BigDog a été le premier robot Boston Dynamics à devenir largement connu. À bien des égards, c'est lui qui a «fait le nom» de son créateur d'entreprise. Un robot pour l'armée, abandonné par l'armée, et le premier robot Boston Dynamics, que les développeurs ont donné un coup de pied à la caméra.
Maintenant, le projet a pris fin, mais il est devenu la base des développements ultérieurs de la société - Cheetah et New Spot, des vidéos avec lesquelles il est rapidement devenu viral.
Aujourd'hui, nous allons essayer de comprendre l'appareil BigDog à partir des mots de ses développeurs. Les auteurs ont publié l'article original en 2008, mais il n'a toujours pas (en quelque sorte) été traduit en russe. Il raconte les principaux composants du robot et les algorithmes qui coordonnent sa démarche. L'objectif du projet BigDog est la création d'appareils autonomes avec des jambes capables de se déplacer sur un terrain accidenté. Ils doivent être supérieurs aux véhicules à roues et à chenilles existants. Un système idéal devrait aller partout où une personne ou un animal peut aller, courir pendant des heures et porter du poids sous la forme de son propre carburant et de sa charge utile. Elle est assez intelligente pour traverser le terrain avec un minimum d'intervention et de contrôle humains.
Les robots créés par BigDog ont aidé à franchir plusieurs étapes pour atteindre ces objectifs, même s'il reste encore beaucoup de travail à accomplir.
BigDog a des systèmes embarqués qui fournissent de l'énergie, de l'énergie, la collecte de données environnementales, la surveillance et la communication. La puissance est fournie par un ICE à deux temps refroidi par eau, qui fournit environ 15 ch. Il entraîne une pompe qui délivre de l'huile hydraulique via un système de filtres, de collecteurs, de batteries aux actionneurs des pieds du robot. Les actionneurs sont des vérins hydrauliques à faible friction contrôlés par des servo-valves à deux étages. Chaque actionneur possède des capteurs qui surveillent la position et la résistance des articulations. Chaque jambe a 4 actionneurs hydrauliques qui alimentent les articulations. Un échangeur de chaleur monté sur le corps BigDog refroidit l'huile et un radiateur refroidit le moteur pour un fonctionnement stable.
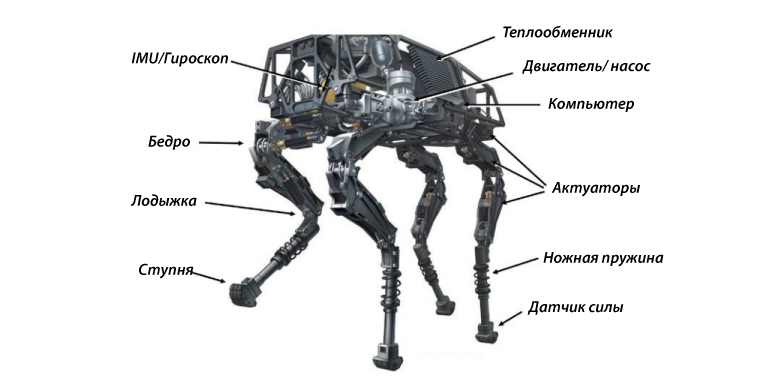 Éléments clés de conception de BigDog
Éléments clés de conception de BigDogL'ordinateur de bord contrôle le comportement de BigDog, contrôle les capteurs et est responsable de la communication avec l'opérateur distant. Il enregistre également une grande quantité de données d'ingénierie pour l'analyse des performances, l'analyse des erreurs et le support opérationnel.
BigDog possède environ 50 capteurs. Les capteurs inertiels mesurent la position et l'accélération du corps, les capteurs articulaires mesurent le mouvement et la force des actionneurs articulaires. L'ordinateur de bord traite les informations de tous ces capteurs pour donner une estimation de la façon dont le robot se déplace. Un autre groupe de capteurs contrôle l'homéostasie BigDog: pression hydraulique, débits et température, régime moteur, etc.
L'ordinateur de bord remplit des fonctions de surveillance de bas et de haut niveau. Un système de bas niveau contrôle la position des servos et la nutrition dans les articulations. Le haut niveau coordonne la position des jambes pour réguler la vitesse, la position et la hauteur du corps pendant le mouvement. Il suit également la puissance de l'interaction avec le sol pour assurer un mouvement régulier.
BigDog a de nombreuses options de mouvement. Il peut se lever, s'accroupir, marcher avec une démarche rampante, marcher, soulever un seul pied à la fois, trotter et galoper. La vitesse avec une démarche rampante est de 0,2 m / s, pour un lynx - 1,6 m / s, pour la course - 2 m / s (dans des conditions de laboratoire, l'indicateur de vitesse maximale était de 3,1 m / s). De plus, le robot peut sauter 1,1 mètre.
