Tout d'abord, j'ai écrit une longue introduction d'où venait une telle tâche, puis cela m'a semblé ennuyeux et je l'ai supprimée.
Alors, la tâche: la création d'un drone autonome pour surveiller l'état des lignes électriques (lignes électriques).
Depuis:
- c'est un projet de loisir et je peux faire une grosse erreur dans mes calculs
- les objets volants présentent un danger pour les êtres vivants et leurs biens,
alors cet article ne doit être considéré que comme un horizon en expansion et non comme un guide pour l'action.
Liste des défauts pour la détection sur les lignes électriques.
Exigences relatives aux UAV
- Décollage et atterrissage verticaux (sans catapultes ni parachutes), c'est-à-dire un hélicoptère
- Capable de décoller, voler à des points donnés, revenir en arrière et atterrir automatiquement
- Vous pouvez modifier une mission de vol, donner une commande pour décoller et atterrir de n'importe où dans le monde
- Télémétrie diffusée et vidéo en temps réel sur Internet
- Téléchargement de photos et de vidéos de la caméra embarquée sur le serveur pendant ou après le vol
- Charger ou remplacer mécaniquement la batterie sans intervention humaine.
Et aussi deux exigences contradictoires:
- Électronique fiable (si elle tombe quelque part, considérez-la comme perdue)
- Le coût relativement faible de l'expérience (si elle se situe quelque part, considérez-la comme perdue)
Le degré d'autonomie est idéalement fantastique: le drone vole le long d'un itinéraire pré-planifié, télécharge une photo sur le serveur, le logiciel sur le serveur identifie les défauts sur la photo et fait une demande à l'équipe de réparation avec les coordonnées des chantiers. Le drone lui-même ne devrait pas nécessiter l'attention d'une personne avant la fin de la vie active d'une pièce, par exemple une batterie ou des roulements.
Il est clair que cette tâche ne dure pas un an, mais je vais commencer, et peut-être que quelqu'un va reprendre et continuer.
Par exemple, des versions industrielles finies de complexes autonomes:
un ,
deux ,
trois ,
quatre ,
cinq ,
six ,
sept ,
huit ,
neuf ,
dix ,
onze ,
douze ,
treize ,
quatorze . J'ai écrit des demandes à tout le monde en tant qu'acheteur potentiel pour connaître les prix. D'entre eux prêts à la vente: 2; prêt à vendre en Russie: 0.
Choisir un contrôleur de vol
Comme je dois diffuser de la vidéo et de la télémétrie via Internet, il me vient immédiatement à l'esprit de mettre un micro-ordinateur avec un modem 4G et une caméra sur le drone et de faire une webdiffusion à partir de ce kit. De telles solutions ont été trouvées:
une ,
deux ,
trois . Ce sont des cartes simples ordinaires avec un modem et une caméra USB 4G externes. Pour coder et diffuser la vidéo,
gstreamer est utilisé. Mais ces choses elles-mêmes ne savent pas comment contrôler le drone, elles doivent être utilisées en conjonction avec le contrôleur de vol.
Le contrôleur de vol est le cerveau du drone. Il surveille l'état des capteurs de position (gyroscope, accéléromètre, boussole), les coordonnées GPS, la position des poignées sur le panneau de commande et, sur la base de ces données, contrôle les moteurs pour accrocher à un point ou voler quelque part. Le contrôleur de vol devra être en quelque sorte connecté à l'ordinateur de bord afin que vous puissiez charger la tâche de vol ou indiquer un point arbitraire où voler et quand allumer la caméra.
En vente, vous pouvez trouver de nombreux contrôleurs différents qui sont très différents les uns des autres en termes de prix et de fonctionnalités. Certains d'entre eux travaillent sur leur propre logiciel, et certains utilisent des logiciels open source, comme
Ardupilot et son fork
PX4 .
Avec Ardupilot, j'ai joué sur
des atmegs 8 bits qui n'avaient pas de chargeur de démarrage USB, mais ils étaient cousus sur le programmeur. Depuis lors, je ne l'ai pas rencontré et j'ai été agréablement surpris lorsque j'ai découvert qu'il pouvait désormais travailler sur des ordinateurs Linux 64 bits, il avait une énorme communauté d'utilisateurs, à la fois passe-temps et pros, une longue liste de capteurs pris en charge prêts à l'emploi et peints.
plans pour 2018-2019 . Pendant ce temps, il a réussi à devenir un projet
DroneCode , puis à s'en
déconnecter .
À première vue, il vient de mettre en œuvre toutes les fonctions nécessaires: décollage et atterrissage automatiques, chargement des tâches de vol, il existe des applications de bureau et mobiles pour toutes les principales familles d'OS. Les programmes de contrôle (GCS - Ground Control Station) communiquent avec le contrôleur embarqué via des messages courts via le
protocole MAVLink ouvert via un ensemble de modems radio (le drone envoie la télémétrie, le GCS envoie les commandes de contrôle). Je soupçonne que ces messages peuvent être lancés via Internet.
Jetez un œil à la
liste des contrôleurs pris en charge et prenez quelque chose. Il y a une douzaine d'options, de petite à grande et avec des caractéristiques différentes.
