Créé dans les années 60, Shakey a été le premier robot mobile capable d'analyser ses actions. Les objectifs ambitieux du projet n'ont pas été pleinement atteints, mais il a eu une grande influence sur le développement futur de la robotique.
Les auteurs du projet Shakey ont décrit comment le contrôle du robot était organisé dans un grand article par AI Magazine. Dans cet article - la traduction du fragment le plus intéressant et le plus important du texte. Son auteur, Peter Hart, était membre de l'équipe de développement. Création d'une touche
Le projet Shakey a été lancé en janvier 1965 à l'initiative du Center for Artificial Intelligence du Stanford Research Institute (SRI International). L'Institut a proposé le développement d'une «machine intelligente» pour les applications de renseignement. Mais le groupe de travail avait une motivation différente. Ils voulaient créer un site de test pour connecter tous les domaines de l'intelligence artificielle (représentation systémique, raisonnement, planification, apprentissage automatique, vision par ordinateur et compréhension de la parole naturelle).
Lors du développement de Shakey, les ingénieurs ont été guidés par deux règles:
- la mécanique doit être aussi simple que possible - par conséquent, aucun bras manipulateur n'a été installé sur le robot;
- afin de ne pas travailler plus tard sur la réduction de la conception, le rack électronique a été installé sur le dessus.
Étant donné que les capacités mécaniques et sensorielles de Shakey étaient limitées, l'équipe de projet a créé un environnement expérimental simple et robuste pour le robot - une demi-douzaine de pièces avec de grands blocs géométriques à l'intérieur. Les blocs ont été peints pour être reconnus par une caméra basse résolution.
Le premier ordinateur pour Shakey était le SDS 940 avec moins de mémoire que le cache L2 des ordinateurs portables modernes. En 1970, il a été remplacé par le plus puissant DEC PDP-10. Shakey a parlé au PDP-10 via un processeur de communication. Ce système était l'un de ces nœuds qui ont contribué à la naissance d'ARPANET. Vers la même époque, une réécriture complète du logiciel Shakey a commencé. Le fer n'avait besoin que d'améliorations minimes.
Éléments clés de la conception des touchesLogiciel Shakey
La deuxième version du produit est basée sur deux idées fondamentales. La première consiste à représenter le monde de Shakey à travers le calcul des
prédicats de premier ordre , en complétant le formulaire par un modèle de grille - un élément clé de la première version.
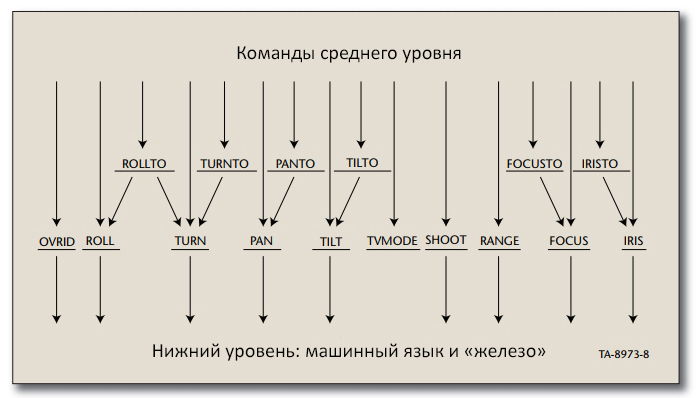
La deuxième idée était de structurer le logiciel Shakey en plusieurs couches. Cette approche de contrôle du robot a été utilisée pour la première fois. Ensuite, nous décrivons brièvement chaque niveau, en commençant par les commandes de niveau inférieur.
Équipes de niveau inférieurLes commandes de niveau inférieur, telles que ROLL et PAN, ont été envoyées directement au composant matériel Shakey. À ce niveau se trouvent également des équipes telles que PANTO, qui était chargé de tourner la «tête» de l'appareil dans la direction choisie.
 Équipes de niveau intermédiaire: chaînes de Markov
Équipes de niveau intermédiaire: chaînes de MarkovÀ ce niveau, il y a des équipes telles que GOTHRUDOOR («franchissez la porte»). Ils ont été attribués à un niveau distinct, car ils étaient tous représentés comme
des chaînes de Markov .
Chaîne Markov pour l'équipe GOTHRUDOORLes chaînes de Markov peuvent être «lues» en balayant d'abord la colonne de gauche jusqu'à ce que la première vraie condition soit atteinte qui exécute l'action correspondante, puis en revenant au début du tableau. En conséquence, les chaînes de Markov sont caractérisées par la stabilité (cet algorithme d'actions est légèrement simplifié, mais la pratique du «retour au début» est fondamentale et, comme nous le verrons, une caractéristique importante de ces chaînes).
Si les équipes de niveau intermédiaire étaient les dernières que Shakey pouvait exécuter, le robot serait très limité dans ses actions. Il ne pouvait atteindre des objectifs qui ne nécessitent qu'une seule action préprogrammée. Pour en faire plus, Shakey devait pouvoir établir une séquence d'actions (sous forme de plan). L'ordonnanceur automatique STRIPS (Stanford Research Institute Problem Solver) était responsable de cela. Il était le prochain niveau de logiciel supérieur.
STRIPS, Stanford Research Institute Solutionneur de problèmesLe programmateur automatique STRIPS est né de la combinaison de deux grands concepts. Le premier était une stratégie de planification appelée analyse des buts et des moyens. Il est présenté dans le système «General Problem Solver» par Herbert Simon et Allen Newell.
Le deuxième concept était la preuve du théorème dans le calcul des prédicats et son application dans les systèmes question-réponse. Ceci est discuté dans les travaux de Cordell Green. Richard Fykes et Niels Nielson ont combiné ces connaissances pour créer STRIPS en 1971, qui a utilisé l'analyse des objectifs et des moyens pour calculer les prédicats.
PLANEX, Plan Execution ExecutivePeu de temps après la création de STRIPS, l'équipe de l'institut a trouvé un moyen de généraliser le plan STRIPS en remplaçant les constantes du système par des variables. Ils ont également inventé une structure de données appelée la table triangulaire, qui démontre les interdépendances internes d'un plan générique. Ces conceptions ont constitué la base du système PLANEX, le dernier niveau du logiciel Shakey (Fykes, Hart et Nielson, 1972).
À l'aide de ce logiciel, PLANEX peut surveiller la mise en œuvre réelle du plan. Le système peut remarquer si quelque chose s'est mal passé et reprogrammer le travail à partir de ce moment, en réutilisant des parties du plan existant si possible. Il peut même s'agir d'une décision «entrepreneuriale»: si Shakey est soudainement plus près de terminer sa tâche, il peut la tourner à son avantage.
Cette capacité à détecter et à récupérer les erreurs était un élément essentiel du logiciel Shakey. Il y a une grande différence entre créer un plan d'action pour un vrai robot qui fonctionne dans le monde réel, où quelque chose pourrait mal tourner, et un planificateur «abstrait» qui imprime simplement un plan symbolique. Les chaînes PLANEX et Markov sont devenues la solution pour réaliser une planification fiable et réelle.
Hiérarchie des niveaux du logiciel ShakeyVision par ordinateur
Le plan de projet initial ne nécessitait pas de recherches intensives dans le domaine de la vision par ordinateur. Le plan était plutôt d'intégrer les techniques de vision par ordinateur existantes dans une plate-forme expérimentale. Mais il s'est avéré qu'à l'époque il y avait très peu de technologies disponibles, de sorte que les spécialistes ont dû travailler dur dans le domaine de la recherche en vision par ordinateur.
L'un des résultats importants de ce travail a été l'invention de ce que l'on peut appeler la forme moderne de la transformée de Hough, une méthode utilisée pour extraire des éléments d'une image (R. Duda, P. Hart, 1972). Cet objectif a été atteint en combinant deux concepts qui, à première vue, semblent totalement indépendants.
La première idée est contenue dans le brevet Paul Hough. Il décrit la transformation des points du plan image en lignes droites dans l'espace de transformation. Les lignes qui se croisent dans ce dernier correspondent à des points colinéaires de la forme. Mais le problème des pentes sans fin se pose, ce qui rend cette transformation lourde en termes de calcul.
La deuxième idée vient de la géométrie dite intégrale. Les mathématiciens avaient des raisons théoriques d'utiliser la paramétrisation du rayon angulaire de la ligne plutôt que l'ordonnée à l'origine plus familière utilisée par Hough. Peter Hart a noté qu'en remplaçant la transformée de Hough linéaire par une transformée sinusoïdale, non seulement le problème des pentes infinies est résolu, mais la nouvelle transformée est invariante aux coordonnées. De plus, Peter Hart et Richard Duda ont étendu cette méthode pour détecter les courbes analytiques dans les images, et cette transformation a été utilisée depuis.
Navigation et algorithme A *
Shakey devait se concentrer sur le terrain, donc plusieurs algorithmes de chemin les plus courts ont été développés. L'un d'eux, appelé A *, a été créé par Peter Hart, Niels Nielson et Bertram Raphael. Le nouvel algorithme avait des propriétés très utiles: d'une part, il trouvait toujours le chemin le plus court, et d'autre part, alors qu'il sélectionnait le nombre minimum de possibilités alternatives. Nous pouvons dire que cela fonctionne toujours et qu'il est efficace sur le plan des calculs.
