Cet article décrit comment en un soir un focus de suivi pour un miroir a été fait de merde et de bâtons. Vidéo de ce qui s'est passé:
Préface
Les framboises sont redondantes ici, sans aucun doute. Mais si nous parlons d'un appareil plus complexe dans lequel le focus de suivi n'est qu'une des fonctions, alors pourquoi pas.
Je n'ai rien trouvé de nouveau, je l'ai juste pris et l'ai fait en une soirée. J'ai aimé le résultat, donc je veux partager avec la communauté.
Mécanique, montage
Pour moi, la mécanique est toujours une pierre d'achoppement. Trouver de la merde et des bâtons sous vos bras qui sont compatibles les uns avec les autres, tout en vous permettant d'atteindre votre objectif - peut être difficile. Mais cette fois, j'ai eu de la chance.
Le prototype ressemble à ceci:
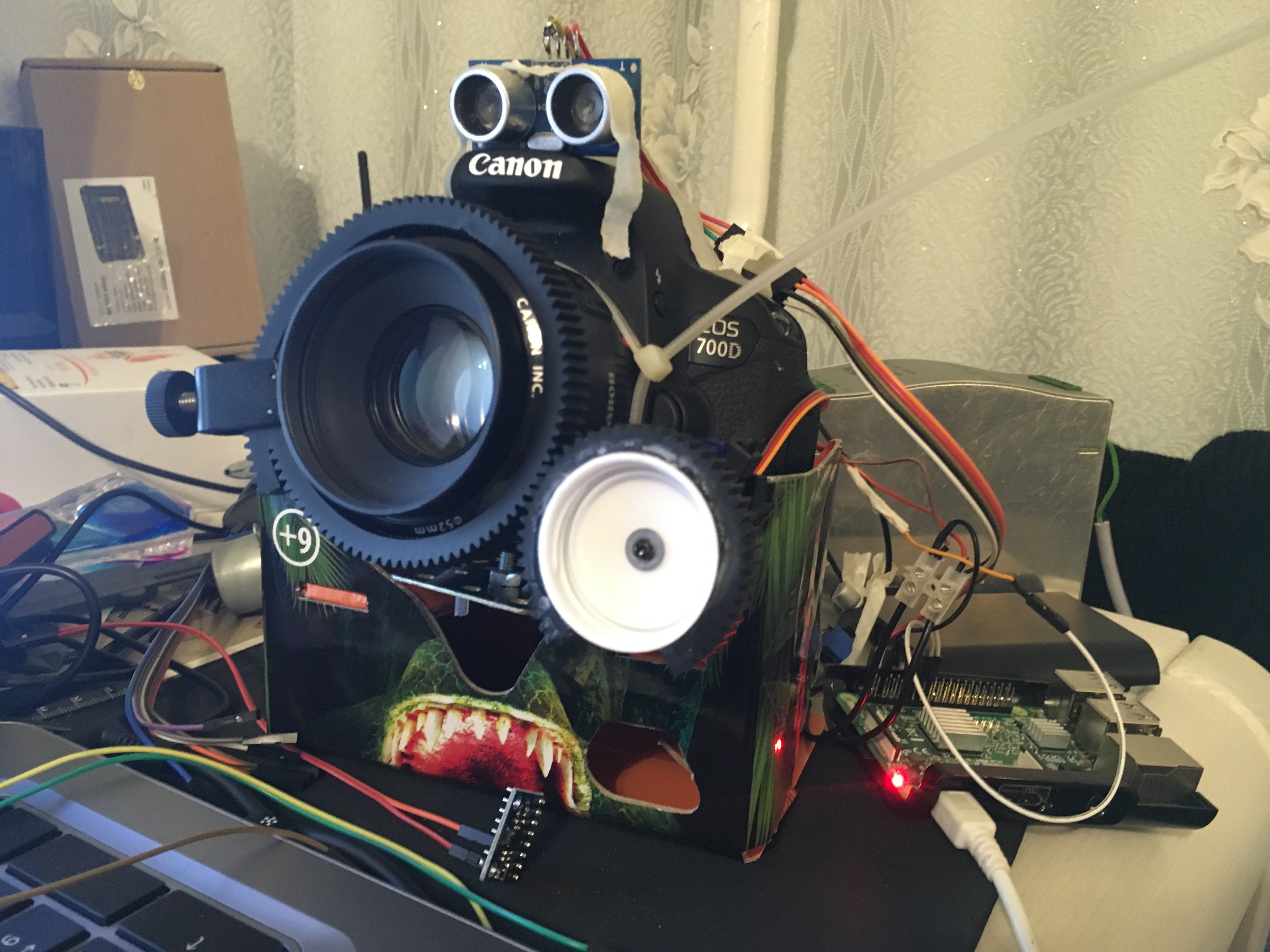
Comme engrenage sur l'axe du serveur, j'ai utilisé le couvercle de la boîte à lait sur laquelle j'ai collé le reste du collier d'engrenage pour l'objectif SLR. Le bouchon de lait dans mon cas s'est avéré être le diamètre optimal pour un ajustement sur un objectif de 50 mm. J'ai collé le «train» à l'aide de cyanoacrylate avec de la soude sur l'un des culbuteurs fournis avec le servo et je l'ai vissé. Pour fixer la structure au reflex numérique, vous avez besoin d'une vis avec un filetage en pouces, j'en ai trouvé une à partir d'un trépied de pieuvre.
En général, le design s'est en quelque sorte incarné dans la réalité:

Aujourd'hui, c'est difficile sans chape. Le ruban bleu s'est terminé et j'ai dû monter le capteur sur du papier adhésif.
Électronique
J'utilise le Raspberry Pi 3 comme cerveau. J'alimente le servo avec une alimentation séparée de 24 V CC avec un convertisseur abaisseur CC-CC sur un microcircuit LM2596 avec une sortie de 7,2 V.
L'algorithme de travail est simple à déshonorer. Il y a un retour sur la distance à l'objet du télémètre à ultrasons HC-SR04, qui est converti en un angle de rotation du servo SG-90. Un «engrenage» est fixé sur l'axe des servos, qui fait tourner la lentille à travers le pignon, définissant la distance focale.
Code
La connexion d'un capteur à ultrasons est décrite
ici . Le contrôle servo se fait en utilisant du matériel PWM, j'ai pris les paramètres
ici .
Le code s'est avéré très modeste, mais ce n'est que le début et il n'y a pas de limite à la perfection.
Pour déterminer la correspondance de l'angle de rotation du servo à la distance focale, j'ai fait plusieurs mesures d'étalonnage, en conséquence j'ai reçu une dépendance linéaire sur la zone d'intérêt (40-70 cm), le reste a été pris comme foyer à l'infini.
Conclusion
À mon avis, même les serveurs SG-90 les moins chers sont capables de beaucoup, une tige de 1,2 kg / cm pour un tel bébé, et même avec une telle vitesse - c'est cool, surtout pour un prix de 1,5 dollar. Il en va de même pour le télémètre à ultrasons.
P.S. Le serveur peut être contrôlé séparément du capteur, par exemple, pour effectuer des transitions rapides d'un objet à un autre avec des focales différentes. De plus, pour améliorer le système, vous pouvez ajouter un filtre qui compensera les lacunes de la mesure du capteur à ultrasons.