Parmi toute la variété des contrôleurs, j'ai aimé plusieurs options:
| Contrôleur de vol | Erle PXFMini | Emlid edge | Navio 2 | Erle Brain 3 | PixHawk 2 Cube |
| Ordinateur supplémentaire | Raspberry Pi Zero W | non | Raspberry pi 3 | non | Raspberry pi 3 |
| | | | | |
| Régler le poids, g | 84 | 97 | 98 | 145 | 150 |
| CPU, total | 1 | 2 | 2 | 1 | 3 |
| OS fonctionnant simultanément | 1 | 1 | 1 | 1 | 2 |
| Capteurs IMU, kits | 1 | 2 | 2 | 1 | 3 |
| Capteur de pression d'air | 1 | 2 | 1 | 1 | 1 |
| Redondance d'alimentation | non | 2x | 3x | non | 2x |
| GPS, Glonass | module externe
avec magnétomètre supplémentaire | module externe
avec magnétomètre supplémentaire | récepteur intégré, antenne externe | module externe
avec magnétomètre supplémentaire | module externe |
| Entrée vidéo | CSI sur framboise | HDMI | CSI sur framboise | CSI | CSI sur framboise |
| Wifi | est là | est là
Longue portée 2 km
+52 g | est là | est là | est là |
| | | | | |
| Le coût du kit, $ | 212 | 700 | 215 | 341 | 331 |
Le kit le plus léger (84 g) est obtenu à partir du micro-ordinateur
Raspberry Pi Zero W (9 g), du contrôleur
Erle PXFMini (15 g), du module GNSS externe natif (46 g) et d'un
concentrateur USB supplémentaire (14 g).

Il n'y a qu'un seul processeur fonctionnel dans ce kit - sur le Raspberry Pi. Sur celui-ci est suspendu le contrôle PWM des régulateurs de moteur, la lecture des lectures des capteurs, Linux OS avec toutes les tripes et le décodage de la vidéo de la caméra. Étant donné que le Pi Zero n'a pas de ports USB, dans cette option, vous devez utiliser un concentrateur externe. Capteurs IMU et entrée d'alimentation sans redondance.
Le prochain ensemble (97 g) d'une entreprise de Hong Kong avec des noms russes dans l'équipe de développement est le contrôleur
Emlid Edge (59 g) avec un module GNSS (38 g). Le module GNSS fonctionne selon le protocole
UAVCAN et est en outre équipé d'un magnétomètre et d'un capteur de pression d'air. Ici, un processeur ARM Cortex-M3 distinct est responsable de PWM, Linux OS tourne sur le quadricœur principal ARM Cortex-A53.

Le contrôleur dispose d'une entrée vidéo HDMI, ce qui vous permet de connecter directement à celle-ci n'importe quelle caméra avec une telle sortie, par exemple GoPro 4 ou 5. Le coût relativement élevé s'explique par les émetteurs-récepteurs wifi longue portée dans le kit (jusqu'à 2 km avec diffusion vidéo HD). Le poids du module embarqué (52 g) n'est pas inclus dans le tableau général, car j'ai besoin d'une communication 4G, cependant, vous pouvez garder cette option à l'esprit: à partir d'un wifi à longue portée, vous pouvez créer un canal de communication de secours via un routeur fixe avec Internet câblé.
L'option suivante (98 g) se compose du célèbre micro-ordinateur
Raspberry Pi 3 (45 g) avec un contrôleur de bouclier
Navio 2 (23 g) du même Emlid et une antenne GNSS externe (30 g). Le contrôleur dispose d'un processeur Cortex-M3 séparé pour contrôler le PWM sur 14 canaux et décrypter les signaux SBUS et PPM entrants du récepteur. Celui-ci, à son tour, est contrôlé par le pilote du noyau Linux, qui s'exécute sur Raspberry.

Le contrôleur est équipé d'une paire de capteurs IMU séparés (accéléromètre, gyroscope, magnétomètre) MPU9250 et LSM9DS1, un capteur de pression atmosphérique et un module GNSS
U-blox NEO-M8N , qui voit GPS, Glonass et BeiDou avec une antenne externe via le connecteur MCX.
Vous pouvez alimenter cette "tarte" à partir de 5 volts en même temps sur trois côtés, qui fonctionnent comme des sources indépendantes se dupliquant: le connecteur d'alimentation principal sur le blindage, les sorties servo PWM, micro-USB sur Raspberry.
Le contrôleur
Erle Brain 3 (100 g) avec un module GPS externe (45 g) par son poids, son prix et un ensemble de capteurs regarde dans le tableau de sorte que je ne vais même pas insérer de photo ici.
Ensuite, nous avons le kit le plus fiable et le plus lourd (150 g), qui se compose du populaire contrôleur de vol
PixHawk 2 Cube (80 g) avec une architecture ouverte et un ordinateur Raspberry Pi 3. Au lieu de Raspberry dans ce cas, vous pouvez utiliser n'importe quelle carte simple légère, par exemple,
Odroid XU4 ,
NVIDIA Jetson ou tout autre avec les bonnes interfaces et le bon poids.

PixHawk lui-même dispose de 2 processeurs: le premier Cortex M4 STM32F427 32 bits - le principal qui exécute le
système d' exploitation en temps réel
NuttX (RTOS) et le deuxième STM32F103 32 bits à sécurité intégrée. Le contrôleur est réalisé sous forme de modules: les processeurs et capteurs IMU sont installés dans le cube (sur un support anti-vibration, et même avec chauffage), et l'alimentation et les connecteurs à toute la périphérie sont amenés à la base. Il est supposé que les bases peuvent être différentes et que chacun peut développer les leurs pour répondre à des exigences spécifiques, sur lesquelles vous pouvez ensuite placer le cube fini. À propos, il existe une version prête à l'emploi avec un connecteur pour installer le micro-ordinateur
Intel Edison . Mais, comme Intel ne publie plus ces ordinateurs, Raspberry sera également inclus dans ce kit en tant qu'ordinateur de bord.
Raspberry est utilisé comme un ordinateur supplémentaire pour se connecter à Internet et vous pouvez y exécuter toutes les tâches gourmandes en ressources (par exemple, la reconnaissance des formes dans OpenCV), sans craindre que les échecs de ce processus "pèsent" sur les fonctions critiques, telles que la commande du moteur.
Donc, compte tenu du poids, des spécifications et du prix, la première place pour moi est le kit Navio 2 + Raspberry, et le deuxième Pixhawk 2 Cube + Raspberry (+52 g). Maintenant, si sous Pixhawk il y avait une base dans le connecteur pour le petit Raspberry Zero, et même une sortie USB, ce serait plus intéressant. Mais vous ne pouvez toujours pas en acheter un, mais ce n'est pas encore intéressant de le faire.
J'écrirai dans des notes qu'une fiabilité accrue coûte 52 grammes supplémentaires et 110 $. D'après les résultats des calculs totaux, ces chiffres peuvent s'avérer insignifiants.
Charge autonome
Comme vous pouvez le voir dans les versions finales ci-dessus, il existe plusieurs approches pour préparer un drone autonome pour le prochain vol: charger la batterie via des plots de contact, charger par induction sans contact et remplacer mécaniquement la batterie avec sa charge ultérieure à la station.
Chaque méthode a ses avantages et ses inconvénients, j'écrirai à leur sujet séparément, mais dans tous les cas, pour leur fonctionnement, le drone doit pouvoir atterrir au point souhaité avec une précision de près d'un centimètre.
Atterrissage "au point"
Pour un atterrissage exact, vous pouvez utiliser la caméra d'ordinateur de bord standard, des marqueurs visuels et OpenCV pour les reconnaître. Voici
une solution que vous pouvez google.
Un autre nouveau est apparu lorsque j'ai écrit cet article. Mais la reconnaissance des formes est un processus assez long pour Raspberry, et vous ne voulez pas le télécharger sans besoin particulier. De plus, la qualité de la reconnaissance dépendra grandement du matériau dont le marqueur est fait et des conditions d'éclairage. Il est souhaitable qu'il s'agisse d'un capteur séparé et donne des coordonnées toutes faites au point visuel souhaité, quels que soient la présence et l'angle d'incidence de la lumière. Et tel est dans la liste des équipements Ardupilot pris en charge, appelés
IR-Lock .
 Airobotics
Airobotics de la liste ci-dessus utilise également cette solution. Il est basé sur le
module de caméra open source
Pixy CMUcam5 . Ce module est équipé d'une caméra et d'un processeur, et il peut être «appris» à reconnaître certaines images d'objets, puis, en sortie, à obtenir des coordonnées prédéfinies de ces objets dans l'image.
Connaissant les coordonnées de l'image reconnue sur l'image et la distance à celle-ci, le contrôleur de vol calcule jusqu'où et dans quelle direction le drone doit être déplacé.
La modification de l'IR-Lock consiste dans le fait qu'une
lampe de poche IR à LED est utilisée comme marqueur pour être reconnu, et sur la caméra les objectifs conventionnels sont remplacés par ceux qui ne transmettent que la lumière IR. Par conséquent, sous n'importe quelle lumière, l'appareil photo voit la luminescence de la lampe en blanc sur fond noir (et rien de plus), ce qui augmente considérablement la précision de la reconnaissance.
Pour le fonctionnement normal de ce capteur, un
télémètre est également nécessaire, qui mesurera la hauteur au-dessus du sol. Les développeurs recommandent d'utiliser un télémètre laser, par exemple
LightWare LW20 (20 grammes et 299 $, mesure jusqu'à 100 m), ou un
VL53L0X bon marché et court (moins de 1 gramme et 10 $, mesure jusqu'à 2 m), qui est devenu
pris en
charge dans les dernières versions d'Ardupilot. Pour une raison quelconque, le capteur à ultrasons à des fins d'atterrissage ne mérite pas la confiance des développeurs IR-Lock.
Soit dit en passant, les drones DJI atterrissent automatiquement à l'aide d'ultrasons et de caméras stéréo.
Accrochez-vous comme un homme mort
Pour que le drone se bloque au même endroit et ne «nage» pas, le GPS seul ne suffit pas. Malheureusement, en raison de l'atmosphère, les coordonnées des récepteurs GPS peuvent flotter à des dizaines de mètres, et des systèmes de correction
GPS RTK doivent être utilisés pour une précision centimétrique. Ce système utilise une station fixe terrestre comme standard pour les écarts de coordonnées et la communication radio avec la carte pour y envoyer les valeurs de ces écarts. Une telle chose est nécessaire pour prendre des plans photographiques, puis les coller dans de grandes cartes, et pour les accrocher, je me limiterai au capteur optique
PX4Flow pour l'
instant .
Il fonctionne sur le même principe qu'une souris optique. Contrairement à IR-Lock, il ne reconnaît pas une image spécifique et dans Ardupilot, ils fonctionnent dans différents modes de vol. L'image de la caméra est analysée avec un décalage de 400 fois par seconde, et les valeurs de décalage calculées peuvent être lues par le contrôleur à l'aide du protocole I2C. Le capteur (
open-hardware ) pèse 15 grammes et a tout ce dont vous avez besoin sur votre carte: un processeur Cortex M4F 168 MHz (128 + 64 Ko de RAM), un capteur optique 752 × 480 MT9V034 et un gyroscope 3 axes L3GD20. Pour son fonctionnement normal, il est également recommandé d'utiliser un télémètre laser, au lieu d'un ultrason. Bien que le module lui-même fournisse un connecteur juste pour le capteur à ultrasons.
Kit électronique minimum
Voici ce qui s'est rassemblé:
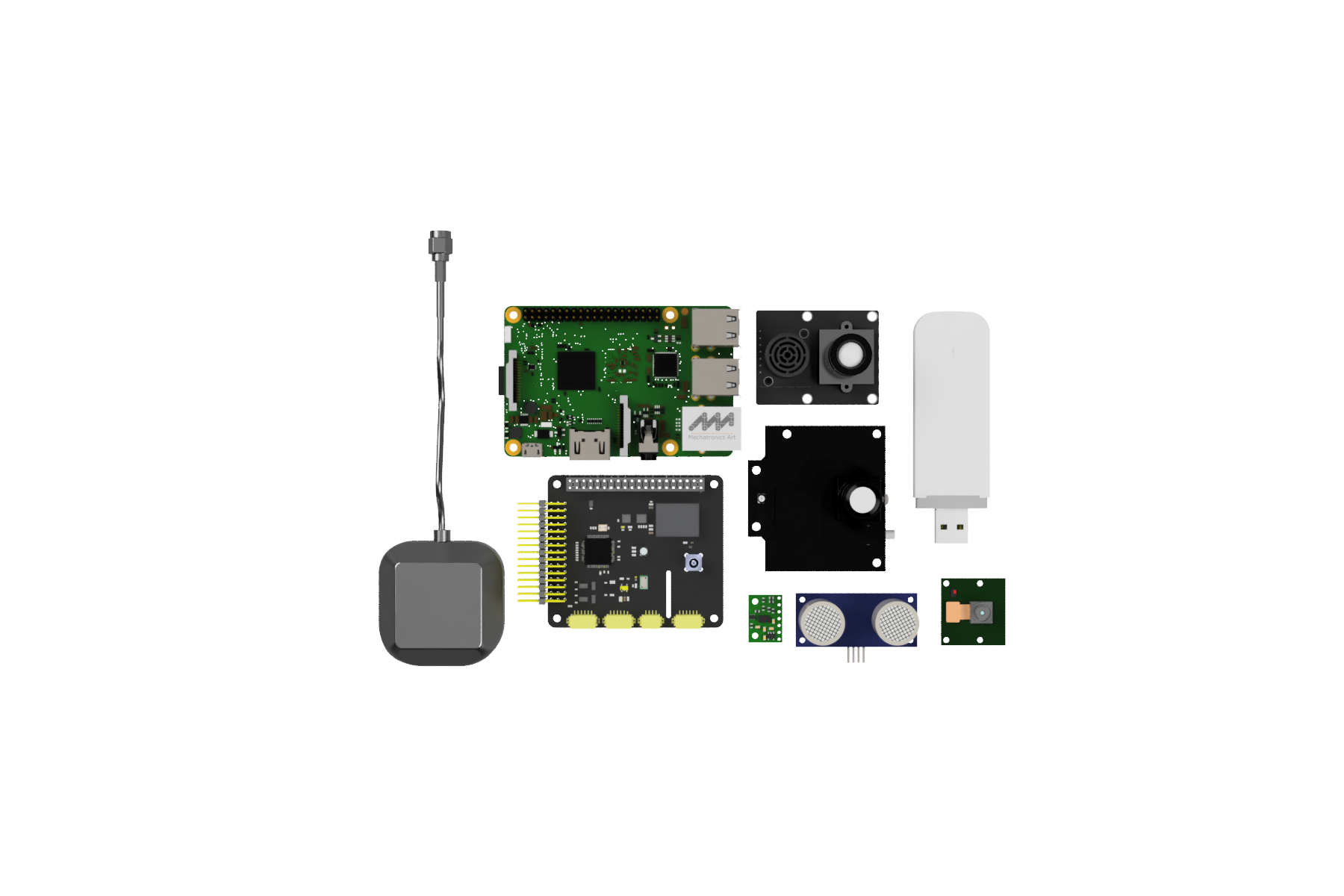
Le poids total est de 199 g. Tous les composants fonctionnent à partir de 5 volts et consomment près de 2 ampères (10 watts) en mode de diffusion vidéo.
Le kit contient un capteur de distance à ultrasons qui se penchera sur le sujet des obstacles. J'ai laissé la stéréo-vision et les lidars circulaires pour plus tard, si un réel besoin s'en faisait sentir.
Charge utile
Étant donné que l'appareil photo natif de Raspberry prend des photos de qualité moyenne et ne sait pas non plus comment capturer des photos en même temps que la vidéo, il ne sera utilisé que pour la diffusion sur le Web, et comme appareil photo principal, vous avez besoin d'un appareil approprié pour détecter les défauts sur les lignes électriques.
GoPro Hero 5 Session , multispectral
Parrot Sequoia , dual
Sentera Double 4K et infrarouge
FLIR Vue Pro conviennent à la plupart des éléments de la liste des défauts détectés. Chacun d'eux pèse environ 100 g.
Pour stabiliser la caméra afin d'améliorer la qualité des images, une suspension axiale 2 ou 3 volera dans la charge avec elle.
 Les
Les suspensions
simples à 3 axes pèsent environ 160 g et sont alimentées par 12 volts, ont un courant de travail à cette tension d'environ 50 mA et un courant maximum de 700 mA lorsque les moteurs se bloquent.
La nutrition
Pour alimenter tous les appareils électroniques, des sources de 5 volts (minimum 2,2 ampères) et 12 volts (minimum 1 ampère) sont nécessaires. Compte tenu de la puissance de secours du contrôleur de vol, vous avez besoin de deux sources indépendantes de 5 volts. Vous pouvez créer un système d'alimentation à partir de modules individuels de valeur nominale appropriée ou trouver un «3 en 1» prêt à l'emploi, par exemple,
tel (24 g, tension d'entrée maximale jusqu'à 28 Volts, sorties 3A). Un
capteur de courant (22 g) y sera connecté afin de pouvoir mesurer la consommation mAh de la batterie.
Kit électronique + caméra + suspension + système d'alimentation pèse 505 g.
Moteurs et hélices
Sur de nombreux drones professionnels, j'ai vu
des moteurs et des hélices
T-Motor . Apparemment pas décontracté. Dans la documentation Ardupilot, ils sont également
recommandés comme système de propulsion pour les drones professionnels. Par conséquent, nous chercherons des moteurs appropriés pour eux.
Pour que le drone vole pendant longtemps, des moteurs avec une efficacité maximale sont nécessaires. L'efficacité des faisceaux de moteurs et d'hélices est mesurée par la quantité de poussée en grammes pour 1 watt d'énergie consommée.
Pour savoir quel moteur est le plus approprié, vous devez connaître le poids total du drone entièrement assemblé, en tenant compte du cadre, de la batterie et des moteurs eux-mêmes avec des vis. La batterie est nécessaire pour qu'elle dure 30 minutes. Le cadre est nécessaire pour que tout y tienne et que les vis ne touchent à rien.
Trop d'inconnues, je vais donc utiliser la
calculatrice en ligne
pour quadcopters E-calc .
Ayant joué dans la calculatrice, j'ai choisi les
moteurs Antigravity 4004 KV300 (53 g) avec des vis
15x5 (27 g). Dans le mode optimal, avec une tension d'alimentation de 24 Volts, un tel kit tire 474 grammes à un courant de 1,4 A. L'efficacité est de 14,11 g / W, le rapport traction / poids mort = 5,9: 1. À pleine vitesse, la poussée est de 1311 grammes à un courant de 7,5 A. L'hélicoptère sera avec quatre moteurs, c'est-à-dire un quad. Masse au décollage optimale = (474 g * 4 moteurs) = 1896 g, maximum (en tenant compte du rapport poussée-poids de 2: 1) = (1311 g * 4 moteurs) / 2 = 2622 g.
Les moteurs sont contrôlés par des contrôleurs de vitesse. La tension d'alimentation des moteurs = 24 Volts, le courant de fonctionnement maximum = 7,5 A, vous avez donc besoin d'un régulateur pour une telle tension et avec un courant de travail, en tenant compte de la marge, au moins 10A. T-Motor a le régulateur le plus léger (7 g sans fils) pour cette tension - c'est
FPV 35A-32bit 3-6S . Il est fabriqué sur la base du micrologiciel
BLHeli-32 populaire, avec code fermé, mais avec des paramètres larges et un
grand nombre d'analogues .
Sous-total:VMG (groupe hélice-moteur), composé de moteurs, d'hélices et de régulateurs (4 pièces chacun) pèse 346 g.
Avec l'électronique et une charge utile (346 + 505), on obtient 851 g en tenant compte des fixations, fils et connecteurs (estimons +100 g) = 951 g.
Avec un poids optimal, le cadre et la batterie restent (1896 - 951) = 945 g. Avec un maximum (2622 - 951) = 1671 g.
Cadre
Nous calculons la taille minimale du cadre afin que les hélices de 15 pouces sélectionnées n'interfèrent pas entre elles pour créer une traction. Les dimensions des fabricants de châssis indiquent la distance entre les axes des moteurs situés en diagonale les uns des autres.
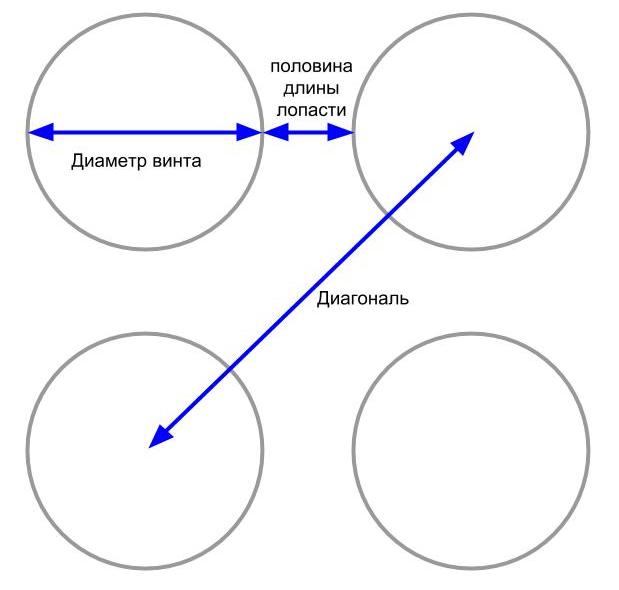
Sur l'image, vous pouvez trouver l'hypoténuse, qui est calculée à partir de la jambe, égale à la somme du diamètre de la vis et de la distance entre les hélices. Les pales d'hélice de 15 pouces adjacentes tourneront de 1 millimètre l'une de l'autre à une diagonale de cadre de 540 mm. Ajoutez un peu d'espace et la taille d'un cadre approprié sera d'environ 600 à 700 mm.
Vous pouvez en trouver de nombreux en vente, par exemple, une fois : 600 mm et 750 g, deux : 650 mm et 450 g, trois : 690 et 675 g, quatre : 650 mm et 750 g . Tous se distinguent par les performances et la présence d'éléments pliables (châssis, poutres) pour une facilité de transport.Je vais reporter la sélection d'une instance spécifique à mes besoins, pour plus de calcul je garderai à l'esprit le poids du cadre de 450 g.Il reste une batterie pesant 495 g pour le poids optimal et 1221 g pour le maximum.La batterie
Pour sélectionner une batterie, vous devez savoir ce qu'elle doit fournir en courant.À pleine vitesse, les moteurs "consommeront" 30 A (moteurs 7,5 A * 4) et l'électronique environ 0,45 A (10 watts). Compte tenu de la faible marge, nous arrondissons le courant de fonctionnement minimal de la batterie de 35A. Pour les batteries Li-Po avec une sortie de courant élevée à 30 ° C, la capacité minimale sera de 1,2 Ah (35/30), et pour les batteries Li-Po et Li-Ion plus légères avec une sortie de courant à 10 ° C, la capacité minimale est de 3,5 Ah (35/10) .En option, l'assemblage du 6S2P du Li-Ion Sony VTC6avec un BMS, il pèse environ 630 g (avec une capacité de 6 Ah). Avec cette batterie, le drone pèsera 2031 g, soit 135 g de plus qu'optimal, mais dans les limites du maximum. Calculons maintenant combien de temps l'hélicoptère peut geler dans des conditions idéales. Avec un poids total de 2031 g, chaque moteur a 508 g. Jetons un coup d'œil aux caractéristiques du moteur et trouvons la consommation de courant avec cette traction. Elle sera approximativement égale à 1,6A. 4 moteurs et électronique donneront un total de 6,85 A (1,6 * 4 + 0,45). Compte tenu de la décharge de la batterie jusqu'à 20%, il s'avérera (6 Ah * 80% / (6,85 A)) = 0,7 heure ou 42 minutes.Disposition
 Alors que je choisissais le bon cadre et pensais comment tout placer dessus et comment le réparer, je suis arrivé à la conclusion qu'il serait plus facile de dessiner certains détails et de commander l'impression 3D à partir de plastique et le fraisage à partir de carbone. Une paire de pièces finies de fer et de matériel peut être commandée sur Aliexpress.
Alors que je choisissais le bon cadre et pensais comment tout placer dessus et comment le réparer, je suis arrivé à la conclusion qu'il serait plus facile de dessiner certains détails et de commander l'impression 3D à partir de plastique et le fraisage à partir de carbone. Une paire de pièces finies de fer et de matériel peut être commandée sur Aliexpress.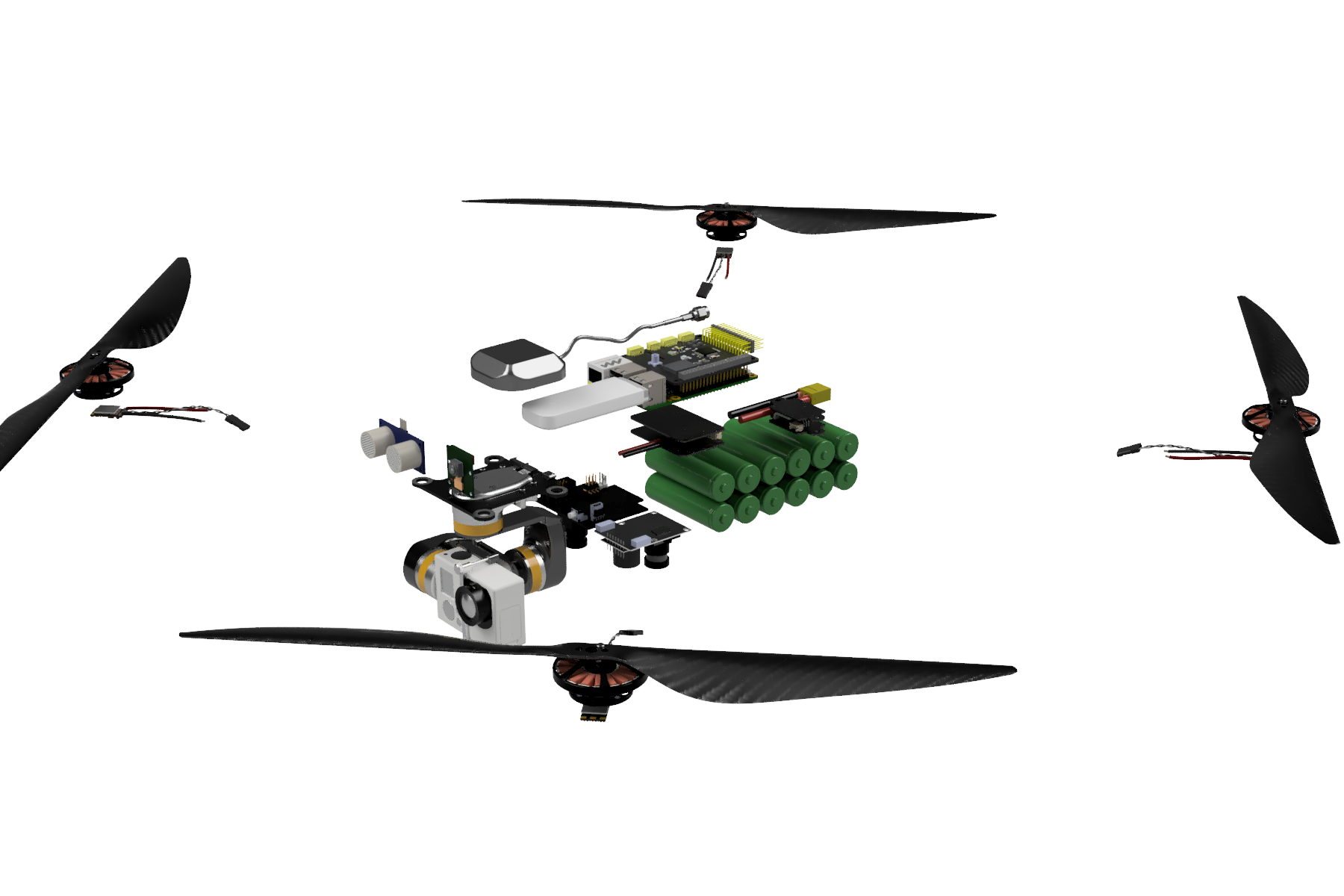 Après avoir un peu expérimenté la disposition et le centre de gravité, nous avons obtenu un tel cadre:
Après avoir un peu expérimenté la disposition et le centre de gravité, nous avons obtenu un tel cadre: il se compose de tubes et plaques de carbone, de pièces en aluminium et de fixations en titane. Le poids du cadre estimé est de 350 g avec une diagonale de 700 mm. Modèle de cadre 3D et liste de pièces .Modèle entièrement assemblé (sans fils):
il se compose de tubes et plaques de carbone, de pièces en aluminium et de fixations en titane. Le poids du cadre estimé est de 350 g avec une diagonale de 700 mm. Modèle de cadre 3D et liste de pièces .Modèle entièrement assemblé (sans fils): Le poids total de l'hélicoptère avec l'électronique, une batterie Li-Ion 6S2P et les fils doit être de 1931.Oui, il m'a également semblé que le drone était trop nu pour une version autonome et que la pluie fine mouillerait facilement l'électronique embarquée. Par conséquent, j'ai ajouté un peu de plastique:
Le poids total de l'hélicoptère avec l'électronique, une batterie Li-Ion 6S2P et les fils doit être de 1931.Oui, il m'a également semblé que le drone était trop nu pour une version autonome et que la pluie fine mouillerait facilement l'électronique embarquée. Par conséquent, j'ai ajouté un peu de plastique: modèle 3D du cadre . Liste des détails du cadre .Assemblage du modèle 3D . Liste des composants .Le poids d'un cadre vide avec un boîtier de 384 g, poids total 2020 g, temps de suspension estimé sur une charge (décharge de la batterie jusqu'à 20%): 44 minutes.
modèle 3D du cadre . Liste des détails du cadre .Assemblage du modèle 3D . Liste des composants .Le poids d'un cadre vide avec un boîtier de 384 g, poids total 2020 g, temps de suspension estimé sur une charge (décharge de la batterie jusqu'à 20%): 44 minutes.Boîte de chargement
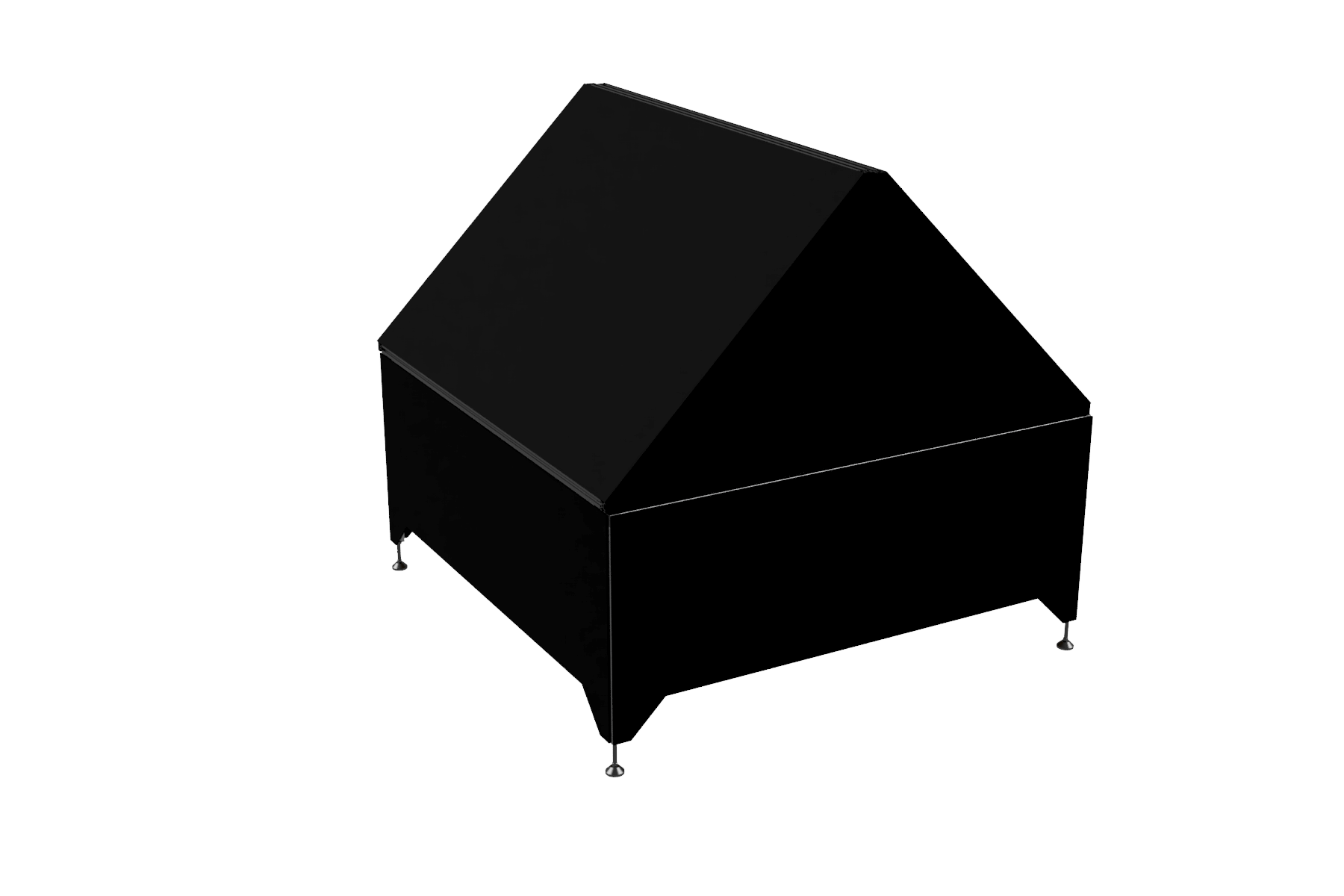
 Le boîtier de chargement sera composé d'un profilé en aluminium, de matériel de montage et de panneaux sandwich en aluminium. Il disposera d'un routeur, d'un ordinateur, de capteurs météorologiques et d'une caméra avec vue sur la zone d'atterrissage. J'ai décidé de faire un toit en pente de deux ailes pour qu'en hiver, il n'accumule pas de neige et ne gêne pas l'ouverture. Le mécanisme d'ouverture des vannes n'est pas encore complètement pensé et le système de charge n'est pas encore défini (j'ai besoin de conseils).
Le boîtier de chargement sera composé d'un profilé en aluminium, de matériel de montage et de panneaux sandwich en aluminium. Il disposera d'un routeur, d'un ordinateur, de capteurs météorologiques et d'une caméra avec vue sur la zone d'atterrissage. J'ai décidé de faire un toit en pente de deux ailes pour qu'en hiver, il n'accumule pas de neige et ne gêne pas l'ouverture. Le mécanisme d'ouverture des vannes n'est pas encore complètement pensé et le système de charge n'est pas encore défini (j'ai besoin de conseils). Dans le prochain article, je vais vous dire comment configurer et lancer un drone via Internet en utilisant l'interface graphique ou la ligne de commande, sur les options de système de charge que je choisis maintenant, les logiciels pour contrôler l'hélicoptère et analyser les images, et pourquoi mon premier vol sur Internet n'a pas duré aussi longtemps:
Dans le prochain article, je vais vous dire comment configurer et lancer un drone via Internet en utilisant l'interface graphique ou la ligne de commande, sur les options de système de charge que je choisis maintenant, les logiciels pour contrôler l'hélicoptère et analyser les images, et pourquoi mon premier vol sur Internet n'a pas duré aussi longtemps:
À suivre ...Partie 2 sur les logiciels.