Bonjour à tous. Notre département a été chargé de présenter l'interface numérique DALI. De plus, une présentation démontrant le fonctionnement de cette interface. Si nécessaire, alors c'est nécessaire. Ce que nous n'avons tout simplement pas fait. À cet effet, deux modules de commande pour luminaires LED ont été fournis. Les deux ont été conduits. Et le maître? Nous avons commencé à choisir un contrôleur pour contrôler cette interface. En conséquence, le prix est exorbitant ou le délai de livraison est le même. Et les vacances approchent, et je n'ai pas envie de retarder. Encore une fois, nous avons examiné les caractéristiques et attiré l'attention sur les caractéristiques de ce protocole numérique:
- DALI est un protocole ouvert;
- DALI est un bus décentralisé, c'est-à-dire qu'il n'a pas de contrôleur central et permet toute topologie.
Tout cela semblait très attrayant et la tâche ne semblait absolument pas difficile. À première vue. Nous avons décidé de faire des masters DALI sur Arduino.
Un grand merci à Timur Nabiev pour sa
publication sur Habré . Veuillez lire. Je ne vais pas me répéter, il a prescrit une bonne théorie. Disposition de l'interface - cela ne se fait pas plus facilement. Mais avec la bibliothèque qu'il a publiée, quelque chose n'a pas très bien fonctionné pour nous.
Par conséquent, nous avons décidé de faire nos croquis. Ils en ont fait deux. La première consiste à attribuer des adresses courtes à tous les «membres» du réseau.
Afficher#define DALI_TX_PIN 3 #define DALI_RX_PIN A0 #define LED_PIN 13 #define RESET 0b00100000 #define INITIALISE 0xA5 #define RANDOMISE 0xA7 #define SEARCHADDRH 0xB1 #define SEARCHADDRM 0xB3 #define SEARCHADDRL 0xB5 #define PRG_SHORT_ADDR 0xB7 #define COMPARE 0xA9 #define WITHDRAW 0xAB #define TERMINATE 0xA1 #define START_SHORT_ADDR 2 #define DALI_ANALOG_LEVEL 650 #define DALI_HALF_BIT_TIME 416 //microseconds #define DALI_TWO_PACKET_DELAY 10 //miliseconds #define DALI_RESPONSE_DELAY_COUNT 15 // // uint8_t ShortAddr = START_SHORT_ADDR; void setup() { pinMode(LED_PIN, OUTPUT); digitalWrite(LED_PIN, LOW); pinMode(DALI_TX_PIN, OUTPUT); digitalWrite(DALI_TX_PIN, HIGH); Serial.begin(115200); DaliInit(); } //----------------------------------------------------- void loop() { } //----------------------------------------------------- void DaliInit() { Serial.println("Initialization..."); DaliTransmitCMD(RESET, 0x00); delay(2*DALI_TWO_PACKET_DELAY); DaliTransmitCMD(RESET, 0x00); delay(2*DALI_TWO_PACKET_DELAY); delay(100); DaliTransmitCMD(INITIALISE, 0x00); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(INITIALISE, 0x00); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(INITIALISE, 0x00); delay(DALI_TWO_PACKET_DELAY); delay(100); DaliTransmitCMD(RANDOMISE, 0x00); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(RANDOMISE, 0x00); delay(DALI_TWO_PACKET_DELAY); delay(100); while(ShortAddr < 64) { long SearchAddr = 0xFFFFFF; bool Response = 0; long LowLimit = 0; long HighLimit = 0x1000000; Response = SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); if(Response) { digitalWrite(LED_PIN, LOW); Serial.println("Device detected, address searching..."); if(!SearchAndCompare(SearchAddr - 1)) { delay(DALI_TWO_PACKET_DELAY); SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(PRG_SHORT_ADDR, ((ShortAddr << 1) | 1)); delay(3*DALI_TWO_PACKET_DELAY); DaliTransmitCMD(WITHDRAW, 0x00); Serial.print("24-bit address found: 0x"); Serial.println(SearchAddr, HEX); Serial.print("Assigning short address "); Serial.println(ShortAddr); break; } } else { Serial.println("No devices detected"); break; } while(1) { SearchAddr = (long)((LowLimit + HighLimit) / 2); Response = SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); if (Response) { digitalWrite(LED_PIN, LOW); if ((SearchAddr == 0) || (!SearchAndCompare(SearchAddr - 1))) break; HighLimit = SearchAddr; } else LowLimit = SearchAddr; } delay(DALI_TWO_PACKET_DELAY); SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(PRG_SHORT_ADDR, ((ShortAddr << 1) | 1)); delay(5*DALI_TWO_PACKET_DELAY); DaliTransmitCMD(WITHDRAW, 0x00); delay(DALI_TWO_PACKET_DELAY); Serial.print("24-bit address found: 0x"); Serial.println(SearchAddr, HEX); Serial.print("Assigning short address "); Serial.println(ShortAddr); ShortAddr++; // break; // } delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(TERMINATE, 0x00); delay(DALI_TWO_PACKET_DELAY); Serial.println("Init complete"); } //------------------------------------------------- bool SearchAndCompare(long SearchAddr) { bool Response = 0; uint8_t HighByte = SearchAddr >> 16; uint8_t MiddleByte = SearchAddr >> 8; uint8_t LowByte = SearchAddr; for(uint8_t i = 0; i < 3; i++) { DaliTransmitCMD(SEARCHADDRH, HighByte); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(SEARCHADDRM, MiddleByte); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(SEARCHADDRL, LowByte); delay(DALI_TWO_PACKET_DELAY); } DaliTransmitCMD(COMPARE, 0x00); delayMicroseconds(7 * DALI_HALF_BIT_TIME); for(uint8_t i = 0; i < DALI_RESPONSE_DELAY_COUNT; i++) { if (analogRead(DALI_RX_PIN) < DALI_ANALOG_LEVEL) { Response = 1; digitalWrite(LED_PIN, HIGH); break; } delayMicroseconds(DALI_HALF_BIT_TIME); } return Response; } //------------------------------------------------- void DaliTransmitCMD(uint8_t Part1, uint8_t Part2) { uint8_t DALI_CMD[] = { Part1, Part2 }; // digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); // for (uint8_t CmdPart = 0; CmdPart < 2; CmdPart++) { for(int i = 7; i >= 0; i--) { bool BitToSend = false; if ((DALI_CMD[CmdPart] >> i) & 1) BitToSend = true; if (BitToSend) digitalWrite(DALI_TX_PIN, LOW); else digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); if (BitToSend) digitalWrite(DALI_TX_PIN, HIGH); else digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); } } digitalWrite(DALI_TX_PIN, HIGH); }
Ou téléchargezEt ceci est un test. Nous contrôlons deux modules connectés à DALI.
Afficher #define DALI_TX_PIN 3 #define DALI_RX_PIN A0 #define BROADCAST_CMD 0b11111111 #define DOWN 0b00000010 #define UP 0b00000001 #define DALI_CHNL_COUNT 4 #define LAMP_OFF_VALUE 0 #define DALI_HALF_BIT_TIME 416 //microseconds #define DALI_TWO_PACKET_DELAY 10 //miliseconds // uint8_t AnalogPins[DALI_CHNL_COUNT] = {A1, A2, A3, A4, }; // uint8_t KeyPins[DALI_CHNL_COUNT] = {4, 5, 6, 7, }; uint8_t DALIPrevVals[DALI_CHNL_COUNT] = {0, 0, 0, 0}; uint8_t LampState[DALI_CHNL_COUNT] = {0, 0, 0, 0}; void setup() { pinMode(DALI_TX_PIN, OUTPUT); digitalWrite(DALI_TX_PIN, HIGH); for(uint8_t i = 0; i < DALI_CHNL_COUNT; i++) { pinMode(KeyPins[i], INPUT); digitalWrite(KeyPins[i], HIGH); } } void loop() { for(uint8_t PWM = 2; PWM < DALI_CHNL_COUNT; PWM++) { if (LampState[PWM] == 1) { uint16_t ADCValue = analogRead(AnalogPins[PWM]); if (ADCValue > 1016) ADCValue = 1016; ADCValue /= 4; uint8_t PWMVal = ADCValue; if (abs(DALIPrevVals[PWM] - PWMVal) >= 1) { DALIPrevVals[PWM] = PWMVal; DaliTransmitCMD(PWM << 1, PWMVal); if (LampState[PWM] == 0) LampState[PWM] = 1; delay(DALI_TWO_PACKET_DELAY); } } } for(uint8_t KEY = 0; KEY < DALI_CHNL_COUNT; KEY++) { if (digitalRead(KeyPins[KEY]) == LOW) { delay(70); if (KEY == 0) { DaliTransmitCMD(BROADCAST_CMD, UP); delay(DALI_TWO_PACKET_DELAY); break; } else if (KEY == 1) { DaliTransmitCMD(BROADCAST_CMD, DOWN); delay(DALI_TWO_PACKET_DELAY); break; } if (digitalRead(KeyPins[KEY]) == LOW) { if (LampState[KEY] == 0) { LampState[KEY] = 1; uint16_t ADCValue = analogRead(AnalogPins[KEY]); if (ADCValue > 1016) ADCValue = 1016; ADCValue /= 4; uint8_t PWMVal = ADCValue; DaliTransmitCMD(KEY << 1, PWMVal); } else { LampState[KEY] = 0; DaliTransmitCMD(KEY << 1, LAMP_OFF_VALUE); } delay(DALI_TWO_PACKET_DELAY); } delay(500); } } } //------------------------------------------------- void DaliTransmitCMD(uint8_t Part1, uint8_t Part2) { uint8_t DALI_CMD[] = { Part1, Part2 }; // digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); // for (uint8_t CmdPart = 0; CmdPart < 2; CmdPart++) { for(int i = 7; i >= 0; i--) { bool BitToSend = false; if ((DALI_CMD[CmdPart] >> i) & 1) BitToSend = true; if (BitToSend) digitalWrite(DALI_TX_PIN, LOW); else digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); if (BitToSend) digitalWrite(DALI_TX_PIN, HIGH); else digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); } } digitalWrite(DALI_TX_PIN, HIGH); }
Ou téléchargezBeaucoup de travail a été fait et je veux donc le partager avec tout le monde. Peut-être que cela facilitera le développement pour quelqu'un.
Aucune bibliothèque complète n'a été trouvée sur le réseau. Veuillez utiliser, tout fonctionne vraiment. Posez des questions, je vais essayer de tout répondre avec mes collègues. Peut-être pas tout de suite, nous partons vraiment en vacances pendant deux semaines.
Dans le reportage vidéo sur le travail effectué.
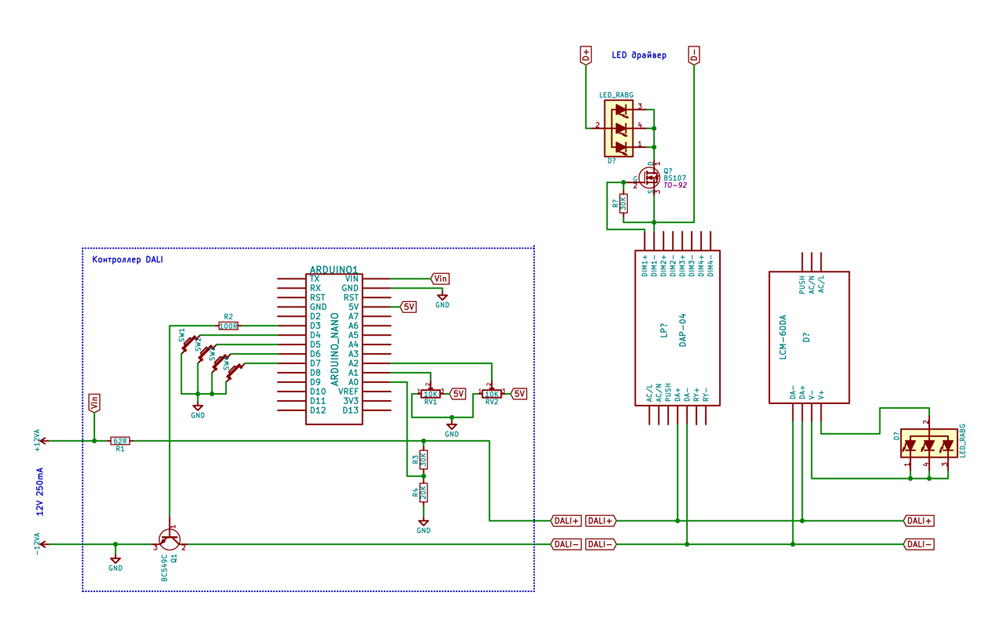
Modules DAP-04 et LCM-60DA testés de Mean Well. Mais cela fonctionnera avec tous les autres.
Et c'est le schéma du kit de corps Arduino, qui le transfère en mode maître DALI et à l'alimentation en même temps.
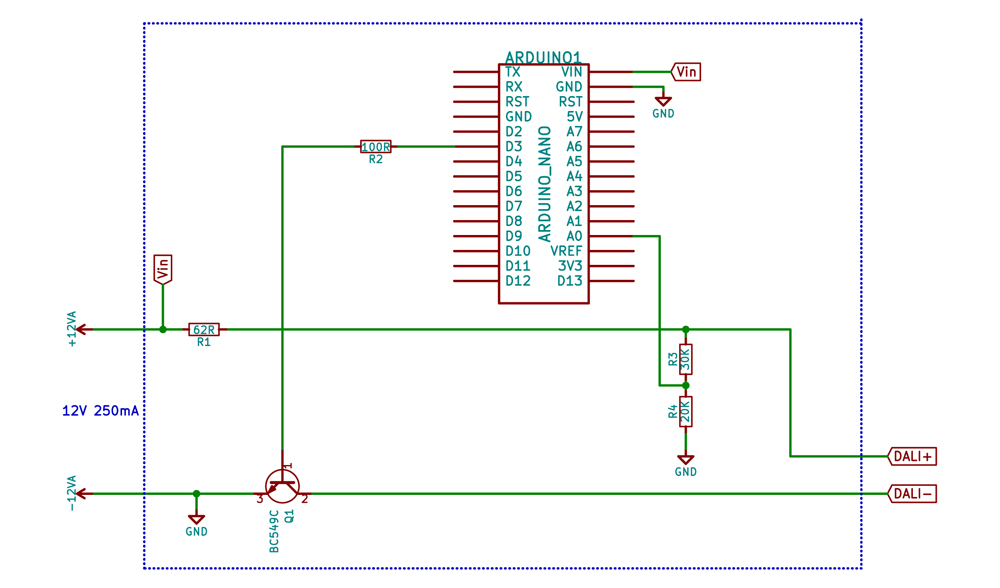
Il s'agit de la connexion des boutons pour l'esquisse de test.

Et voici un petit réseau DALI