles 14 modèles d'expériences peuvent être construits. En plus des instructions de montage et d'un CD avec le logiciel ROBO Pro, la boîte contient également des blancs pour assembler un terrain d'essai pour tester des robots mobiles. Traditionnellement, l'ensemble est accompagné d'un mini-livre au format PDF, à partir duquel vous pouvez obtenir des informations de base dans le domaine de la robotique.
Apparence de l'emballage:

À l'intérieur de la boîte en carton, les pièces sont stockées dans deux loges en plastique dans des compartiments séparés. Si vous le souhaitez, vous pouvez également acheter un système de stockage propriétaire et utiliser des substrats pour trier les pièces facilement coupables avec des ciseaux dans les instructions de montage.
Pour une utilisation dans des tasses et des écoles, ce concepteur est emballé dans des récipients en plastique Gratnells plus pratiques et durables et a un autre numéro de commande - 533018.

En plus des éléments structurels simples, la liste des pièces comprend deux servomoteurs avec encodeurs intégrés, un moteur à courant continu conventionnel avec une boîte de vitesses externe, un phototransistor, une thermistance, des bus, des LED et une boule orange pour des expériences avec un système de vision par ordinateur:

(en cliquant sur l'image - hirez)
Contrôleur TXT programmable
L'unité de contrôle du concepteur 524328 est réalisée sous la forme d'un ordinateur compact construit sur la base du processeur ARM Cortex A8 et d'une carte d'entrée-sortie intégrée sur l'ARM Cortex M3. Pour interagir avec l'utilisateur, l'appareil dispose d'un écran tactile couleur de 2,4 pouces, 320x240 avec rétro-éclairage. De plus, l'ordinateur dispose d'un haut-parleur intégré et d'un RTC avec alimentation de secours à partir d'une batterie au lithium.
Contrôleur TXT:

Le contrôleur TXT fonctionne sous le système d'exploitation du noyau Linux. Si vous le souhaitez, vous pouvez démarrer votre système d' exploitation à partir d'une carte mémoire micro-SD enfichable.
La mémoire
- 128 Mo de RAM DDR3
- 64 MB FLASH
- Micro sd
- Périphérique de stockage de masse USB
Les communications
Les interfaces du contrôleur ont les interfaces suivantes:
- Bluetooth 2.1 EDR + 4.0
- WLAN 802.11 b / g / n
- Mini connecteur USB pour la connexion à un ordinateur
- Connecteur USB-A avec fonction de contrôleur hôte pour connecter un appareil photo USB, un lecteur flash USB et d'autres appareils.
- Photodétecteur IR pour la télécommande du kit «Kit de télécommande»
- Interface I2C
- Interface UART
- Interface CAN
Entrée-sortie
- Entrées universelles: 8 pièces numériques / analogiques 0-9V ou 0-5 kOhm
- Entrées de comptage: 4 pièces (0-9V Fin <1 kHz)
- Sorties universelles (PWM 9V / 0,25A): 8 pièces
Juste au cas où, les intérieurs du contrôleur TXT peuvent être vus dans l'image ci-dessous:
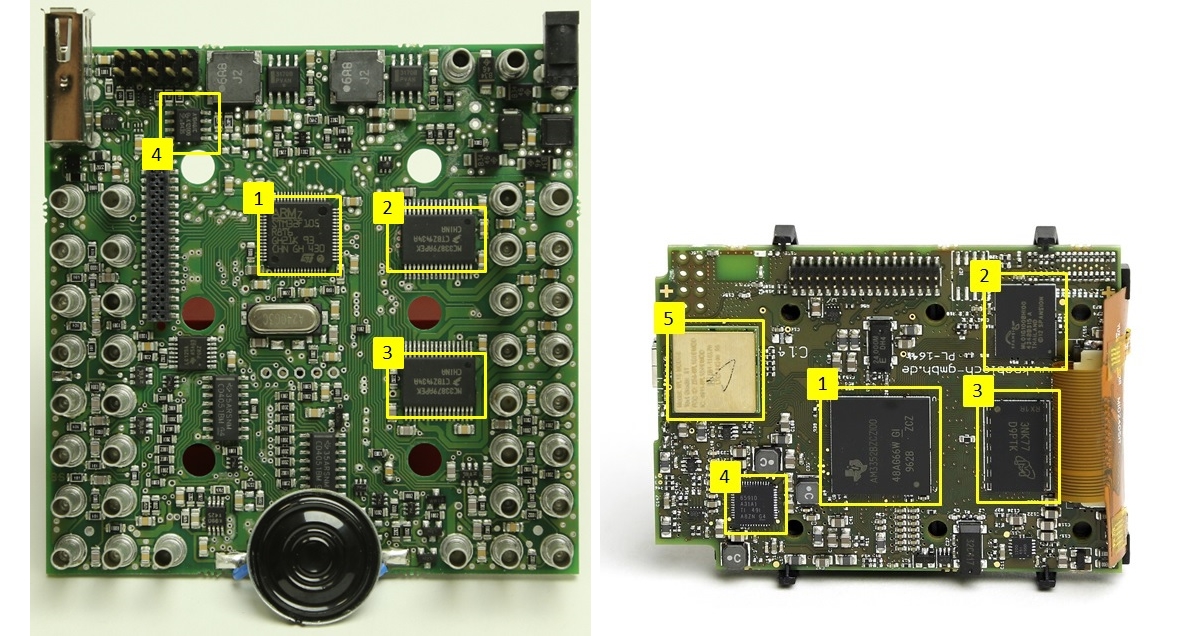
Sur le circuit imprimé de gauche:
- ST STM32F105R8T6 - Microcontrôleur ARM Cortex-M3.
- MC33879 - pilote de sortie.
- MC33879 - pilote de sortie.
- TJA1040 - Pilote série de bus CAN.
Sur le circuit imprimé de droite:
- TI AM3352B - Microcontrôleur ARM Cortex-A8.
- Spansion ML01G100 - SLC NAND FLASH 64MB.
- Samsung K4B2G - DDR3L 1600 DRAM 128 Mo
- TPS65910 - module de gestion de l'alimentation.
- WL18MODGB (5) combo module WiFi + Bluetooth.
Une caractéristique importante de ce kit est la disponibilité du matériel et des logiciels pour les expériences de vision par ordinateur. Pour cela, le kit dispose d'une caméra vidéo avec une interface USB, et le logiciel de l'outil ROBO Pro dispose d'une bibliothèque de fonctions de vision par ordinateur et d'un configurateur pour la configuration et la mise en service.

La bibliothèque de vision par ordinateur contient les fonctions de base suivantes pour le traitement des images vidéo:
- Calcul de la luminosité moyenne d'une région donnée d'une image vidéo.
- Recherchez une séquence d'éléments raster de la même couleur pour une région donnée d'une image vidéo.
- Recherche d'une figure géométrique, calcul de coordonnées et de tailles.
- Un détecteur de mouvement dans une région d'une image vidéo.
Le configurateur de sous-système de vision par ordinateur inclus dans le logiciel ROBO Pro:

Logiciel d'outillage ROBO Pro
Pour développer des programmes de contrôle pour le contrôleur TXT, il est proposé d'utiliser le logiciel d'outils pédagogiques ROBO Pro, qui comprend un éditeur de schémas fonctionnels d'algorithmes, une bibliothèque d'éléments de programme de base, une bibliothèque de fonctions d'application, des outils de mise en service et de télécommande. Le logiciel ROBO Pro fait partie du kit de conception. Séparément, il n'est pas nécessaire de l'acheter.