Vous pourriez penser qu'un résultat aussi significatif accueillerait avec plaisir toute publication, mais il s'est avéré l'inverse. La présentation de l'algorithme A * a été rejetée par toutes les prestigieuses revues scientifiques de l'époque.
En regardant à travers ces anciennes critiques, vous pourriez penser que les éditeurs ont donné un rapport aux mathématiciens à lire à cause de tous ces théorèmes effrayants. Cependant, les mathématiciens n'ont pas été impressionnés, car seuls les graphiques avec un nombre fini de nœuds ont été présentés à partir des preuves. À cette époque, il semblait aux auteurs que les mathématiciens ne voyaient pas la différence entre un graphique à dix nœuds et un graphique à dix billions de nœuds. Mais pour les scientifiques travaillant dans le domaine de l'informatique, cette différence est significative.
Au final, le rapport a été accepté à l'Institut des ingénieurs électriciens et électroniciens (Transactions IEEE sur la science des systèmes et la cybernétique) et continue d'être référencé pendant plus de 45 ans.
Le monde à cette époque
Ce qui précède donne une idée de la partie (bien que loin du volume entier!) Du travail effectué par l'équipe de projet Shakey. Pour avoir une idée de ce travail dans un contexte social plus large, regardons le climat intellectuel et culturel de cette époque.
En 1970, un gros article sur le projet Shakey a été publié dans le populaire magazine Life. L'auteur, le journaliste Brad Darrach, semble être allé trop loin avec le titre: "La réalité fascinante et terrible d'une machine avec son propre esprit." Cependant, alors que certains pensaient que les robots pouvaient asservir le monde, d'autres étaient assez sceptiques à l'égard de tels articles. Hubert Dreyfus était l'un de ceux qui, d'un point de vue philosophique, ont soutenu que le concept de l'IA est fondamentalement irréaliste. Et quelque part entre Darrach et Dreyfus, il y avait ceux qui craignaient que les robots puissent un jour prendre des emplois humains.
Article de magazine Shakey's LifeInvités clés
Les développeurs du robot ont accueilli tous les visiteurs intéressés par leur travail. Un examen des réactions obtenues en dit long sur l'état du monde à cette époque. Voici quelques exemples:
- Un groupe d'écoliers a visité le laboratoire. L'enseignant qui les accompagnait a demandé ce que les ingénieurs avaient de "vrai travail": "Ce robot est votre hobby, non?"
- Le général a demandé si un couteau de 36 pouces pouvait être monté sur le robot.
- Arthur Clarke a visité le laboratoire immédiatement après la sortie du film "Space Odyssey de 2001", mais était plus intéressé à parler de la revue du film par le New York Times qu'à discuter de l'avenir des robots.
- Un lycéen a conduit de Seattle à Menlo Park en Californie pour voir Shakey. Des décennies plus tard, Bill Gates a rappelé que ce qu'il avait vu était impressionnant.
- Un auditeur du gouvernement américain a demandé si le SRI avait vraiment pris en charge la livraison de milliards de «bits de paquets». Cette question a été suivie par d'autres, y compris si la corrosion a été remarquée sur l'un de ces bits.
Achèvement du projet Shakey
Le projet Shakey a été fermé en 1972 - non pas par manque d'idées, mais par manque de financement. Qu'est-ce qui a été réalisé au cours de son existence?
Il y avait autant d'opinions sur ce score que de membres d'équipe, mais plusieurs généralisations peuvent être faites:
- De nombreux résultats privés du projet (STRIPS, PLANEX, algorithme A * et une nouvelle forme de transformation de Hough) sont devenus une contribution technique importante.
- Dans l'ensemble, Shakey a été une réalisation importante. Il a été à la fois le premier robot intelligent mobile et le premier système à combiner logiciel avec IA et matériel physique.
- Les capacités générales de Shakey, en termes de mécanique et de logiciel, n’ont pas atteint le niveau des aspirations initiales. Cela n'est pas surprenant, compte tenu du niveau de réclamations initialement élevé. Il a fallu des décennies pour atteindre certains des objectifs énoncés, tandis que d'autres restent encore sans réponse.
Références:
1. "Shakey: de la conception à l'histoire". Article d'origine. La deuxième partie du matériel parle de la poursuite de l'application des découvertes du projet Shakey. Allez à
2. "Combien faut-il pour refaire Shakey the Robot?" - Une tentative de reproduire Shakey dans des conditions modernes. Allez àPour en savoir plus sur la robotique, visitez robo-hunter.com:Science populaire: