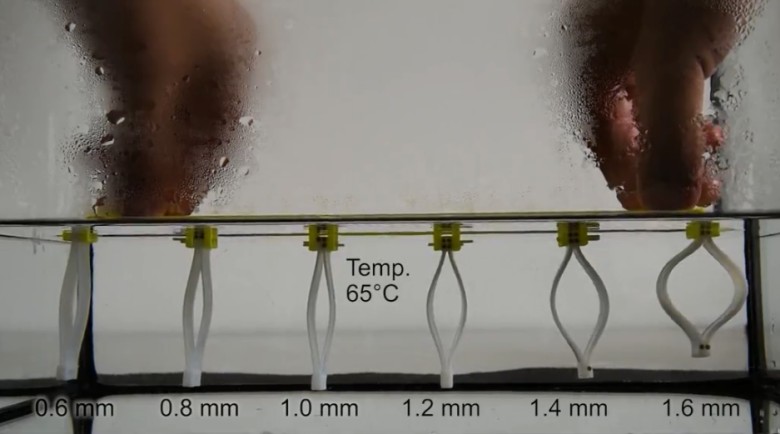
 La réaction des bandes de polymère flexible aux changements de température dépend de leur épaisseur. On voit ici des bandes de 0,6 mm à 1,6 mm placées dans l'eau à 65 ° C. La vitesse de redressement varie de 7 à 37 secondes, ce qui vous permet de programmer les actions du robot dans une certaine séquence
La réaction des bandes de polymère flexible aux changements de température dépend de leur épaisseur. On voit ici des bandes de 0,6 mm à 1,6 mm placées dans l'eau à 65 ° C. La vitesse de redressement varie de 7 à 37 secondes, ce qui vous permet de programmer les actions du robot dans une certaine séquenceDes ingénieurs de l'Institut californien de technologie et des collègues de l'École technique supérieure de Zurich
ont créé des robots qui peuvent se déplacer indépendamment sans utiliser de moteurs, de servos ou de source d'alimentation. Cela ressemble à une machine à mouvement perpétuel? Pas vraiment. Le fait est que chaque paire de rames ou «muscles» est capable d'
un seul mouvement de rames après que le robot est descendu dans l'eau. Mais le point culminant est que les muscles et les rames peuvent être autant que vous le souhaitez - et ils peuvent travailler à différents intervalles de temps l'un après l'autre. Ainsi, vous pouvez préprogrammer la trajectoire du robot, ainsi que réaliser diverses actions - par exemple, décharger une cargaison suivie d'une manœuvre d'esquive. La recherche a été financée par l'Army Research Office.
Malgré l'apparente simplicité, ce sont les premiers appareils de ce type qui utilisent la déformation du matériau pour des actions programmées en température dans l'eau. Le principe de fonctionnement est montré dans les
vidéos de démonstration .
Liste des démos vidéo
- Un coup . La distance parcourue d'un coup correspond approximativement à 1,15 de la longueur du robot.
- La réaction des «muscles» à un changement de température dépend de l'épaisseur des bandes du polymère souple. La vidéo montre des bandes d'une épaisseur de 0,6 mm à 1,6 mm lorsqu'elles sont placées dans l'eau à 65 ° C. La vitesse de redressage varie de 7 à 37 secondes.
- Mouvement d'un robot rameur avec deux paires de rames . La séquence des coups est régulée par l'épaisseur des muscles des première et deuxième paires de rames. La distance parcourue depuis le double coup est environ 1,9 fois la longueur du robot.
- Mouvement avec un virage à gauche . La première paire de rames fait avancer le robot d'environ 0,5 de son corps, et la rame du deuxième étage fait tourner le corps d'environ 21,45 °.
- Mouvement à deux tours . Après le premier coup, le robot tourne d'environ 21,64 ° vers la gauche, et après le deuxième coup, il tourne d'environ 21,45 ° vers la droite.
- Muscles en un autre matériau qui se dilatent à une température différente de 40 ° C. La vidéo montre que le matériau précédent ne répond pas à cette température. Ainsi, les scientifiques peuvent programmer le robot pour différents mouvements en fonction de la température ambiante.
- Un exemple d'algorithme complexe . Le robot nage la distance définie, laisse tomber la charge, puis flotte dans la direction opposée. La première condition est fournie par des bandes de polymère plus minces qui se déclenchent plus tôt. La charge est sécurisée par des bandes épaisses qui réagissent plus tard et libèrent la charge une fois que le robot a parcouru la distance programmée.
- Le mécanisme interne de l'actionneur montre comment le muscle appuie et transfère le mécanisme bistable d'un état d'équilibre à un autre.
Selon les développeurs, cette étude «efface en quelque sorte la frontière entre les matériaux et les robots», car le matériau lui-même agit comme une machine dans l'appareil: «Nos exemples montrent que nous pouvons utiliser des matériaux structurés qui se déforment en réponse aux signaux environnementaux, pour le contrôle et le mouvement des robots,
explique Chiara Daraio, professeur de génie mécanique et de physique appliquée au California Institute of Technology en génie et en sciences appliquées, l'un des auteurs d'un article scientifique.
Le robot est entraîné par des bandes de polymère flexible, qui rétrécit à froid et s'étire lorsqu'il est chauffé. Le polymère est positionné de manière à activer un interrupteur bistable dans le corps du robot, qui à son tour est attaché à un élément mobile, par exemple, à une palette pour avancer.
L'étude est basée sur
des travaux scientifiques antérieurs sur les chaînes d'éléments bistables pour la transmission de signaux et la conception de portes logiques d'une machine programmable.
En plus de la température, le robot peut être programmé pour effectuer des actions en fonction d'autres conditions - par exemple, pour répondre aux changements d'acidité du milieu.
L'article scientifique a été
publié le 15 mai 2018 dans la revue
Proceedings of the National Academy of Sciences of the United States of America (doi: 10.1073 / pnas.1800386115,
pdf ).