En règle générale, la fenêtre de l'éditeur ressemble à l'image ci-dessous:
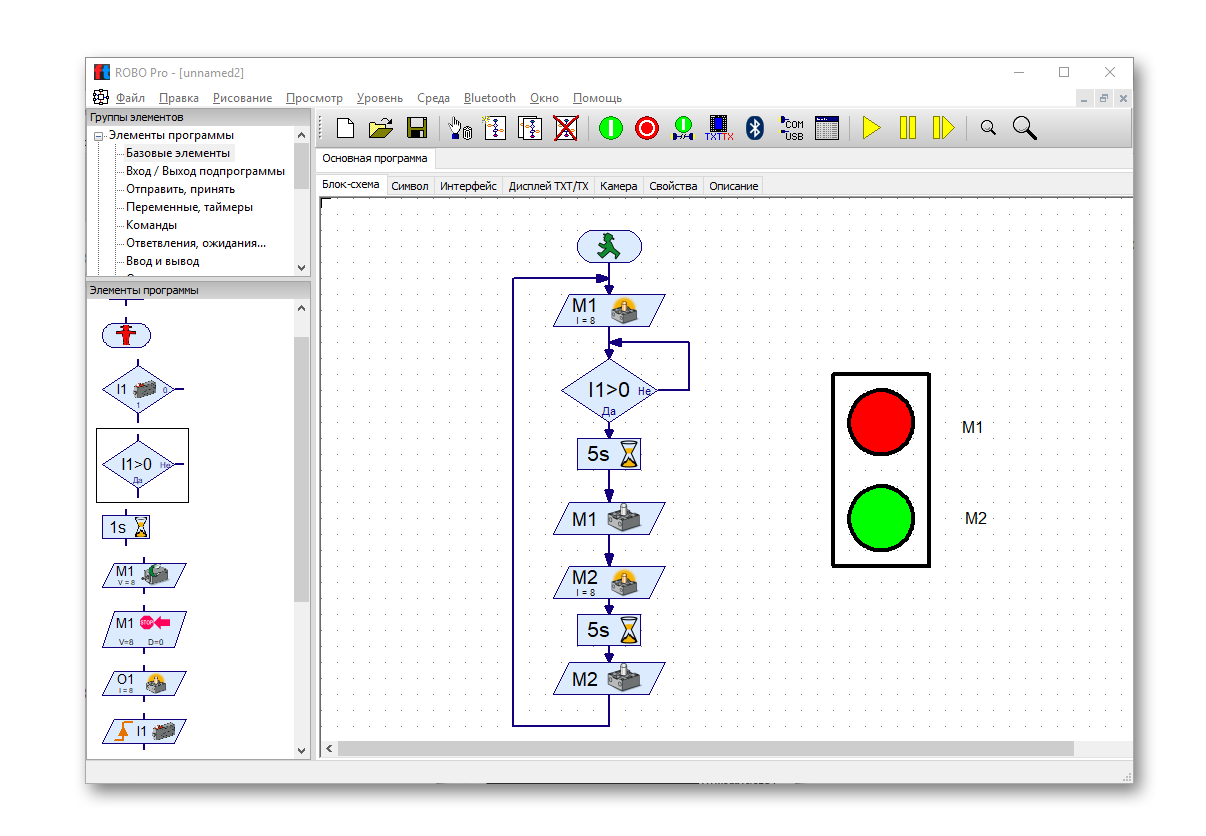
Les algorithmes de contrôle sont compilés sous la forme d'organigrammes classiques classiques - comme c'est la coutume dans la littérature informatique spécialisée et la documentation technique. Bien sûr, vous pouvez raisonnablement me demander: - qu'en est-il de Scratch? Pourquoi est-ce dans la documentation des algorithmes MK ATMEL ou PLC SIMATIC représentés sous forme d'organigrammes, et non sous forme de circuits scratch? Ici, je peux difficilement vous répondre raisonnablement. Cependant, mon ingénieur interne est ravi de l'opportunité d'utiliser un outil visuel généralement accepté de manière naturelle pour la première connaissance d'enfants avec des technologies de contrôle automatique.
Au cas où, les algorithmes de la documentation technique :

Les organigrammes compilés dans l'éditeur peuvent être exécutés en deux modes - localement sur la machine instrumentale ou à distance en téléchargeant sur la machine cible. La première méthode est pratique pour le débogage. lors de l'exécution de l'algorithme, vous pouvez utiliser une exécution pas à pas et mettre en évidence l'étape actuelle de l'algorithme.
Pour les utilisateurs avancés, ROBO Pro prend en charge les algorithmes multithread. La décomposition des algorithmes en procédures est également prise en charge, et il existe également des éléments d'interface utilisateur qui peuvent être placés directement sur les feuilles des organigrammes.
La bibliothèque d'éléments d'interface utilisateur comprend un enregistreur / oscilloscope, des comparateurs à cadran et des champs pour l'entrée et la sortie de valeurs numériques. Il s'agit d'une fonctionnalité très importante pour les débutants et les utilisateurs avancés. La possibilité d'enregistrer des données en temps réel et d'analyses ultérieures simplifie considérablement l'étude de nouveaux algorithmes de contrôle et réduit considérablement le temps de configuration.
Voici à quoi ressemble la fenêtre de l'éditeur avec un projet plus complexe:
Ensembles supplémentaires
La fonctionnalité du kit 524328 peut être étendue avec des kits supplémentaires de la série ROBOTICS:
Ils diffèrent du constructeur 524328 en l'absence d'un contrôleur TXT. Il est supposé que la transition vers ces ensembles se produit après avoir résolu tous les problèmes de l'ensemble 524328.
Exemples de projets
J'ai préparé plusieurs vidéos qui révèlent certaines (mais en aucun cas toutes) des possibilités du constructeur standard TXT Discovery set sans détails supplémentaires. Tous les projets des exemples sont sur le github . Je me ferai un plaisir de répondre à vos questions dans les commentaires.
Deux algorithmes simples de feux de circulation:
Contrôle à distance à l'aide d'éléments d'interface utilisateur et de diffusion vidéo dans ROBO Pro:
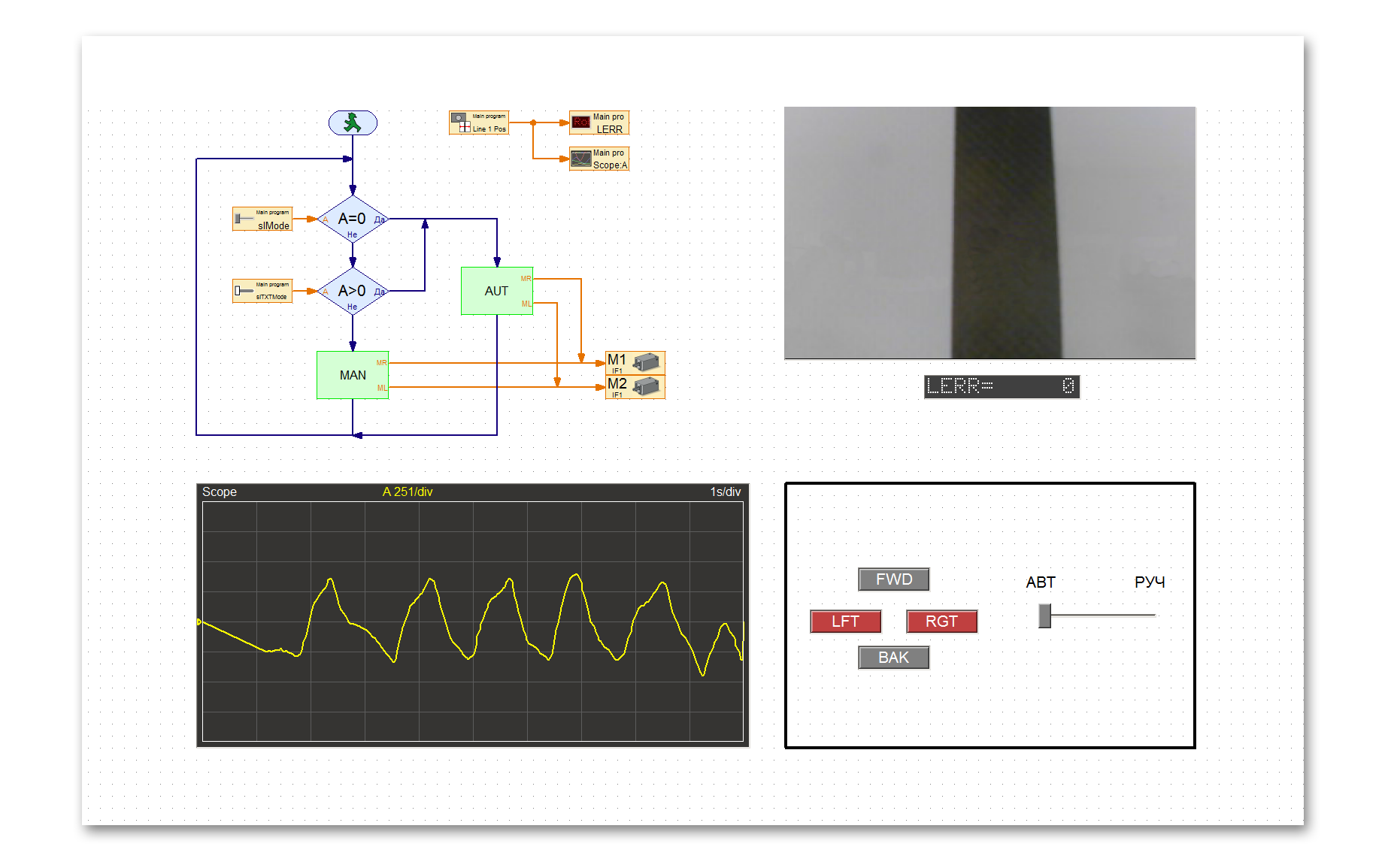
Contrôle automatique du chariot avec rétroaction basée sur la vision par ordinateur. La loi proportionnelle de régulation est utilisée. Le gain de la liaison proportionnelle KP = 3,5. On peut voir que le chariot se déplace de manière irrégulière le long de l'itinéraire - il se balance et finit par quitter la piste. Faites attention à l'enregistreur de paramètres. Il vous permet de quantifier la valeur du dépassement après l'arrêt du mouvement:
La raison du comportement instable est que lorsque le chariot tourne, des forces d'inertie surviennent qui continueront à faire tourner le chariot même si l'action de commande de la liaison proportionnelle est nulle. En conséquence, nous voyons comment le chariot glisse la ligne et commence alors à tourner dans la direction opposée - des oscillations se produisent dans le système dynamique. Ce comportement réduit considérablement la qualité du contrôle et, dans certains cas, peut entraîner une défaillance.
Pour contrer les forces d'inertie, un élément de différenciation est ajouté à la structure du contrôleur, qui forme un signal proportionnel à la variation de l'inadéquation à l'entrée du contrôleur. Réglez le coefficient KD = 6,0 et voyez comment le chariot se comporte:
Maintenant, le robot passe régulièrement la piste. Faites attention au signal vert sur l'enregistreur - c'est le signal de sortie de la liaison différentielle du régulateur, qui aide à «ralentir» le virage du robot lorsqu'il revient sur la trajectoire.
Conclusion
Ci-dessus, j'ai donné plusieurs exemples d'utilisation de l'ensemble 524328 ROBOTICS TXT Discovery pour organiser des exercices pratiques sur la théorie de la commande automatique. Les exemples donnés étaient très secs et dépourvus de calculs théoriques. Je pense que dans l'une des publications suivantes, je pourrai partager mes meilleures pratiques concernant l'organisation de cours pratiques en automatisation à l'aide de constructeurs fischertechnik. Cela vous intéresserait-il?
Comme d'habitude, pour les amateurs d'ingénierie qui maîtrisent l'intégralité du post, une remise de 15% sur le code gktms1712 jusqu'au 31/12/2017 inclus dans la boutique Pakpak . Gloire aux robots!
Les références
- L'histoire de la tortue d'entraînement de buggy BBC 1983
- Seymour Papert - inventeur du langage Logo
- Build OS personnalisé pour TXT Controller
- Scratch pour le contrôleur TXT
- Python pour contrôleur TXT