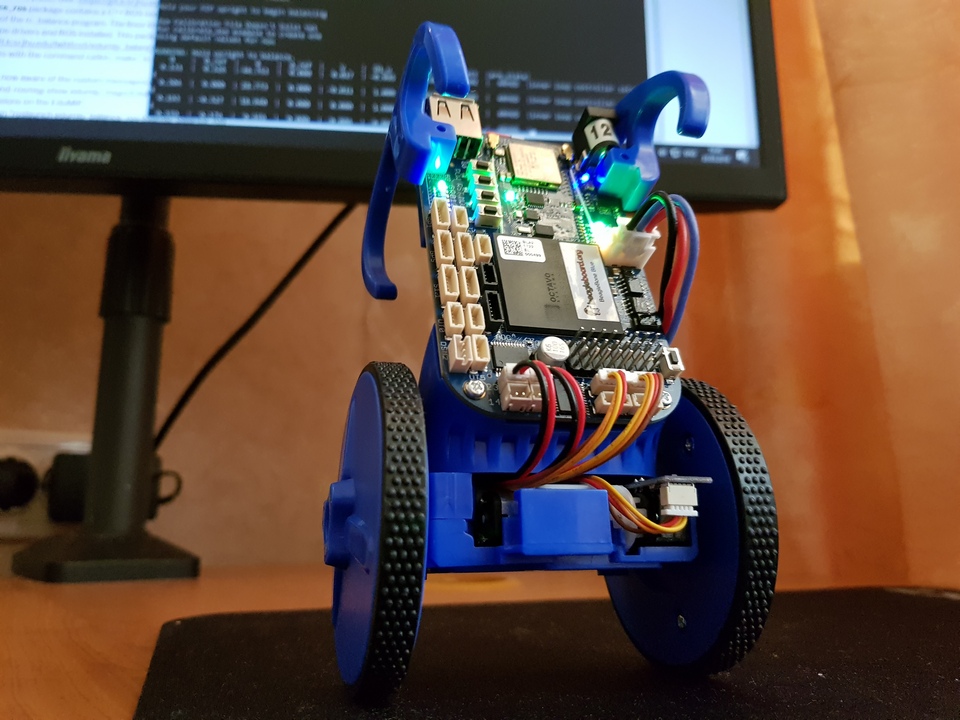
Le robot peut garder un équilibre sur deux roues, rouler assez vite. À bord de Linux complet, il y a le wifi. Vous pouvez programmer via l'interface Web. Il existe des instructions et des sources pour exécuter ROS dessus. En général, beaucoup de possibilités de créativité.
Je veux depuis longtemps jouer avec un robot avec un gyroscope, un accéléromètre, une boussole et oui pour apprendre le ROS. Je ne voulais rien souder et bricoler comme avant. BeagleBone dispose donc d'un PC payant avec une carte d'extension intégrée pour les robots BeagleBone Blue, qui dispose des capteurs et des pilotes de moteur nécessaires. Après un certain temps, le kit d'assemblage du robot EduMip aux États-Unis a été finalisé pour lui et ils ont écrit des instructions pour lancer ROS dessus avec les sources. En général, j'ai pris feu.
Ce qui est inclus dans le kit:
- empattement avec moteurs / engrenages / roues / encodeurs / fils
- LiPo 2 cellules 1400 mAh
- Chargeur 12 volts
- Beagle bone blue
EduMIP a été créé au Laboratoire de Robotique de LABORATOIRE COORDONNÉ UC SAN DIEGO. Utilisé dans les cours en ligne, les universités et les cercles de robotique.
EduMIP est une plateforme d'apprentissage:
- Modélisation dynamique et contrôle de rétroaction des systèmes instables.
- Planification des mouvements du robot et évitement des collisions.
- Commande de moteur à courant continu via des ponts en H et des encodeurs.
- Évaluation de l'orientation via IMU et baromètre.
- Communication via WiFi (802.11 b / g / n) et Bluetooth (4.1 / BLE).
- Chargement, équilibrage, protection et surveillance de la batterie LiPo 2 (incluse).
- Programmation C multithread et orientée événements dans Debian Linux.
EduMIP est compatible avec Python, ROS, MATLAB & Simulink et LabVIEW.
Le châssis EduMip a été développé en collaboration avec WowWee.
EduMIP est facile à étendre avec l'impression 3D, il existe une vaste bibliothèque de logiciels pour des millions de capteurs et dispositifs de communication standard via: USB, I2C, SPI, CAN, UART (GPS, DSM2), PWM (servos, ESC), GPIO, ADC.
Tout de même, j'ai dû acheter un autre fer à souder pour souder les fils aux moteurs, pour cet argent, nous avons pu souder immédiatement. Le reste du kit est de très bonne qualité et bien emballé.
Recueilli en une soirée. Les moteurs et les roues sont à mon avis spongieux. Je suis content qu'il n'ait pas été nécessaire de souder pratiquement toute l'électronique sur une seule carte. La batterie est chargée via la carte, à partir du script, vous pouvez voir la tension de la batterie.
Un avantage indéniable pour moi est que BedgleBone a un wifi intégré et un linux complet. L'IDE Cloud9 est immédiatement disponible et vous pouvez programmer le robot en direct en python et dans d'autres langages de programmation. La carte a intégré 4 gigaoctets de mémoire sur lesquels Linux Debian est déjà écrit, vous pouvez donc démarrer et programmer sans lecteur flash. Uniquement pour ROS, vous devez écrire l'image sur une carte mémoire.
Dans la partie suivante, je vais analyser comment le programmer, tandis que je suis coincé sur la façon d'installer des bibliothèques supplémentaires à partir de ce robot dans Debian.