BigDog est généralement contrôlé par un opérateur humain qui travaille avec une unité de contrôle connectée au robot via des radios IP. L'opérateur fournit un contrôle de haut niveau du mouvement et de la vitesse. Il peut également ordonner au robot de démarrer ou d'arrêter le moteur, de se lever, de s'asseoir, de marcher ou de courir.
[Sur la façon dont l'algorithme de navigation autonome pour le robot a été développé, vous pouvez lire ici ]Un système de vision stéréo et un lidar ont été intégrés au robot. Le système de vision stéréo développé par Jet Propulsion Laboratory se compose d'une paire de caméras stéréo, d'un ordinateur et d'un logiciel visuel. Il est utilisé pour obtenir une forme 3D du paysage devant le robot et trouver son chemin. Le Lidar est nécessaire pour que BigDog puisse suivre une personne sans commandes opérateur supplémentaires.
Contrôle de la marche
Pour se déplacer à la vitesse humaine, BigDog utilise une démarche de trot équilibrée dynamiquement. Il équilibre en utilisant la vitesse latérale et l'accélération, déterminées par le comportement perçu des jambes en combinaison avec des capteurs inertiels.
Le système de contrôle BigDog coordonne la cinématique et les réactions au sol du robot, répondant aux commandes posturales de base. Le contrôleur répartit la charge entre les jambes pour optimiser leur capacité portante. La charge verticale sur les membres est maintenue aussi uniforme que possible et les jambes individuelles génèrent des réactions au sol dirigées vers les hanches pour réduire la friction.
L'algorithme de coordination de la marche responsable de la communication entre les membres déclenche le mouvement des jambes. Il est coordonné par un modèle de jambe virtuelle. Le schéma général de contrôle de marche de BigDog peut être représenté comme suit:
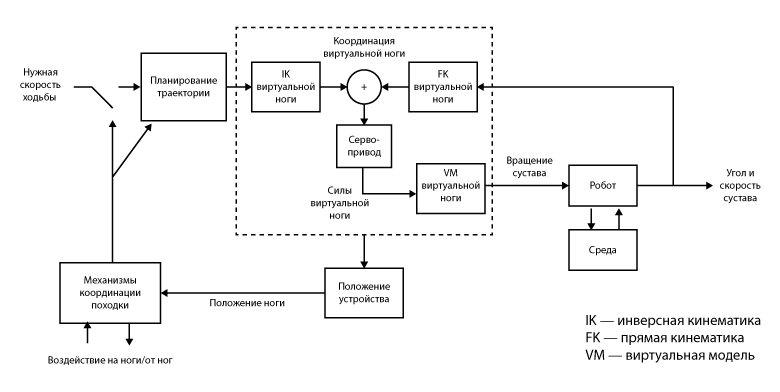 Modèle de contrôle de marche BigDog
Modèle de contrôle de marche BigDogNous avons développé des algorithmes de marche pour les terrains accidentés et les avons testés en modélisation physique avant de les tester sur un robot. Un robot simulé marche le long des pentes à un angle allant jusqu'à 60 degrés. L'algorithme de son mouvement varie selon qu'il passe sur une surface plane ou sur une pente. De plus, il prend en compte les obstacles inattendus sur le chemin, tels que les pierres ou les fosses.
La modélisation physique a été utilisée pour développer des algorithmes de démarche.Le système de contrôle utilise les informations du capteur articulaire pour déterminer si les «jambes» sont actuellement au sol et déterminer la charge sur chaque membre et la conduite. L'algorithme d'état contrôle la position du corps, coordonnant la cinématique des membres avec les forces de réaction des jambes en contact avec le sol. L'algorithme d'état implémente le mouvement correct des jambes sur une surface inégale. Cela vous permet de contrôler les virages, les marches et la hauteur du corps par rapport au sol, permettant ainsi à BigDog de s'adapter aux changements du paysage sans capteurs d'un niveau de perception plus élevé du terrain.
BigDog s'adapte au terrain de deux manières. Il régule la hauteur et l'attitude du corps au paysage et contrôle où mettre les pieds. En montant et en descendant des pentes, le corps du robot s'incline. Les pentes raides (plus de 45 degrés) que le robot surmonte en corrigeant la démarche et en utilisant des étapes plus petites.
À la fin de l'article, les auteurs remercient les 23 personnes de l'équipe BigDog et partagent leurs plans pour l'avenir: renforcer le corps du robot, rendre BigDog autonome et le rendre plus silencieux (le moteur à essence fait du bruit comme une moto). Le dernier point, comme l'a montré le temps, est resté un problème grave.Plus sur la robotique sur robo-hunter.com: