Salut à tous, J'ai vu une fois que les sous-marins avec une longue portée, des fonctionnalités moins ou moins tolérables et moins que le tout nouvel iphone ne sont pas à vendre, et j'ai décidé de le faire moi-même.
Il est contrôlé via Internet et Internet mobile couvre désormais une grande partie de la Russie. Les petits étangs en sont entièrement couverts et, depuis les rives du grand Internet, il y a même des dizaines de kilomètres de la côte.
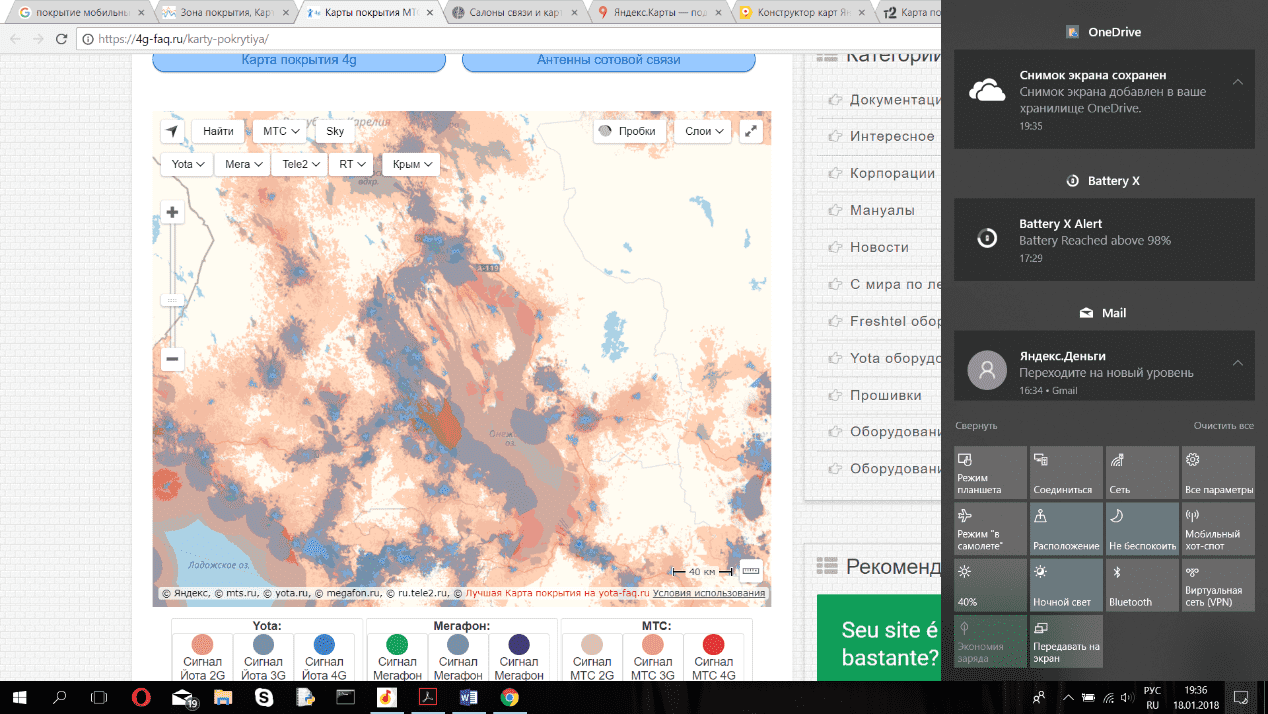
Elon Musk a également annoncé la création d'un Internet mondial.
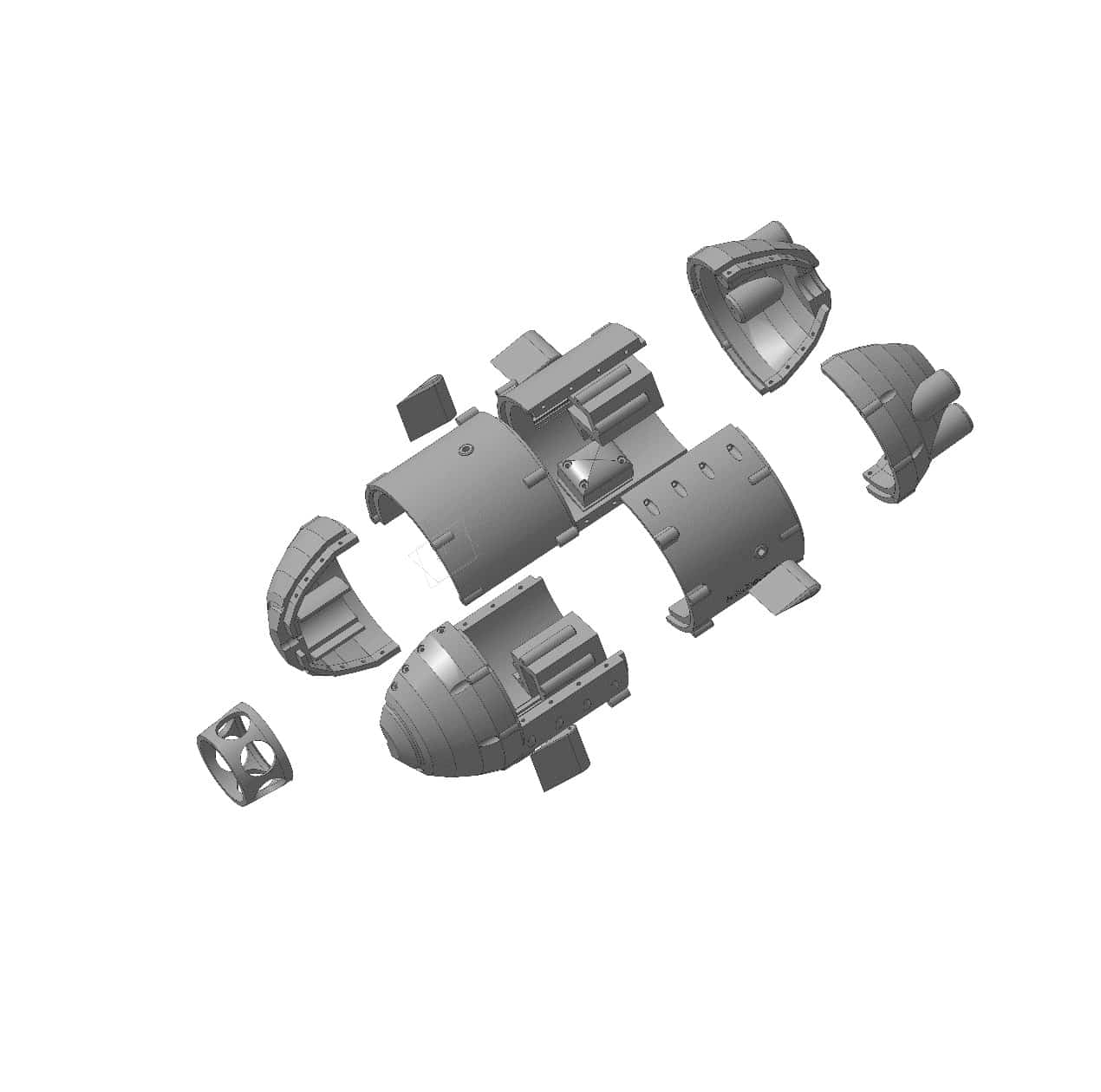
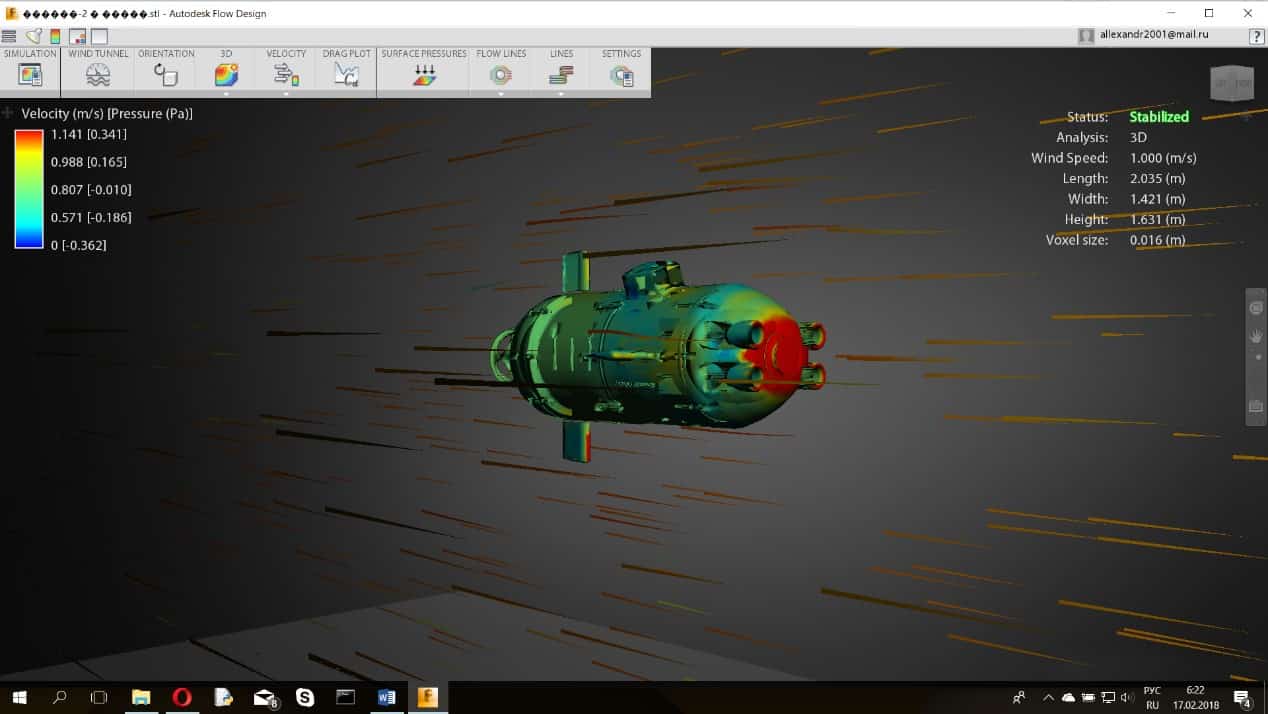
J'ai décidé d'imprimer le bateau sur une imprimante 3D, les modèles sont réalisés en compass_3d. Le code est écrit en python 3.
Lien vers github .
Équipement et matériel
• imprimante 3d
• Ordinateur monocarte Raspberry pi
• Modems 4g (2 pièces)
• ordinateur portable (2 pièces 1er - émetteur, 2e - serveur)
• servomoteurs
• webcam
• moteur
• Piles Pb
• autres (relais, fer à souder, capteurs, adhésifs, peintures, mastics ...).
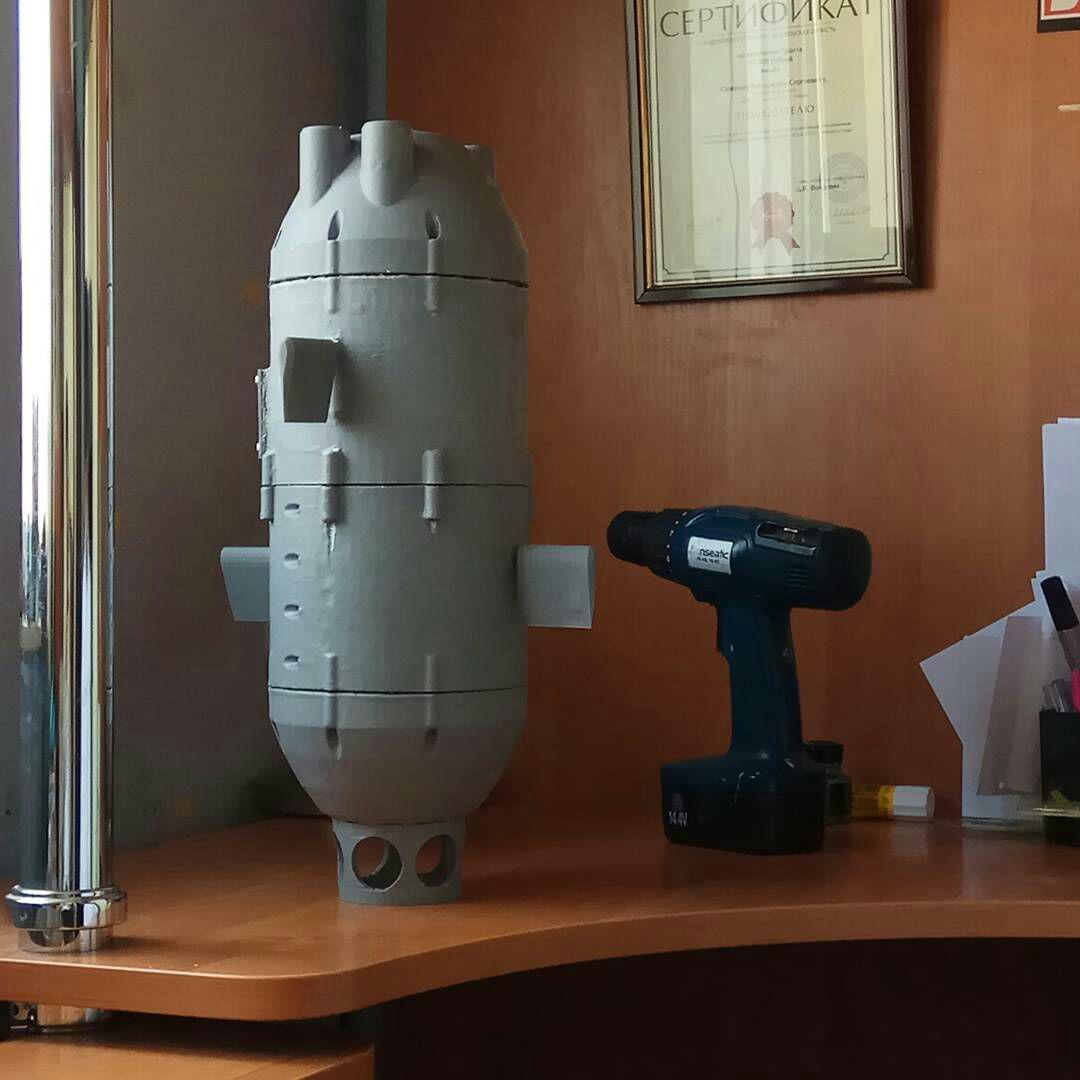
Détails
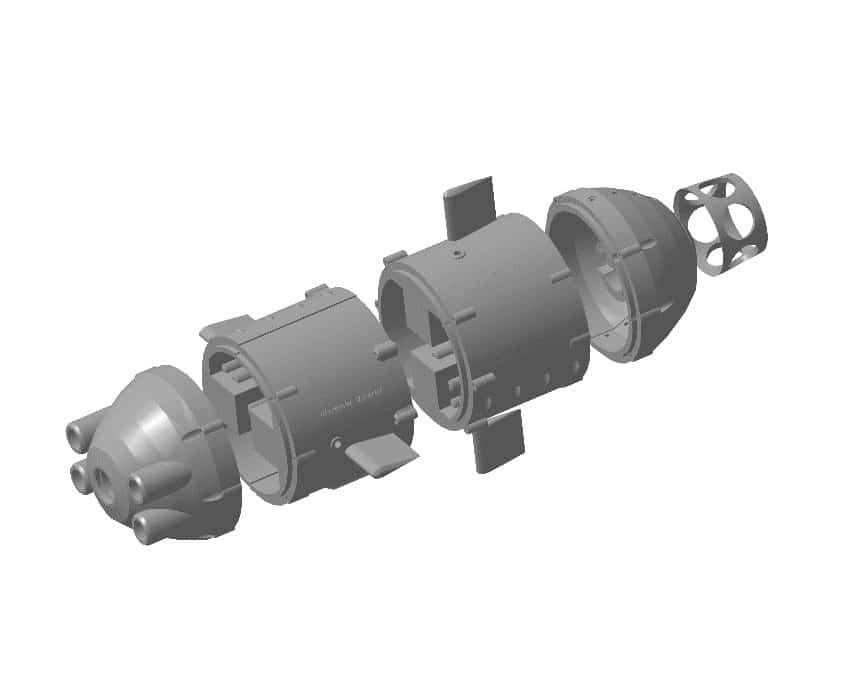
Comme déjà mentionné, les détails sont imprimés sur une imprimante 3D avec une couche de 0,3 mm avec une buse de 0,4 mm
sur une table en aluminium avec un substrat de colle bf2 pour une meilleure adhérence, les détails les plus longs ont été imprimés environ 14 heures. Dessin d'assemblage inférieur.
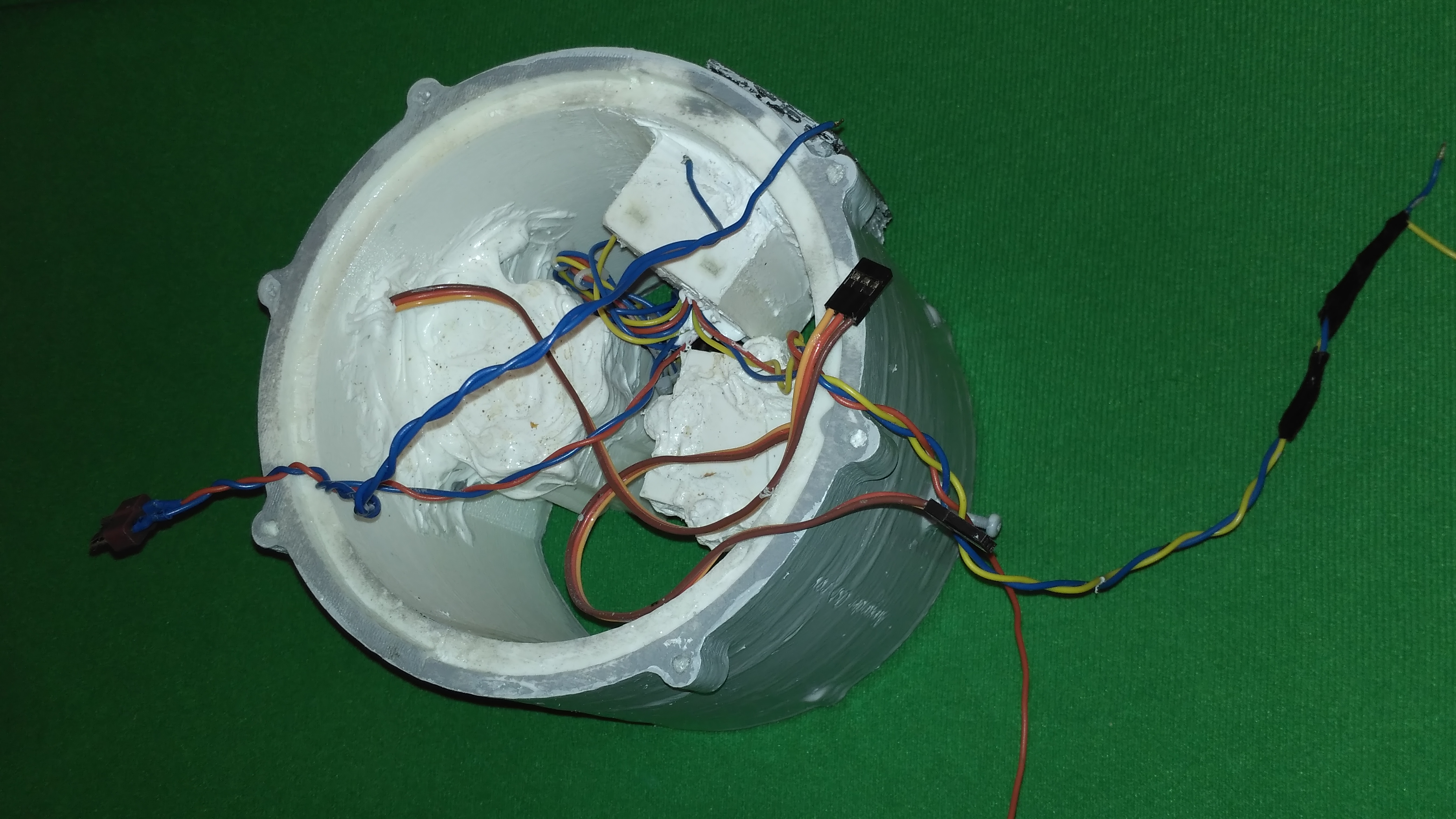
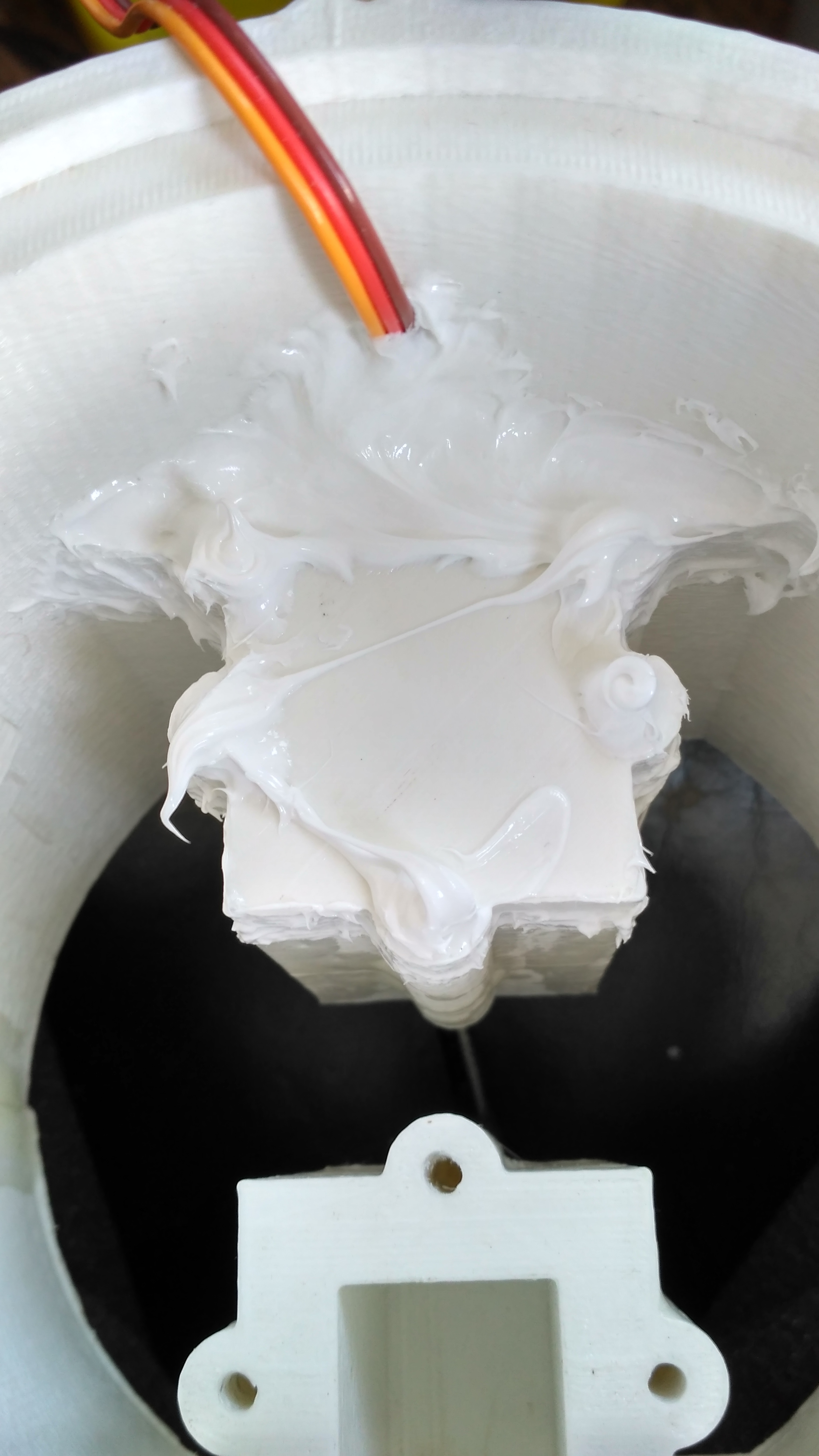
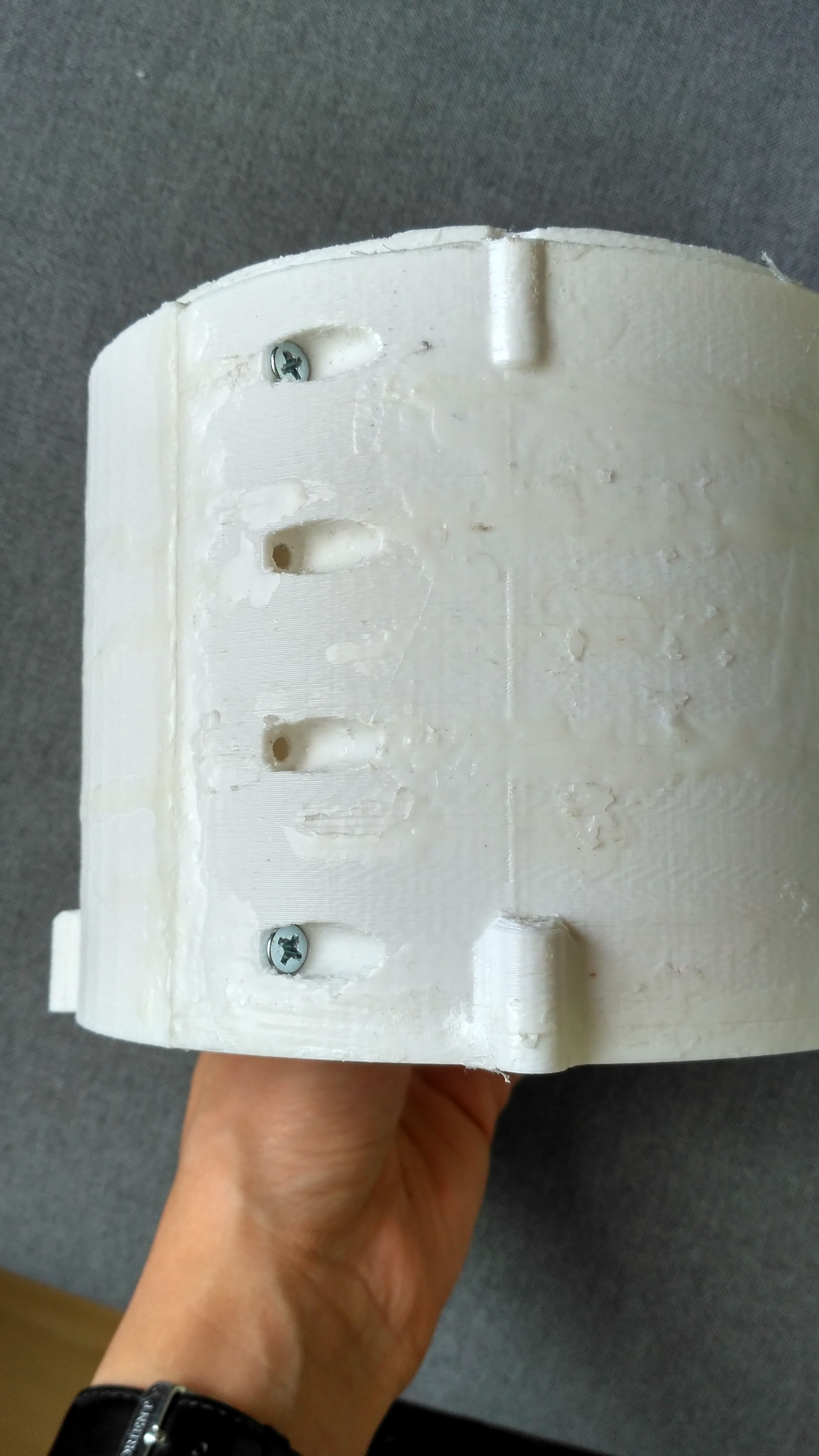
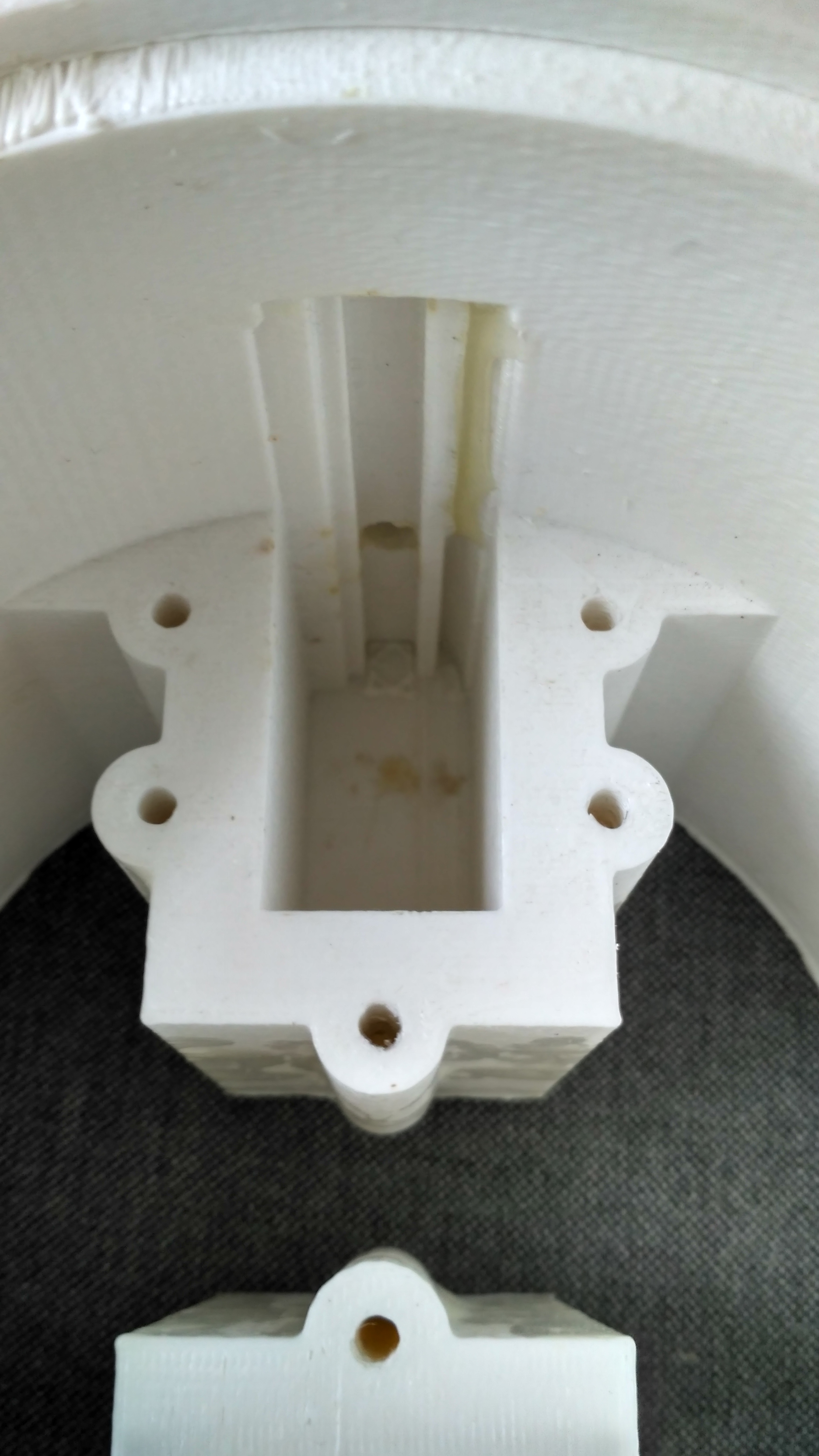
Étanchéité
Pour l'étanchéité, les servomoteurs et le moteur principal de la Colombie-Britannique sont scellés avec du mastic silicone et de la graisse. Le bateau lui-même, en raison de la taille de ses pièces et de la tendance du plastique ABS à rétrécir (redimensionnement après impression), à certains endroits ces endroits craquelés avec de la colle pour pvc, dans des endroits de joints boulonnés de silicone pour aquariums.
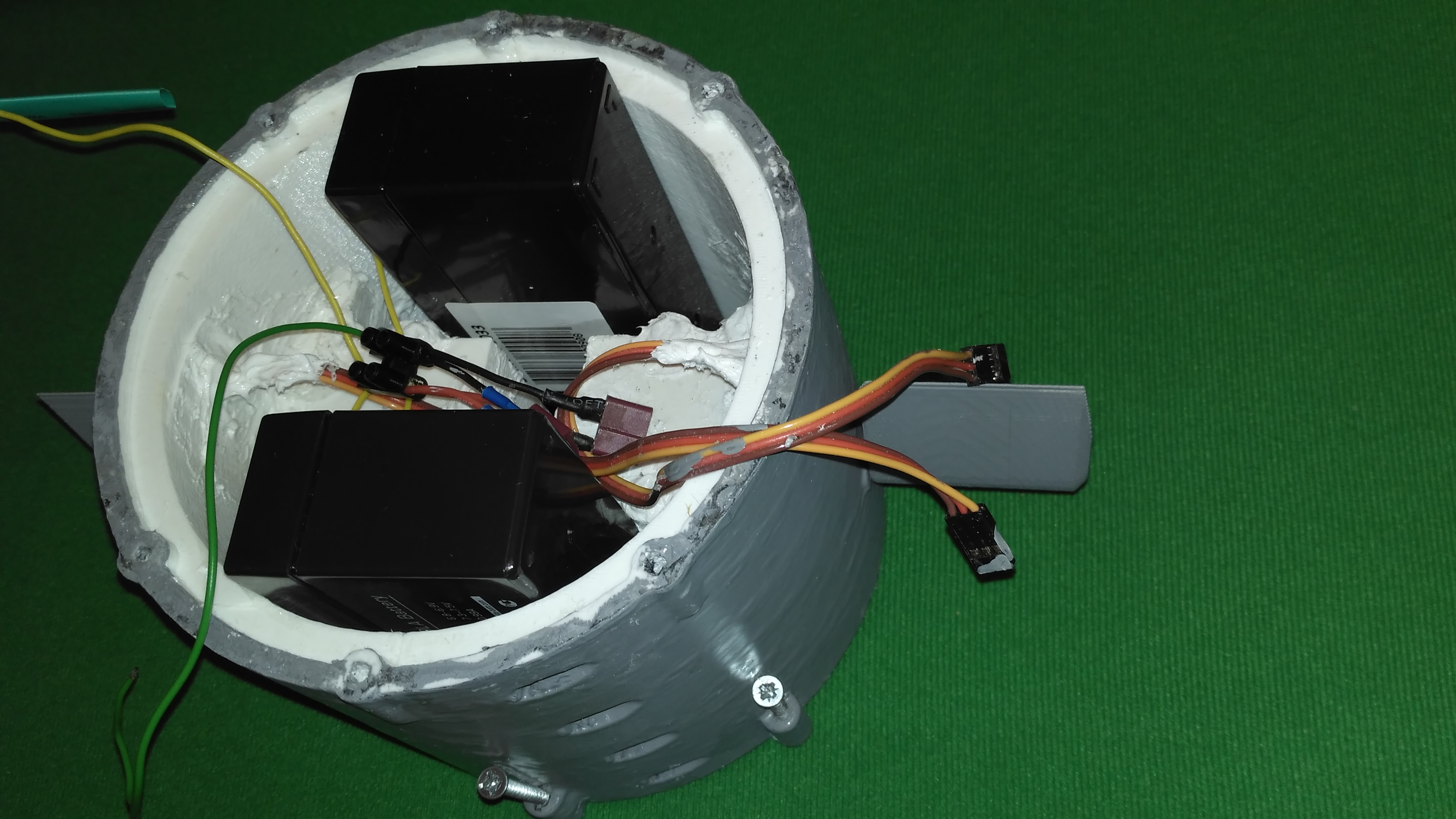
La nutrition
En tant que source d'alimentation - deux batteries au plomb 6v connectées en série capables de fournir 3,3 AmH, les batteries au plomb sont utilisées car elles sont moins chères, moins de contacts de charge doivent être conduits à l'extérieur du bateau et ils sont également lourds (le bateau est trop encombrant et sa moyenne la densité doit être d'environ 1000 kg / m ** 3).
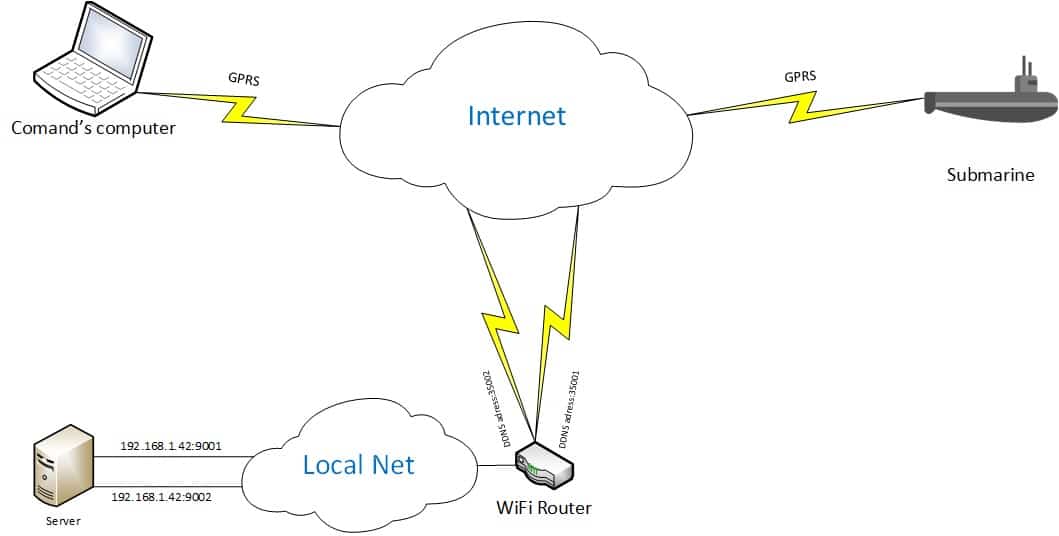
Transfert de données
Maintenant, l'essentiel, le transfert de données.
L'eau absorbant l'EMV, le modem doit être amené au sommet pour que le bateau fonctionne avec un flotteur.
Dans le réseau local, à la maison, un serveur est installé qui transfère tout ce qui y arrive d'une adresse à une autre. À l'heure actuelle, le bateau transmet la vidéo et l'ordinateur portable commande le contrôle. Tout cela est organisé via des sockets.
Comme je voulais en faire le plus possible pour la rendre plus intéressante
, et pour réinventer la roue , j'ai fait la transmission vidéo moi-même, comme je l'ai déjà dit, donc sans rien inventer de mieux, j'ai décidé de ne pas transférer la vidéo, mais les images en jpg. Une image est transmise, puis le mot d'arrêt «stop» est empoisonné, et comme il n'apparaît pas en jpg, le code sépare facilement où et quand afficher l'image.
while bytes('stop','utf-8') not in data: image_result.write(data)
Lecture des images et réception de l'appareil photo à l'aide de l'opencv. Il n'y a pas encore de compression, donc le retard peut atteindre 9-13 secondes. Les boutons de commande sont écrits à l'aide de Tkinter.
Modèle inférieur 3D
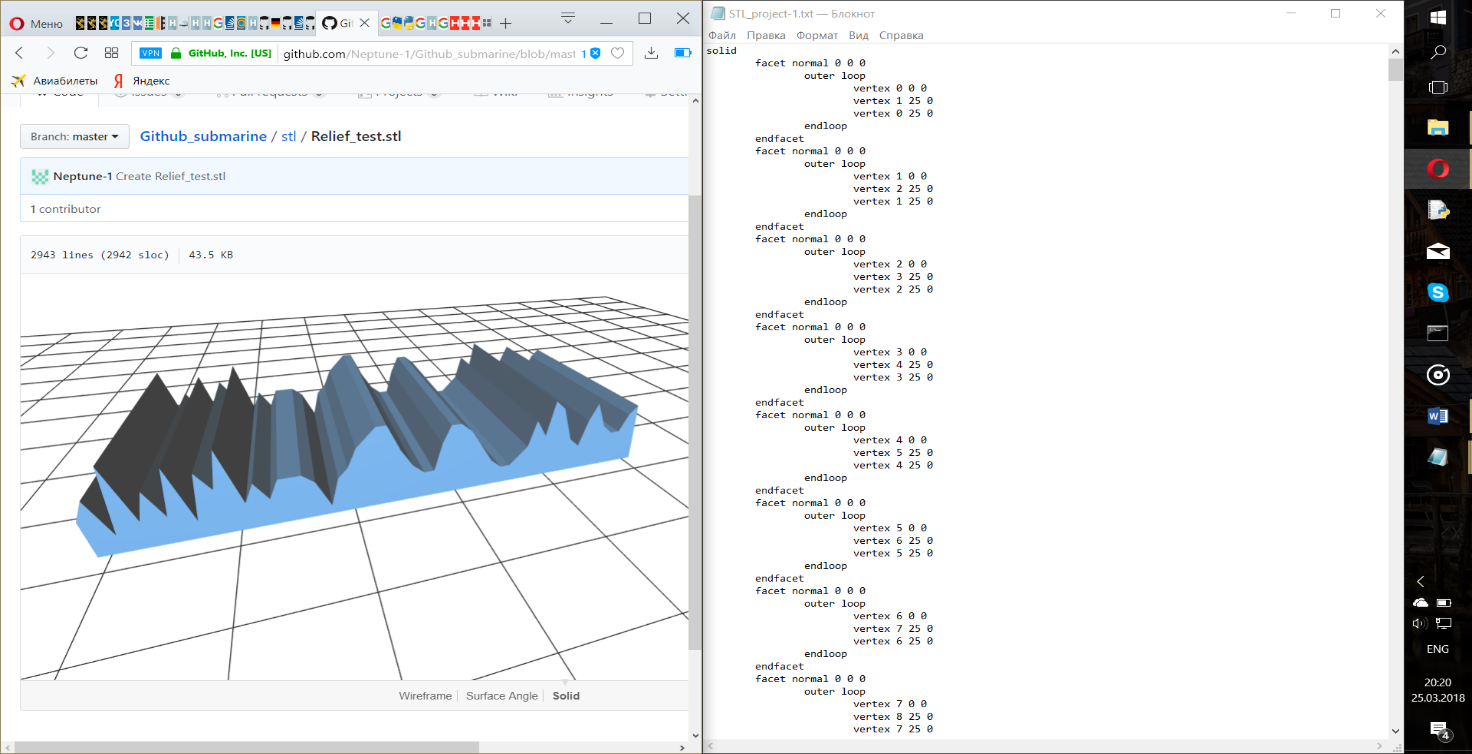
Lors du téléchargement du modèle 3D sur github, j'ai vu en quoi consistait le fichier stl et j'ai décidé d'écrire le code pour créer un modèle 3D de la topographie inférieure à partir de la liste des distances prises avec lui par un télémètre à ultrasons (qui n'a pas encore été installé).
exemple tetrahedron.stl en txtsolid
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 2 0 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 2 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 2 0 0
endloop
endfacet
endsolid
Voici des photos intéressantes et pas très




Résumé
C'est en fait tout ce que je voulais dire, mon idée principale qui ne comprenait pas était la création d'un appareil qui permet de recevoir des informations sous l'eau à une grande distance du portable de contrôle. Au revoir, jusqu'au prochain article.